Пример 1. Кривошип О1О = l вращается вокруг оси, проходящей через точку О 1, и имеет в данный момент угловую скорость w и угловое ускорение e (рис. 33, а). На палец О этого кривошипа свободно насажано колесо 1 радиуса r, которое катится при этом без скольжения по неподвижному колесу радиуса
R = l – r.
Найти в данный момент времени угловую скорость w I и угловое ускорение eI колеса 1, скорости и ускорения точек А и В.

Решение
Механизм состоит из двух тел: кривошип О 1 О - совершает вращательное движение и колесо 1 совершает плоскопараллельное движение.
Для решения задачи надо рассмотреть движение колеса I. По данным задачи легко найти скорость` u 0 и ускорения` a 0 точки О этого колеса, которую и примем за полюс.
Определение` u 0 и` a 0. Зная w и e кривошипа, находим:
u0 = w О1О = w l,
 .
.
Направления векторов  и
и  определяются направлением w и e, вектор
определяются направлением w и e, вектор  направлен от O к O 1. Показываем их на рисунке.
направлен от O к O 1. Показываем их на рисунке.
Определение wI,` υА, ` υB. Точка Р зацепления колес является МЦС для шестерни 1; следовательно, угловая скорость шестерни I равна:
 (a)
(a)
а направление w I определяется направлением` υ о.
Зная w I и МЦС колеса I, находим скорости точек А и В:
Векторы ` υА и `υB направлены перпендикулярно к АР и ВР и их направления определяются направлением wI.
Определение eI. Так как в выражении (а) величина ОР=r остается постоянной при любом положении колеса 1, то
 .
.
и` υ0 направлены в разные стороны, так как вращение колеса 1 замедленное,  направлено противоположно w1.
направлено противоположно w1.
Определение ускорений точек А и В. Перейдя к колесу 1, приняв точку О за плюс, имеем:
 (б)
(б)
 (в)
(в)
Находим:
Векторы  и
и  направлены от рассматриваемых точек к полюсу, а векторы
направлены от рассматриваемых точек к полюсу, а векторы  и
и  перпендикулярны им, и их направления определяются направлением e I (рис. 33).
перпендикулярны им, и их направления определяются направлением e I (рис. 33).
Изображаем на рисунке все векторы, из которых слагаются ускорения точек А и В, и спроецировав (б) и (в) на оси координат, получим:



Ответ:

