Задача Д1 – на интегрирование дифференциальных уравнений движения точки (решение основной задачи динамики). Решение задачи разбивается на две части. Сначала нужно составить и проинтегрировать методом разделения переменных дифференциальное уравнение движения точки (груза) на участке АВ, учитывая начальные условия. Затем, зная время движения на участке АВ или его длину, определить, какую скорость будет иметь груз в точке В. Эта скорость будет начальной для движения груза на участке ВС. После этого нужно составить и проинтегрировать дифференциальное уравнение движения груза на участке ВС тоже с учетом начальных условий, ведя отсчет времени от момента, когда груз находится в точке В, и полагая, что в этот момент времени t = 0. При интегрировании уравнения движения на участке АВ в случае, когда задана длина L участка, целесообразно перейти в уравнении к переменной х учитывая, что

Дано:  кг,
кг,  м/с,
м/с,  Н,
Н,  кг/м,
кг/м,  с,
с,  Н,
Н,  ,
,  °,
°,  ,
,  с-1,
с-1,  с.
с.
Определить:  , где
, где  ,
,  ,
,  .
.

| Рисунок Д1 |
Рассмотрим движение шара на участке  . Принимаем шар за материальную точку, покажем действующие на него силы: силу тяжести
. Принимаем шар за материальную точку, покажем действующие на него силы: силу тяжести  , нормальную реакцию
, нормальную реакцию  и силу сопротивления
и силу сопротивления  (рис. Д1). Выбираем систему координат
(рис. Д1). Выбираем систему координат  в соответствии с планом решения задачи. Составим дифференциальное уравнение движения шара на участке с учетом пункта 4 рекомендованного плана решения задачи.
в соответствии с планом решения задачи. Составим дифференциальное уравнение движения шара на участке с учетом пункта 4 рекомендованного плана решения задачи.
 ,
,
 ,
,  .
.  .
.
Разделим переменные и проинтегрируем:
 ;
;  .
.
 ;
;  .
.
Для определения постоянных интегрирования используем начальные условия задачи: при 
 и
и  . При полученное выше равенство можно записать в виде
. При полученное выше равенство можно записать в виде  . Отсюда
. Отсюда  . Тогда
. Тогда  ; следовательно, скорость шара на участке определится из выражения
; следовательно, скорость шара на участке определится из выражения  . Зная время движения
. Зная время движения  на участке , определим, какую скорость
на участке , определим, какую скорость  будет иметь шар в точке
будет иметь шар в точке  ,
,  м/с.
м/с.
Рассмотрим движение шара на участке  . На шар в соответсвии с условиями задачи действуют силы: сила тяжести , сила
. На шар в соответсвии с условиями задачи действуют силы: сила тяжести , сила  и нормальная реакция . Выбираем систему координат
и нормальная реакция . Выбираем систему координат  .
.
Составим дифференциальное уравнение движения шара на участке :  . Разделив обе части равенства на
. Разделив обе части равенства на  , можно записать
, можно записать  , или
, или  . Разделяя переменные и интегрируя
. Разделяя переменные и интегрируя  , получим
, получим  .
.
Это равенство можно представить в виде  .
.
Разделяя переменные и интегрируя,  , получим
, получим  . Для определения постоянных интегрирования используем начальные условия на участке : при ,
. Для определения постоянных интегрирования используем начальные условия на участке : при ,  . Тогда при
. Тогда при  , откуда
, откуда  .
.
Аналогично при и  имеем
имеем  , или
, или  Подставив
Подставив  и
и  в уравнения для определения скорости и закона движения на участке , получим
в уравнения для определения скорости и закона движения на участке , получим  ,
,  .
.
Тогда искомые скорость и расстояние от точки шара при с
 м/с,
м/с,
 м.
м.
Следовательно, окончательно закон движения шара на участке  , скорость
, скорость  м/с, расстояние от точки
м/с, расстояние от точки  м.
м.
Задача Д2
Механическая система состоит из прямоугольной вертикальной плиты L массой m1 = 24 кг и груза D массой m2 = 8 кг; плита или движется вдоль горизонтальных направляющих (рис. Д2.0 – Д2.4), или вращается вокруг вертикальной оси z, лежащей в плоскости плиты (рис. Д2.5 – Д2.9).


