ЗАПОМНИТЕ Магнитоэлектрический измерительный механизм
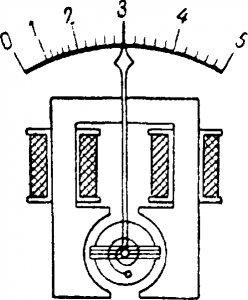
Подвижная часть магнитоэлектрического измерительного механизма (рис. 7-1) состоит из прямоугольной катушки (рамки) В. Обмотка рамки из тонкой изолированной медной проволоки наложена на алюминиевый каркас. На рамке укреплены две полуоси — керны, установленные в опорах. На одной изполуосей. укреплены стрелка и концы спиральных пружин, через которые ток подводится к обмотке рамки.
Боковые стороны рамки расположены в узком воздушном зазоре А между неподвижным стальным цилиндром В и олюсными башмаками N’,S’. Сильный постоянный магнит.
N, S создает в воздушном зазоре однородное радиальное магнитное поле.
На боковые стороны обмотки рамки, расположенные в магнитном поле, при наличии тока в обмотке, будет дейстовать пара сил F, F (рис. 7-2). Таким образом, создаётся
Рис. 7-1. Магнитоэлектрический измерительный механизм.
вращающий момент, пропорциональный току в рамке
M = ƦI
где Ʀ — коэффициент пропорциональности.
Под действием этого момента рамка повернется на угол α, при котором вращающий момент уравновесится противодействующим моментом пружин, Последний пропорционален углу закручивания пружин Mпр = Dα
где D — коэффициент пропорциональности. Из равенства вращающего и противодействующего моментов
Dα = ƦI
находим выражение угла поворота рамки α = (Ʀ / D) I
из которого следует, что угол поворота пропорционален току.
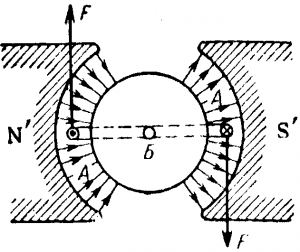
Рис. 7-2. Получение вращающего момента в магнитоэлектрическом измерительном механизме
Ток в катушке измерительного механизма
I = (D/ Ʀ) α = С α,
где С = D/ Ʀ постоянная по току, известная для каждого прибора.
Таким образом, измеряемый ток определяется путем отсчета угла поворота рамки и умножения на постоянную прибора. Отсчет угла производится по указательной стрелке и шкале, укрепленной за концом стрелки.
Успокоителем называется приспособление, предназначенное для уменьшения времени колебаний подвижной части, возникающих после включения прибора.
В магнитоэлектрическом измерительном механизме успокоителем является алюминиевый каркас рамки. При повороте подвижной части изменяется магнитный поток, пронизывающий каркас. В каркасе индуктируются токи, взаимодействие которых с магнитным полем магнита создает тормозной момент, обеспечивающий успокоение.
Рассматриваемый измерительный механизм в связи с малым сечением пружин и проволоки обмотки изготовляется на малые номинальные токи 10—100 ма и меньше.
При включении магнитоэлектрического измерительного механизма рассмотренной конструкции в цепь переменного тока вращающий момент будет изменяться пропорционально мгновенному значению тока. При таком быстром изменении момента вследствие инерции подвижная часть не успеет следовать за изменением момента и она отклонится на угол, пропорциональный среднему за период значению вращающего момента. При синусоидальном токе среднее значение тока, а следовательно, и момента равно нулю и подвижная часть не отклонится. Таким образом, рассмотренный измерительный механизм пригоден только для измерений в цепи постоянного тока.
Электромагнитный измерительный механизм
Электромагнитный измерительный механизм показан на рис. 7-3. Он состоит из неподвижной катушки А и подвижной части — стального сердечника Б, указательной стрелки, пружины и секторообразного алюминиевого листка В успокоителя, укрепленных на одной оси. Измеряемый ток, проходя по неподвижной катушке, создает магнитное пате, которое намагничивает сердечник Б и втягивает его внутрь катушки. По углу поворота сердечника определяют величину тока в катушке.
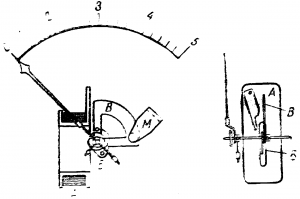
Рис. 7-3. Электромагнитный измерительным механизм
При движении листка В успокоителя в магнитном поле Магнита М в нем индуктируются вихревые токи. Взаимодействием этих токов с полем магнита создается тормозной момент, обеспечивающий успокоение.
Электромагнитный измерительный механизм применим для цепей постоянного и переменного тока, так как втягивание сердечника в катушку не зависит oт направления тока.
Вследствие влияния остаточной индукции сердечника втягивание сердечника, а следовательно, и показание измерительного механизма может быть различным при одинаковых значениях тока при увеличении тока и при уменьшении его. Следовательно, возможна погрешность от остаточной индукции. Для уменьшения этой погрешности сердечники изготовляют из пермаллоя, остаточная индукция которого ничтожна.