Пример 2.Механизм состоит из стержней 1, 2, 3, 4 и ползуна В, соединенных друг с другом и с неподвижными опорами О1 и О2 шарнирами (рис. 34), точка Д находится в середине стержня 2.
 Длины стержней равны соответственно: l 1=0,4 м; l 2=1,2 м; l 3=1,4 м;
Длины стержней равны соответственно: l 1=0,4 м; l 2=1,2 м; l 3=1,4 м;
l 4=0,6 м. Для положения механизма, показанного на рисунке, по известной угловой скорости w 1=2 c -1 угловому ускорению e 1=4 c -2 стержня О1А в данный момент времени найти скорости ` υB и `uЕ точек B и E, угловую скорость wAB и угловое ускорение eAB звена AB, а также ускорение  точки B.
точки B.
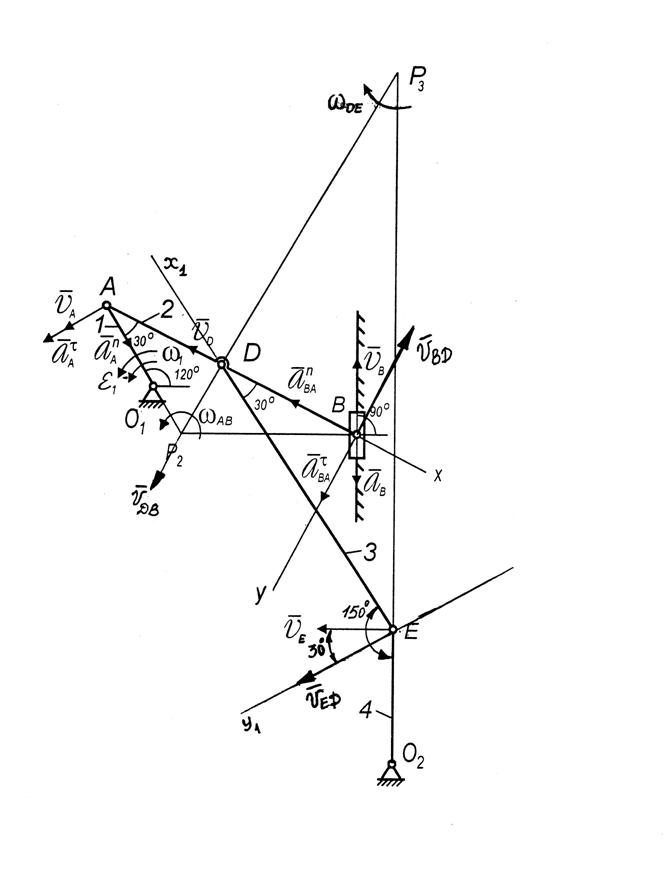 Рисунок 34
Рисунок 34
Расчетная схема
Решение
I. Механизм образуют 4 тела: 1 – О1А – совершающее вращательное движение; 2 – АВ – плоскопараллельное движение; 3 – ДЕ – плоско - параллельное движение; 4 – О 2 Е – вращательное движение. Начинаем с рассмотрения движения тела 1, найдем  . Это точка принадлежит телу О 1 А, совершающему вращательное движение, поэтому υB. скорость точки А равна
. Это точка принадлежит телу О 1 А, совершающему вращательное движение, поэтому υB. скорость точки А равна
 ,
,
направление ` υA определяется направлением w1.
Для определения ` υB воспользуемся теоремой о проекции скоростей двух точек стержня АВ на прямую, соединяющую точки А и В. Скорость ` υB направлена вдоль направляющих. Находим:
υA cos 600= υB cos 600, отсюда υB = υA = 0,8 м/с.
Определение wAB. Для этого находим МЦС – Р2 звена АВ, восстанавливая из точек А и В перпендикуляры к` υA и` υB. Находим AP2 = AD/cos 300=0,69 м, и wAB=υA / AP 2=1,16 c-1. Направление wAB определяется направлением υA.
Определение ` υE. Точка E принадлежит стержню ДЕ. Следовательно, для определения ` υE надо предварительно найти ` υД. Так как точка Д принадлежит одновременно стержню АВ, то υД = wAB ДР 2 = (υA/AP 2) ДР 2 = 0,40 м/с.
 Вектор υД перпендикулярен отрезку Р2Д и направлен в соответствии с направлением wАВ.
Вектор υД перпендикулярен отрезку Р2Д и направлен в соответствии с направлением wАВ.
Так как точка Е принадлежит одновременно стержню О2Е, вращающемуся вокруг точки О2, то ` υE┴ O2E. Е одновременно принадлежит и ДЕ, поэтому восстанавливая из точек Д и Е перпендикуляры к ` υE и ` υД, получаем МЦС Р3 звена ДЕ. Так как ÐДЕР3=ÐДР3Е =300, то D ДР 3 Е равнобедренный. Составив пропорцию, находим, что
 .
.
По направлению` υД определяем направление поворота стержня ДЕ (wДЕ), вектор` υЕ будет направлен в сторону поворота этого стержня перпендикулярно к Р3Е.
Определение  . Находим сначала ускорение точки А
. Находим сначала ускорение точки А

Вектор  направлен вдоль AO 1, а
направлен вдоль AO 1, а  – перпендикулярно АО 1; изображаем эти векторы на рисунке.
– перпендикулярно АО 1; изображаем эти векторы на рисунке.
Приняв А за полюс и применяя теорему об ускорении к В, получим

Находим  . Вектор
. Вектор  направлен от В и А. Вектор
направлен от В и А. Вектор  направлен перпендикулярно АВ (конкретное направление выберем предположительно). Изображаем на рисунке эти векторы.
направлен перпендикулярно АВ (конкретное направление выберем предположительно). Изображаем на рисунке эти векторы.
Для нахождения  последнее векторное равенство спроецируем на ось х, перпендикулярную
последнее векторное равенство спроецируем на ось х, перпендикулярную  .
.
Так как точка В одновременно принадлежит и ползуну, имеющему направляющие, то предполагаем, что  направлен вниз.
направлен вниз.