В момент времени t0 = 0 груз начинает двигаться под действием внутренних сил по имеющемуся на плите желобу; закон его движения s = AD = F (t) задан в табл. Д2, где s выражено в метрах, t – в секундах. Форма желоба на рис. Д2.0, Д2.1, Д2.8, Д2.9 – прямолинейная (желоб КЕ), на рис. Д2.2 – Д2.7 –окружность радиуса R = 0,8 м с центром в центре масс С, плиты (s = AD на рис. Д2.2 – Д2.7 отсчитывается по дуге окружности).
Плита (рис. Д2.0 – Д2.4) имеет в момент t0 = 0 скорость  = 0.
= 0.
Плита (рис. Д2.5 – Д2.9) имеет в момент времени t0 = 0 угловую скорость ω0 = 8с-1, в этот момент на нее начинает действовать вращающий момент М (момент относительно оси z), заданный в таблице в ньютонометрах и направленный как ω0 при М > 0 и в противоположную сторону при М < 0. Ось z проходит от центра С1 плиты на расстоянии b; размеры плиты показаны на рисунках.
Считая груз материальной точкой и пренебрегая всеми сопротивлениями, определить указанное в таблице в столбцах 4 и 9, где обозначено: в столбце 4 (относится к рис. Д2.0 – Д2.4) x1 – перемещение плиты за время от t0 = 0 до t1 = 1 с,  – скорость плиты в момент времени t1 = 1c,
– скорость плиты в момент времени t1 = 1c,  – полная сила нормального давления плиты на направляющие в момент времени t 1 = 1с (указать, куда сила направлена); в столбце 9 (относится к рис. 5 – 9) ω1 – угловая скорость плиты в момент времени t1 = 1с, ω = f(t) – угловая скорость плиты как функция времени. На всех рисунках груз показан в положении, при котором s = AD > 0; при s < 0 груз находится по другую сторону от точки А.
– полная сила нормального давления плиты на направляющие в момент времени t 1 = 1с (указать, куда сила направлена); в столбце 9 (относится к рис. 5 – 9) ω1 – угловая скорость плиты в момент времени t1 = 1с, ω = f(t) – угловая скорость плиты как функция времени. На всех рисунках груз показан в положении, при котором s = AD > 0; при s < 0 груз находится по другую сторону от точки А.

Указания. Задача Д2 – на применение теорем о движении центра масс и об изменении количества движения и кинетического момента системы. Теоремой о движении центра масс целесообразно воспользоваться в задаче, где нужно определить поступательное перемещение одного из тел системы (или реакцию связи), а теоремой об изменении количества движения – когда нужно определить скорость такого тела. Теорема об изменении кинетического момента применяется в задачах, где нужно найти угловую скорость или закон вращения одного из тел системы. При решении задачи учесть, что абсолютная скорость  груза слагается из относительной отн и переносной пер скоростей (определяются так же, как при решении задачи КЗ), т. е. = отн + пер.
груза слагается из относительной отн и переносной пер скоростей (определяются так же, как при решении задачи КЗ), т. е. = отн + пер.