 Для уменьшения погрешности от внешних полей измерительный механизм окружают стальными экранами или кожухами. Для той же цели применяют астатические измерительные механизмы с двумя последовательно соединенными катушками и соответственно с двумя сердечниками на одной оси. Измеряемый ток создает в катушках поля противоположного направления. Внешнее однородное поле уменьшает магнитное поле одной катушки и настолько же увеличивает поле второй катушки, таким образом, результирующее влияние внешнего поля будет ничтожным.
Для уменьшения погрешности от внешних полей измерительный механизм окружают стальными экранами или кожухами. Для той же цели применяют астатические измерительные механизмы с двумя последовательно соединенными катушками и соответственно с двумя сердечниками на одной оси. Измеряемый ток создает в катушках поля противоположного направления. Внешнее однородное поле уменьшает магнитное поле одной катушки и настолько же увеличивает поле второй катушки, таким образом, результирующее влияние внешнего поля будет ничтожным.
Вопросы для ответов в письменной форме:
1 Измерительный механизм из чего состоит?
2Каким образом, измеряемый ток определяется?
3.Электромагнитный измерительный механизм применим для каких цепей?
Рекомендуемое время работы – 1 час.20 мин
ТЭ 3-17 18.04.2020 субота1,2 урок
Каблуков.С.Г. kabiukovS@mail.ru
Тема:: Измерительные механизмы приборов Электродинамический измерительный механизм.Ферродинамический измерительный механизм.
Цель: Данная тема предназначена для приобретения практического опыта для обслуживания электрооборудования электрических станций и сетей.
Теоретический материал: Измерительные механизмы приборов. Электродинамический измерительный механизм.Ферродинамический измерительный механизм.
ВАЖНО! Электродинамический измерительный механизм
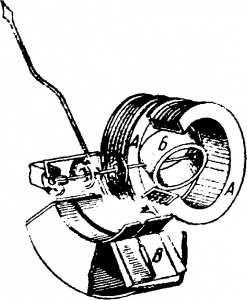
Электродинамический измерительный механизм (рис. 7-4 и 7-5)состоит из двух катушек — неподвижной А, имеющей две секции, и подвижной Б., укрепленной на одной оси с указательной стрелкой, крылом В воздушного успокоителя и двумя спиральными пружинами.
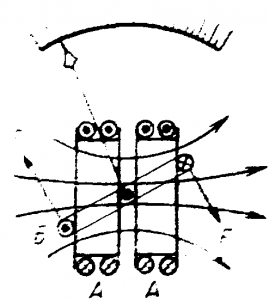
При прохождении тока I 1по неподвижной катушке и тока I 2 по подвижной катушке между ними возникает электродинамическое взаимодействие. В результате на подвижную катушку будет действовать пара сил FF (риc. 7-5), т. е. вращающий момент. Поворот подвижной катушки происходит до тех пор, пока вращающий момент не уравновесится противодействующим моментом пружин.
При постоянном токе вращающий момент и угол поворота подвижной катушки пропорциональны произведению токов в катушках
α = Ʀ 1 I 1 I 2
 При переменном токе мгновенный вращающий момент пропорционален произведению мгновенных значений токов, а средний за период вращающий момент и пропорциональный ему угол поворота подвижной катушки определяются произведением действующих значений токов в катушках и косинусу угла сдвига между ними, т.е.
При переменном токе мгновенный вращающий момент пропорционален произведению мгновенных значений токов, а средний за период вращающий момент и пропорциональный ему угол поворота подвижной катушки определяются произведением действующих значений токов в катушках и косинусу угла сдвига между ними, т.е.
α = Ʀ 1 I 1 I 2 cosΨ
Рис. 7-4. Электродинамический измерительный механизм.
До этому углу поворота, как будет показано ниже, определяют значение измеряемой величины.
Отсутствие стали в измерительном механизме, а следовательно, и погрешности от остаточной индукции обеспечивают возможность изготовить эти механизмы для измерений высокой точности.
Для уменьшения погрешностей от внешних магнитных полей, обусловленных слабым магнитным полем измерительного механизма, применяются те же средства, что и для электромагнитных измерительных механизмов.
 Слабому магнитному полю соответствует слабый вращающий момент и, следовательно, для получения высокой точности необходимо уменьшить погрешность от трения. Это достигается уменьшением веса подвижной части и безупречной обработкой осей и опор. Кроме того, поперечное сечение пружин и провода подвижной катушки мало, поэтому электродинамический измерительный чувствителен к перегрузке.
Слабому магнитному полю соответствует слабый вращающий момент и, следовательно, для получения высокой точности необходимо уменьшить погрешность от трения. Это достигается уменьшением веса подвижной части и безупречной обработкой осей и опор. Кроме того, поперечное сечение пружин и провода подвижной катушки мало, поэтому электродинамический измерительный чувствителен к перегрузке.
Рис. 7-5. Получение вращающего момента вэлектродинамическом измерительном механизме.