Отсюда, подставляя числовые значения всех величин, находим  = -2,05 м/с2. Знак минус указывает, что вектор направлен в сторону, противоположную указанному на рисунке.
= -2,05 м/с2. Знак минус указывает, что вектор направлен в сторону, противоположную указанному на рисунке.
Определение eАВ. Для определения eАВ сначала определим  . Для этого последнее векторное равенство спроецируем на ось Вy:
. Для этого последнее векторное равенство спроецируем на ось Вy:

Отсюда находим = -3,96 м/с2. Знак указывает, что  направлен противоположно показанному на рисунке.
направлен противоположно показанному на рисунке.
Из равенства  = eАВ l 3 определяем
= eАВ l 3 определяем
 .
.
Так как < 0, то eAB направлено против направления движения часовой стрелки (противоположно первоначально предполагаемому направлению).
Ответ: υВ =0,8 м/с, υЕ =6,93 м/с, wАВ =1,16 с-1, eАВ =3,3 с-2, =2,05 м/с2.
 Пример 3.К кривошипу, равномерно вращающемуся вокруг оси О с угловой скоростью wОА = 4 с-1, прикреплен шатун АВ с коромыслом ВС (рис. 33). Даны размеры: ОА = r =0,5 м, АВ =2 r, ВС = r Ö2. В положении, изображенном на рисунке, Ð ОАВ =900, Ð АВС =450. Определить для этого положения ускорение точки В, а также угловую скорость и угловое ускорение коромысла ВС и шатуна АВ.
Пример 3.К кривошипу, равномерно вращающемуся вокруг оси О с угловой скоростью wОА = 4 с-1, прикреплен шатун АВ с коромыслом ВС (рис. 33). Даны размеры: ОА = r =0,5 м, АВ =2 r, ВС = r Ö2. В положении, изображенном на рисунке, Ð ОАВ =900, Ð АВС =450. Определить для этого положения ускорение точки В, а также угловую скорость и угловое ускорение коромысла ВС и шатуна АВ.
 |
Рисунок 35
Расчетная схема
Решение
Рассмотрим движение тел, образующих механизм: 1 – ОА – вращательное; 2 – АВ – плоско – параллельное; 3 – ВС – вращательное.
Решение начнем с ОА, найдем 
 .
.
Определение и  . Рассматривая движение шатуна АВ, выберем за полюс точку А, принадлежащую одновременно и кривошипу ОА, совершаемому вращательное движение. Для точки А, так как wОА - const, получаем:
. Рассматривая движение шатуна АВ, выберем за полюс точку А, принадлежащую одновременно и кривошипу ОА, совершаемому вращательное движение. Для точки А, так как wОА - const, получаем:
 = wOA OA = wOA r = 2 (м/с),
= wOA OA = wOA r = 2 (м/с),
 = w2OA OA = w2OA r = 8 (м/с2).
= w2OA OA = w2OA r = 8 (м/с2).
Вектор` υА перпендикулярен ОА, его направление определяется wОА, а вектор  направлен от А к О.
направлен от А к О.
Определение wАВ. В связи с тем, что точка В принадлежит одновременно звену ВС, вектор`υВ перпендикулярен звену ВС. Проводя перпендикуляры к` υ a и` υВ, получаем МЦС звена АВ - РАВ. Из DАРАВВ следует, что АРАВ = АВ =2 r, а поэтому

