Рассматриваемая метрологическая задача сводится к измерению пространственного положения контролируемого объекта относительно некоторой базы. При рабочем расстоянии порядка нескольких метров и более эффективны оптико-электронные измерительные средства на основе явлений волновой и геометрической оптики.
Оптико-электронные системы, использующие явления волновой оптики обладают высокой пороговой чувствительностью - до тысячных долей угловой секунды, однако погрешности измерения вследствие влияния дестабилизирующих факторов (температурные и весовые деформации, флюктуации воздушного тракта) могут достигать единиц и десятков процентов от диапазона измерения, что не позволяет их использовать в рассматриваемой системе.
Для построения измерительных систем второго уровня, выполняющих измерение взаимного углового рассогласования элемента конструкции и корпуса ГСП предлагается использовать автоколлимационный метод измерения как обладающий наибольшей чувствительностью.
В соответствии с методом, на одном из объектов (корпусе ГСП) располагается пассивный контрольный элемент (КЭ) - автоколлимационное зеркало (рисунок 1.4). На втором объекте - (опорном кольце или цапфе) располагается приемно-излучающий блок - автоколлиматор (АК).
При наличии углового рассогласования между объектами происходит отклонение пучка, отраженного от контрольного элемента. Величина угла отклонения пучка, являющаяся мерой углового рассогласования, определяется анализатором приемной системы АК.
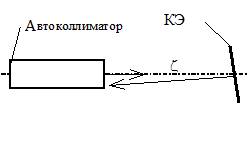
Рисунок 1.4
Для построения измерительных систем третьего уровня, предназначенных для измерения пространственного положения контролируемого объекта, эффективны два метода - так называемой "линейной засечки" и "угловой засечки".
|
|
По методу "линейной засечки" (рисунок 1.5) с трех базовых реперов измеряются расстояния до контролируемой точки.
По известным базовым расстояниям B1,B2,B3 между реперами и измеренным расстояниям L1,L2L3 до контролируемой точки определяются координаты X,Y,Z контролируемой точки.
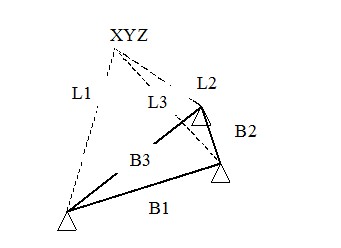
Рисунок 1.5. Метод "линейной засечки"
В основе приборной оптико-электронной реализации метода лежит лазерный дальномер.
По методу "угловой засечки" с двух реперных точек измеряются углы визирования (угол между оптической осью объектива и направлением на точку) контролируемой точки в вертикальной и горизонтальной плоскостях (рисунок 1.6).
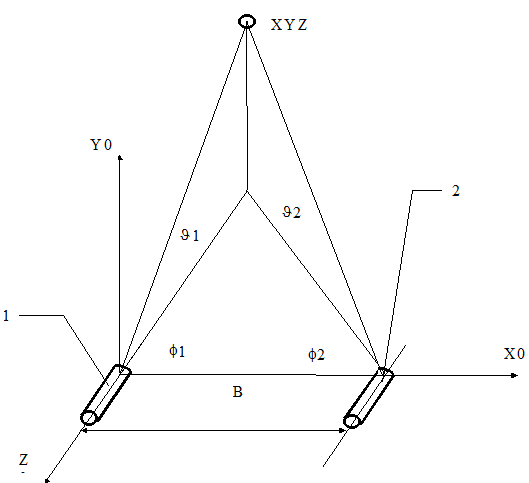
Рисунок 1.6. XYZ0 - оси приборная система координат
По измеренным углам визирования и известной величине базового расстояния B между реперными точками определяются координаты XYZ контролируемой точки в приборной системе координат X0Y0Z0.
В основе приборной реализации метода лежит оптико-электронный теодолит.
При построении рассматриваемой системы предполагается использовать метод "угловой засечки". Проведенный анализ показал, что при одинаковой погрешности измерения требуемая величина баз B1, B2, B3 при реализации метода "линейной засечки" в среднем в 2…3 раза больше (и соизмерима с расстояниями L до контролируемой точки), чем требуемая величина базы B в методе угловой засечки.