Тогда количество движения груза m = m отн + m пер, а момент относительно оси z по теореме Вариньона (статика) будет mz (m ) = mz (m omн) +
+ mz (m neр); эти моменты вычисляются так же, как моменты силы.
Конкретнее ход решения разъяснен в примерах Д2.
Момент инерции плиты относительно оси С1 z', направленной так же, как ось z на рис. Д2.5 – Д2.9, но проходящей через центр масс С1 плиты, равняется m1  2/12, где – ширина плиты (в задаче = ЗR или = 4R). Для определения момента инерции I z относительно оси z воспользуемся теоремой Гюйгенса о моментах инерции относительно параллельных осей. Ось z при изображении чертежа провести на том расстоянии b от центра С 1, которое указано в таблице.
2/12, где – ширина плиты (в задаче = ЗR или = 4R). Для определения момента инерции I z относительно оси z воспользуемся теоремой Гюйгенса о моментах инерции относительно параллельных осей. Ось z при изображении чертежа провести на том расстоянии b от центра С 1, которое указано в таблице.
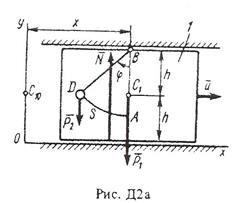 Пример Д2. К вертикальной плите 1 массой m1, с помощью невесомого стержня BD длиной прикреплен груз D массой т2 (рис. Д2а). В момент времени t0 = 0 стержень начинает вращаться вокруг точки В так, что расстояние s = AD изменяется по закону s = F (t), где s — в метрах, t – в секундах.
Пример Д2. К вертикальной плите 1 массой m1, с помощью невесомого стержня BD длиной прикреплен груз D массой т2 (рис. Д2а). В момент времени t0 = 0 стержень начинает вращаться вокруг точки В так, что расстояние s = AD изменяется по закону s = F (t), где s — в метрах, t – в секундах.
Плита движется по горизонтальным направляющим и при t0 = 0 ее скорость и =и0.
Дано: m1, = 12 кг, m2 = 6 кг, L = 0,8 м, t1 = 2с,
1. Определение перемещен
 |
ия x1, плиты за время от t0 = 0 до t = t1,.
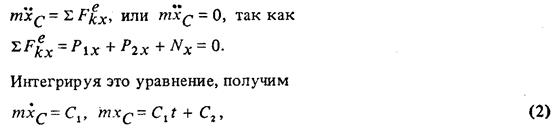 |
Решение. Рассмотрим механическую систему, состоящую из плиты и груза. Изобразим действующие на нее внешние силы: силы тяжести P1, Р2 и суммарную реакцию N направляющих. Проведем координатные оси ху так, чтобы ось у прошла через начальное положение центра масс плиты. Для определения x 1 воспользуемся теоремой о движении центра масс С системы и составим дифференциальное уравнение его движения в проекции на ось х, обозначая массу системы через т:
где С1 и С2 – постоянные интегрирования.
Из формулы, определяющей абсциссу xC центра масс, следует, что для рассматриваемой системы m xC = ml x + т2 xD, где х – абсцисса центра масс плиты, определяющая одновременно ее положение, xD — абсцисса груза D. Из рис. Д2а видно, что xD = х -  sin φ, где
sin φ, где

В результате, найдя значение тxC и подставив его в (2), получим

 |
Для определения постоянных С1 и С2 понадобится еще одно уравнение, которое получим, продифференцировав обе части равенства (4) по времени; это даст:
где  = и – скорость плиты. По начальным условиям при t = 0 х = 0, = и0 = 0. Подставив эти величины в равенства (5) и (4), получим С1 = 0, С2 = -m2 . При найденных значениях С1 и С2 из равенства (4) окончательно получим:
= и – скорость плиты. По начальным условиям при t = 0 х = 0, = и0 = 0. Подставив эти величины в равенства (5) и (4), получим С1 = 0, С2 = -m2 . При найденных значениях С1 и С2 из равенства (4) окончательно получим:

Этот результат дает зависимость x от t. Полагая здесь t = t1 = 2 с, найдем искомое перемещение х1. Oтвет: x1 = – 0,4 м (плита переместится влево).
 2. Определение скорости и1. При тех же условиях (1) найдем скорость и1 плиты в момент времени t1 = 2с.
2. Определение скорости и1. При тех же условиях (1) найдем скорость и1 плиты в момент времени t1 = 2с.
Решение. Рассматриваем опять механическую систему, состоящую из плиты и груза, и изображаем действующие на нее внешние силы  ,
,  и реакцию
и реакцию  ; проводим оси ху (рис. Д2б). Для определения и1, воспользуемся теоремой об изменении количества движения системы, учитывая, что для рассматриваемой системы
; проводим оси ху (рис. Д2б). Для определения и1, воспользуемся теоремой об изменении количества движения системы, учитывая, что для рассматриваемой системы  , где
, где  и
и  количества движения плиты и груза соответственно. Составляя уравнение в проекции на ось х, получим
количества движения плиты и груза соответственно. Составляя уравнение в проекции на ось х, получим  , или
, или  , так как
, так как  Отсюда следует, что
Отсюда следует, что  или
или
 (6)
(6)
Для определения vDx рассмотрим движение груза как сложное, считая его движение по отношению к плите относительным, а движение самой плиты – переносным движением.
Тогда  , где численно vпер= u и vотн =
, где численно vпер= u и vотн =  . Покажем вектор
. Покажем вектор  omн на рис. Д2б, направив его перпендикулярно BD в сторону положительного отсчета s или φ, и определим проекцию вектора D на ось х; получим vDx = = их – v отн cosφ, где
omн на рис. Д2б, направив его перпендикулярно BD в сторону положительного отсчета s или φ, и определим проекцию вектора D на ось х; получим vDx = = их – v отн cosφ, где