Направление поворота показано на рисунке.
Ускорение точки В. По теореме об ускорениях точки при плоском движении твердого тела имеем
 .
.
В этом выражении направление и величина неизвестны. Кроме того, неизвестна величина , так как для определения eАВ нельзя воспользоваться приемом, примененным в примере 1 (расстояние до МЦС от точки А не постоянное).
С другой стороны, точка В принадлежит звену ВС, а потому
 .
.
Здесь легко найти  , но нельзя найти величину , так как неизвестно eBC. Приравнивая правые части двух последних векторных равенств, имеем
, но нельзя найти величину , так как неизвестно eBC. Приравнивая правые части двух последних векторных равенств, имеем
 .
.
Здесь будут неизвестными только численные значения величин  и ,
и ,  направления выбираем предположительно. В проекциях на оси это векторное равенство дает два скалярных уравнения, из которых эти неизвестные и определяются.
направления выбираем предположительно. В проекциях на оси это векторное равенство дает два скалярных уравнения, из которых эти неизвестные и определяются.
Предварительно найдем и  .
.
Определение . Зная wАВ, находим
 = w 2АВ AB = 4 (м/с2).
= w 2АВ AB = 4 (м/с2).
Вектор направлен от В к А.
Определение .
Зная υВ находим

 = υ 2B/ BC = 8Ö2 (м/с2).
= υ 2B/ BC = 8Ö2 (м/с2).
Вектор  направлен от В к С.
направлен от В к С.
Определение  и . Для определения спроецируем обе части векторного равенства на оси координат х и у
и . Для определения спроецируем обе части векторного равенства на оси координат х и у
х: cos 450 + cos 450 = ,
у:  .
.
 Подставляя численные значения величин, получаем = - 4Ö2 (м/с2),
Подставляя численные значения величин, получаем = - 4Ö2 (м/с2),  .
.
Знак минус показывает, что вектор  имеет направление, противоположное выбранному, следовательно ` υB (вращение ВС замедленное).
имеет направление, противоположное выбранному, следовательно ` υB (вращение ВС замедленное).
Зная и , находим :

Определение wВС, eВС и εАВ. По известным υB и и  определяем
определяем
wВС = υB / BC = 4 (c-1), eBC=| |/ ВС =8 (с-2),  .
.
Направление wВС определяется направлением ` υB, а eВС – истинным направлением `  ,
,  истинным направлением . Указываем wВС и eВС на рисунке.
истинным направлением . Указываем wВС и eВС на рисунке.
Ответ: wВС = 4 с- 1, wАВ =2 с-1, eАВ = 20 с- 2, eВС = 8 с-2, = 12,65 м/с2.
6 Задачи и вопросы для самоконтроля
1. Скорость груза 1 v =0,5 м/с (рис. 36). Определить угловую скорость подвижного блока 2, если его радиус R =0,1 м. (Ответ: 2,5 с -1).
Рисунок 36
К задаче 1
Рисунок 37
к задаче 2
Рисунок 38
к задаче 3
2. Стержень АВ длиной 80 см движется в плоскости чертежа. В некоторый момент времени точки А и В стержня имеют скорости vA =0,2 м/с, vB =0,6 м/с (рис. 37). Определить угловую скорость стержня. (Ответ: 0,5 с-1).
3. Скорость точки А плоской фигуры АВС vА =2 м/с, угловая скорость
фигуры w =2 рад/с (рис. 38) расстояние АВ= 1,5 м. Определить скорость точки В. (Ответ: 3,61 м/с).
4. Для заданного положения шарнирного четырехзвенника (рис. 39). Определить скорость точки В, если точка А имеет скорость 1 м/с.
(Ответ: 0,577 м/с).
5. Кривошип ОА механизма, вращаясь равномерно, образует в данный момент времени с направлением ОВ угол j =90° (рис. 40). Определить расстояние от мгновенного центра скоростей шатуна АВ до ползуна В. (Ответ: ¥).
6. Определить скорость точки В колеса (рис. 41), если точка А колеса имеет скорость 2 м/с. (Ответ: 1,41 м/с).
Рисунок 39 Рисунок 40 Рисунок 41