В данной задаче vDx можно еще найти, определив абсциссу точки D, т. е. xD = х - sinφ (рис. Д2а); тогда  , где
, где  , а значение cos φ дает равенство (7).
, а значение cos φ дает равенство (7).
При найденном значении νDx равенство (6), если учесть, что  x = , а
x = , а  , примет вид
, примет вид

По начальным условиям при t = 0 и = 0, что дает С1 = 0, и окончательно из (8) находим
Этот результат определяет зависимость и от t. Полагая здесь t =t1 = 2 с, найдем искомую скорость u1.
Ответ: u1 = – 0,48 м/с (скорость направлена влево).
3. Определение реакции N 1. При тех же условиях (1) найдем реакцию N 1 направляющих в момент времени t1 = 2 с.
Решение. Опять рассмотрим механическую систему, состоящую из плиты и груза D, и изобразим действующие на нее внешние силы , и реакцию (рис. Д2а). Для определения N 1 воспользуемся теоремой о движении центра масс системы и составим дифференциальное уравнение его движения в проекции на ось у:

где т – масса системы; Р1 = m1g; P2 = m2g. Из формулы, определяющей ординату yC центра масс системы, следует, что для рассматриваемой системы myC = m 1yC1 + m2yD, где, как видно из рис. Д2а, yC1 = h, yD =2h - cos φ. Тогда, используя равенство (7), получим:

Вычисляя производные и учитывая, что h = const, получим:

Подставив это значение m  в равенство (9), найдем зависимость N от t и из нее, полагая t = t1 = 2с, определим искомую величину N1.
в равенство (9), найдем зависимость N от t и из нее, полагая t = t1 = 2с, определим искомую величину N1.
Ответ: N1 = 197,3 Н.
 4. Определение угловой скорости
4. Определение угловой скорости  . Плита вращается вокруг оси z, лежащей в плоскости плиты (рис. Д2в), и в момент времени t0 = 0, когда угловая скорость плиты равна ω0, на нее начинает действовать вращающий момент М.
. Плита вращается вокруг оси z, лежащей в плоскости плиты (рис. Д2в), и в момент времени t0 = 0, когда угловая скорость плиты равна ω0, на нее начинает действовать вращающий момент М.
Дано: дополнительно к условиям (1): ω0 = 5 с-1, М = kt, где к = 10 Нм/с.
Определить: ω = f(t) – зависимость угловой скорости плиты от времени.
Решение.
Рассмотрим механическую систему, состоящую из плиты и груза D, и изобразим действующие на нее внешние силы: силы тяжести , , реакции  и
и  подпятника и подшипника и вращающий момент М. Для определения ω применим теорему об изменении кинетического момента системы относительно оси z. Предварительно заметим, что так как силы и параллельны оси z, а реакции и эту ось пересекают, то их моменты относительно оси z равны нулю. Тогда ∑mz (Fke) = М = kt и теорема дает
подпятника и подшипника и вращающий момент М. Для определения ω применим теорему об изменении кинетического момента системы относительно оси z. Предварительно заметим, что так как силы и параллельны оси z, а реакции и эту ось пересекают, то их моменты относительно оси z равны нулю. Тогда ∑mz (Fke) = М = kt и теорема дает

Умножая обе части этого уравнения на d t и интегрируя, получим:

Для рассматриваемой механической системы

где Кz пл и KzD – кинетические моменты относительно оси z плиты и груза D соответственно. Поскольку плита вращается вокруг оси z, то

Для определения KzD рассмотрим движение груза как сложное, считая его движение по отношению к плите относительным, а вращение плиты вокруг оси z – переносным движением. Тогда , и по теореме Вариньона

Но вектор  0TH лежит в одной плоскости с осью z и, следовательно, mz(m2 OTH) = 0. Вектор пер направлен перпендикулярно плите (как ось х, если ось у в плоскости плиты); по модулю v пер = DD1.
0TH лежит в одной плоскости с осью z и, следовательно, mz(m2 OTH) = 0. Вектор пер направлен перпендикулярно плите (как ось х, если ось у в плоскости плиты); по модулю v пер = DD1.
 Тогда mz(m2 nep ) = m2vnep DD1 = m2ω (DD1)2. Но из рис. Д2в видно, что DD1 = + sinφ. Взяв значение sinφ из формулы (3) и подставив все найденные величины в равенство (14), получим:
Тогда mz(m2 nep ) = m2vnep DD1 = m2ω (DD1)2. Но из рис. Д2в видно, что DD1 = + sinφ. Взяв значение sinφ из формулы (3) и подставив все найденные величины в равенство (14), получим:
Зная Кzпл и КzD [формулы (13) и (15)], найдем из равенства (12) значение Kz,тогда уравнение (11) примет вид

или при числовых значениях задачи

Постоянную интегрирования определим по начальным условиям: при t = 0 ω = ω0 = 5с-1; получим С1 = 128. При этом значении С1 из уравнения (16) находим искомую зависимость ω от t.
Ответ:

Примечание. Из полученного результата можно найти и значение ω 1 при t = t1. Но если по условиям задачи одновременно М = 0, то уравнение (10) дает Kz = const, и тогда обычно проще не искать зависимость ω от t в общем виде, а сначала определить положение груза D при t = 0, (т. е. угол φ0) и вычислить значение Kz 0 при φ = φ0 и ω = ω0 с помощью равенств, аналогичных (11) – (15); затем определить положение груза при t = t1 (угол φ1) и тем же путем найти Kz1 при φ = φ1 и ω = ω1.
Так, в рассмотренном примере при t = 0 будет φ0 =  /2 и DD1 = 2 (рис Д2в), а при t = t1 =2 с будет φ1 = - /6 и DDl= /2. Тогда
/2 и DD1 = 2 (рис Д2в), а при t = t1 =2 с будет φ1 = - /6 и DDl= /2. Тогда

Значение ω 1 находится из равенства Kz1 = Kz0.
Задача ДЗ
Теоремой об изменении кинетической энергии удобнее всего пользоваться в тех случаях, когда движущаяся система является неизменяемой, т. е. расстояния между точками системы остаются неизменными (частным случаем такой системы является абсолютно твердое тело). В этом случае теорема позволяет исключить из рассмотрения все неизвестные внутренние силы, а при идеальных, не изменяющихся со временем связях, – и наперед неизвестные реакции внешних связей. Эту теорему целесообразно применять также в тех случаях, когда в число данных и искомых величин входят: действующие силы системы, совершающие работу, начальные и конечные скорости точек или тел системы (линейные и угловые) и их перемещения. Неизвестна какая-нибудь одна величина и ее нужно определить. При этом действующие силы должны быть постоянными или зависеть только от перемещений (расстояний).
Решение задачи с помощью теоремы об изменении кинетической энергии системы рекомендуется проводить в такой последовательности.
1. Изобразить систему в текущий момент времени и показать на рисунке все внешние и внутренние силы, действующие на систему (при неизменяемой системе – только внешние силы).
2. Записать теорему об изменении кинетической энергии системы.
3. Вычислить кинетическую энергию системы материальных точек в начальном и конечном положениях.
4. Вычислить сумму работ всех внешних и внутренних сил на перемещениях точек системы (в случае неизменяемой материальной системы – только сумму работ внешних сил).
5. Воспользовавшись результатами вычислений пунктов 3 и 4, составить уравнение теоремы об изменении кинетической энергии системы.
6. Из полученного уравнения находим искомые неизвестные величины.
Механическая система состоит из грузов 1 и 2 (коэффициент трения грузов о плоскость f = 0,1), цилиндрического сплошного однородного катка 3 и ступенчатых шкивов 4 и 5 с радиусами ступеней R4 = 0,3 м, r4 = 0,1 м, R5 = 0,2 м, r5 = 0,1 м (массу каждого шкива считать равномерно распределенной по его внешнему ободу) (рис. Д3.0 – ДЗ.9, табл. ДЗ). Тела системы соединены друг с другом нитями, намотанными на шкивы; участки нитей параллельны соответствующим плоскостям.


Под действием силы F = f(S), зависящей от перемещения точки приложения силы, система приходит в движение из состояния покоя. При движении системы на шкивы 4 и 5 действуют постоянные моменты сил сопротивлений, равные соответственно M4 и M5.
Определить значение искомой величины в тот момент времени, когда перемещение точки приложения силы F равно s1. Искомая величина указана в столбце "Найти" таблицы, где обозначено: v 1 –скорость груза 1, vC3 –скорость центра масс катка 3, ω4 –угловая скорость тела 4 и т. д.
Указания. Задача ДЗ – на применение теоремы об изменении кинетической энергии системы. При решении задачи учесть, что кинетическая энергия системы равна сумме кинетических энергий всех входящих в систему тел: эту энергию нужно выразить через ту скорость (линейную или угловую), которую в задаче надо определить. При вычислении кинетической энергии катка, движущегося плоскопараллельно, для установления зависимости между его угловой скоростью и скоростью его центра масс воспользоваться понятием о мгновенном центре скоростей (кинематика). При определении работы все перемещения следует выразить через заданное перемещение s1, учитывая, что зависимость между перемещениями здесь будет такой же, как между соответствующими скоростями. Если по данным таблицы т2 = 0, груз 2 на чертеже не изображать; шкивы 4 и 5 всегда входят в систему.
Пример Д3.
Механическая система (рис. ДЗ) состоит из сплошного цилиндрического катка 1, ступенчатого шкива 2 с радиусами ступеней R2 и r2 (масса шкива равномерно распределена по его внешнему ободу) и груза 3(коэффициент трения груза о плоскость равен f). Тела системы соединены друг с другом нитями, намотанными на шкив 2.
 Под действием силы F = f(s), зависящей от перемещения s точки ее приложения, система приходит в движения из состояния покоя. При движении на шкив 2 действует постоянный момент М2 сил сопротивления.
Под действием силы F = f(s), зависящей от перемещения s точки ее приложения, система приходит в движения из состояния покоя. При движении на шкив 2 действует постоянный момент М2 сил сопротивления.
Дано: m1 = 4 кг, т2 = 10 кг, т3 = 8 кг, R2 = 0,2 м, r2 = 0,1 м, f = 0,2, М2 = 0,6 Н.м, F = = 2(1 + 2s) Н, s1 = 2 м.
Определить: скорость vC1, центра масс катка, когда s = s1
Решение. 1. Рассмотрим движение неизменяемой механической системы, состоящей из тел 1, 2, 3, соединенных нитями. Изобразим все действующие на систему внешние силы: активные  ,момент сопротивления М2 реакции
,момент сопротивления М2 реакции  и силы трения
и силы трения  ,
,  .
.
Для определения vCl воспользуемся теоремой об изменении кинетической энергии системы

2. Определяем Т0 и Т. Так как в начальный момент система находилась в покое, то Т0 = 0. Величина Т равна сумме энергий всех тел системы:
 Учитывая, что тело 1 движется плоскопараллельно, тело 3 – поступательно, а тело 2 вращается вокруг неподвижной оси, получим:
Учитывая, что тело 1 движется плоскопараллельно, тело 3 – поступательно, а тело 2 вращается вокруг неподвижной оси, получим:

Все входящие сюда скорости следует выразить через искомую vC1. Приняв во внимание, что точка К1 – мгновенный центр скоростей катка 1, и обозначив радиус катка через r1, получим:

Кроме того, входящие в (3) моменты инерции имеют значения:

Подставив все величины (4) и (5) в равенство (3), а затем используя равенство (2), получим окончательно:

3. Теперь найдем сумму работ всех действующих внешних сил при том перемещении, которое будет иметь система, когда точка С1 пройдет путь s1. Одновременно все перемещения следует выразить через заданную величину s1, для чего учтем, что здесь зависимость между перемещениями будет такой же, как и между соответствующими скоростями в равенствах (4), т. е. φ2 = s1/R2 s3 =s1(r2 /Rг). В результате получим:

Работа остальных сил равна нулю, так как точка K1, где приложены  , и
, и  – мгновенный центр скоростей, точка О, где приложены и
– мгновенный центр скоростей, точка О, где приложены и  , неподвижна, а реакция
, неподвижна, а реакция  перпендикулярна перемещению груза 3. Тогда окончательно
перпендикулярна перемещению груза 3. Тогда окончательно

4. Подставив выражения (6) и (7) в уравнение (1) и учитывая, что Т0 = 0, получим

При числовых значениях, которые имеют заданные величины, равенство (8) дает 9v2Cl = 21,1. Отсюда находим искомую скорость. Ответ: vC1 = 1.53 м/с.
Задача Д4
Вертикальный вал АК (рис. Д4.0 – Д4.9, табл. Д4), вращающийся с постоянной угловой скоростью ω = 10 с-1, закреплен подпятником в точке А и цилиндрическим подшипником в точке, указанной в табл. Д4 в столбце 2 (АВ = = BD = DE = ЕК = b). К валу жестко прикреплены невесомый стержень 1 длиной 1 = 0,4 м с точечной массой m1 = 6 кг на конце и однородный стержень 2 длиной  = 0,6 м, имеющий массу т2 = 4 кг, оба стержня лежат в одной плоскости.
= 0,6 м, имеющий массу т2 = 4 кг, оба стержня лежат в одной плоскости.

Точки крепления стержней к валу указаны в таблице в столбцах 3 и 4, а углы а и β – в столбцах 5 и 6. Пренебрегая весом вала, определить реакции подпятника и подшипника. При окончательных подсчетах принять b = 0,4 м.

Указания. Задача Д4 – на применение к изучению движения системы принципа Даламбера. При решении задачи учесть, что когда силы инерции частиц тела (в данной задаче стержня 2) имеют равнодействующую –  , то численно RИ = таC, где аC – ускорение центра масс С стержня, но линия действия силы в общем случае не проходит через точку С (см. пример Д4).
, то численно RИ = таC, где аC – ускорение центра масс С стержня, но линия действия силы в общем случае не проходит через точку С (см. пример Д4).
Решение задач с помощью метода кинетостатики рекомендуется выполнять в такой последовательности.
1. Изобразить механическую систему в текущий момент времени.
2. Изобразить на рисунке активные силы, действующие на систему.
3. Освободить систему от связей, заменив действие связей на систему соответствующими реакциями.
4. Добавить к активным силам и реакциям связей силы инерции материальных точек системы.
5. Выбрать систему координат.
6. Составить уравнения “равновесия” системы сил.
7. Решив полученную систему уравнений, определить искомые величины.
Пример Д4
С невесомым валом АВ, вращающимся с постоянной угловой скоростью ω, жестко скреплен стержень OD длиной L и массой m, имеющий на конце груз массой т2 (рис. Д4).
Дано: b1 = 0,6 м, b2 = 0,2 м,  = 30°, = 0,5 м, m1 = 3 кг, тг = 2 кг, ω = 6 с-1.
= 30°, = 0,5 м, m1 = 3 кг, тг = 2 кг, ω = 6 с-1.
Определить: реакции подпятника А и подшипника В.
 Решение. Для определения искомых реакций рассмотрим движение механической системы, состоящей из вала АВ, стержня OD и груза, и применим принцип Даламбера. Проведем вращающиеся вместе с валом оси А ху так, чтобы стержень лежал в плоскости ху, и изобразим действующие на систему внешние силы: силы тяжести , составляющие
Решение. Для определения искомых реакций рассмотрим движение механической системы, состоящей из вала АВ, стержня OD и груза, и применим принцип Даламбера. Проведем вращающиеся вместе с валом оси А ху так, чтобы стержень лежал в плоскости ху, и изобразим действующие на систему внешние силы: силы тяжести , составляющие  ,
,  реакции подпятника и реакцию
реакции подпятника и реакцию  подшипника.
подшипника.
Согласно принципу Даламбера, присоединим к этим силам силы инерции элементов стержня и груза, считая груз материальной точкой. Так как вал вращается равномерно (ω = = const), то элементы стержня имеют только нормальные ускорения  , направленные к оси вращения, а численно апk = ω2 hk, где hk – расстояние элемента от оси. Тогда силы инерции
, направленные к оси вращения, а численно апk = ω2 hk, где hk – расстояние элемента от оси. Тогда силы инерции  будут направлены от оси вращения и численно FkИ = ∆ mапк = = ∆ mω2hk, где ∆ m – масса элемента. Поскольку все пропорциональны hk, то эпюра этих параллельных сил образует треугольник и их можно заменить равнодействующей , линия действия которой проходит через центр тяжести этого треугольника, т. е. на расстоянии H1 от вершины О, где H1 =2/3. H2 (H2 = cos а).
будут направлены от оси вращения и численно FkИ = ∆ mапк = = ∆ mω2hk, где ∆ m – масса элемента. Поскольку все пропорциональны hk, то эпюра этих параллельных сил образует треугольник и их можно заменить равнодействующей , линия действия которой проходит через центр тяжести этого треугольника, т. е. на расстоянии H1 от вершины О, где H1 =2/3. H2 (H2 = cos а).
Но, как известно, равнодействующая любой системы сил равна ее главному вектору, а численно главный вектор сил инерции стержня R1И = т1аC, где аC – ускорение центра масс стержня; при этом, как и для любого элемента стержня, аC = аCn = ω2hC = ω2 OCsin а (ОС = /2). В результате получим
R1И = m1ω2 ( /2) sina = 13,5H.
Аналогично для