Основным моментом анализа исходной САР является установление факта устойчивости системы. Если она неустойчива, то она только по этой причине уже требует коррекции. При устойчивой исходной САР требуется проверка удовлетворения динамических и точностных требований предъявляемых к ней.
Для оценки устойчивости систем используются алгебраические критерии Гурвица и Рауса и частотные методы Михайлова и Найквиста. Принцип всех критериев основан на анализе корней характеристического уравнения, на наличие нулевых и действительных корней, а также комплексных корней, имеющих положительную действительную часть.
Критерий Гурвица.
Формулировка критерия: система автоматического регулирования устойчива, если все коэффициенты однородного дифференциального уравнения замкнутой системы имеют одинаковый знак, а все определители Гурвица больше нуля. Пусть характеристическое уравнение замкнутой системы имеет вид
 . (1)
. (1)
Для коэффициентов уравнения (1) составляют квадратную матрицу, содержащую n строк и m столбцов. По диагонали от левого верхнего до правого нижнего углов выписывают все коэффициенты от an- 1 до a 0. Каждую строчку дополняют коэффициентами с убывающими слева направо индексами так, чтобы чередовались строки с нечетными и четными индексами. В случае отсутствия данного коэффициента и если его номер больше п или меньше нуля, на его месте проставляют нуль.
 . (2)
. (2)
Определители Гурвица составляют по следующему правилу (в соответствии с пунктирными линиями):
 ; (3)
; (3)
 ; (4)
; (4)
 . (5)
. (5)
Последний (n -ый) определитель включает всю матрицу (2), но он может быть выражен через предпоследний определитель Гурвица (Dn-1):
 . (6)
. (6)
Так как в устойчивой системе Dn-1 > 0, то положительность последнего определителя сводится к положительности свободного члена характеристического уравнения a0.
В рассмотренном выше примере передаточная функция разомкнутой системы слежения за соотношением углов поворота приводов главного движения и подачи (рис. 6) имеет следующий вид:
 . (7)
. (7)
Для этого случая передаточная функция замкнутой системы
 , (8)
, (8)
где  – коэффициент усиления разомкнутой системы.
– коэффициент усиления разомкнутой системы.
Характеристическое уравнение имеет вид
 . (9)
. (9)
Пусть параметры системы имеют следующие значения: КУ1 =1.0; КУ2 =10; КТР =10; КД =1.26 рад/с×В; КДос =1.0 В/рад; ТТР =0.003с; ТЯ =0.05с; ТМ =0.15с. Тогда Кр =126 с-1.

В соответствии с критерием Гурвица его определители соответственно равны
 ;
;



Поскольку третий и четвертый определители системы меньше нуля, то замкнутая система не устойчива.
Критерий Михайлова.
Вектор Михайлова, построенный на основании характеристического уравнения замкнутой системы (1) заменой р = jw, описывает на комплексной плоскости годограф Михайлова.
 . (10)
. (10)
Формулировка критерия: система автоматического регулирования устойчива, если годограф Михайлова начинается при w = 0 на положительной действительной полуоси и с увеличением частоты от 0 до ¥ проходит в положите льном направлении (против часовой стрелки) последовательно, нигде не обращаясь в нуль, п квадрантов (п –порядок дифференциального уравнения системы).
Проверим полученное ранее заключение о не устойчивости системы рис.6 с помощью критерия Михайлова. В соответствии с (9)
 . (11)
. (11)
Подставляя в (11) соответствующие числовые значения получим

На основании полученных зависимостей можно построить годограф Михайлова на комплексной плоскости (рис.7)
|
|
Рис.7. Годограф Михайлова для системы слежения за соотношением углов поворота приводов главного движения и подачи
Из анализа поведения годографа видно, что нарушена последовательность обхода квадрантов. Он не прошел через 2-й квадрант, хотя порядок системы равен 4. Это подтверждает ранее полученное заключение о неустойчивости рассматриваемой системы.
Критерий Найквиста.
Отличие частотного критерия Найквиста перед критерием Михайлова является то, что он позволяет судить об устойчивости замкнутой автоматической системы регулирования по характеристикам разомкнутой системы и может быть применен для систем с транспортным запаздыванием без поправок и дополнений.
Формулировка критерия: система автоматического регулирования, устойчивая или нейтрально устойчивая в разомкнутом состоянии, устойчива в замкнутом состоянии, если годограф комплексной частотной характеристики (АФХ) разомкнутой системы при изменении частоты от 0 до ¥ не охватывает на комплексной плоскости точку с координатами (-1; j 0) или охватывает ее на угол kp, где k число корней в правой полуплоскости комплексной плоскости. Для неустойчивой в разомкнутом состоянии системы формулировка критерия несколько сложнее и здесь не рассматривается.
Комплексная частотная характеристика системы может быть получена путем замены р = jw в передаточной функции разомкнутой системы. Она представлена следующим образом
 . (12)
. (12)
Для системы с передаточной функцией (7)
 .
.
Тогда для алгебраической формы записи годографа

На основании полученных выражений любым из известных методов, например с помощью пакета программ Mapl или в ручную, можно построить в комплексной плоскости соответствующий годограф (см. рис. 8). Диапазон изменения частоты следует выбирать исходя из значений постоянных времени, например 1/Т1<w<1/T3.
Из анализа годографа Найквиста видно, что он охватывает точку с координатами (-1, j0). Это подтверждает ранее полученное заключение о неустойчивости рассматриваемой системы.
|
|

Рис.8. Годограф Найквиста для системы слежения за соотношением углов поворота приводов главного движения и подачи
Критерий, основанный на логарифмических
частотных характеристиках
В практике расчета простых одномерных стационарных систем, являющихся объектом исследования данной контрольно-курсовой работы, широкое распространение получили инженерные методы, основанные на использовании логарифмических частотных характеристик (ЛЧХ) [1 - 3, 5 - 8]. Эти методы позволяют в процессе синтеза корректирующего устройства определить как его структуру, так и параметры. Они снабжены большим количеством удобных номограмм, графиков и зависимостей, позволяющих быстро производить приближенный анализ и синтез линейных САУ.
Пусть, например, требуется провести анализ исходной системы (рис.5), например, с помощью частотного метода, основанного на логарифмических частотных характеристиках системы [6]. Передаточная функция разомкнутой системы примет вид
 (13)
(13)
Пусть параметры системы имеют следующие значения: КУ1 =1.0; КУ2 =10; КТР =10; КД =1.26 рад/с×В; КДос =1.0 В/рад; ТТР =0.003с; ТЯ =0.05с; ТМ =0.15с. Тогда Кр =126.
Построенная в асимптотах ее логарифмическая амплитудно- фазо-частотная характеристика (рис. 9) позволяет сделать вывод, что система минимально-фазовая с разомкнутой частью, находящейся в близи границы устойчивости, запасы по модулю и фазе отсутствуют L1(w). Это требует проведения соответствующей коррекции. Интересно заметить, что уменьшение коэффициента усиления до Кр =12 приводит ее в устойчивое состояние (L2(w)) с запасами по модулю DL=15.6 дБ и по фазе j= 32°. Однако, как будет показано ниже (п. 5.2) в результате этого снижается точность регулирования до с0=1(1+Кр)=0.077, что является совершенно не допустимым.
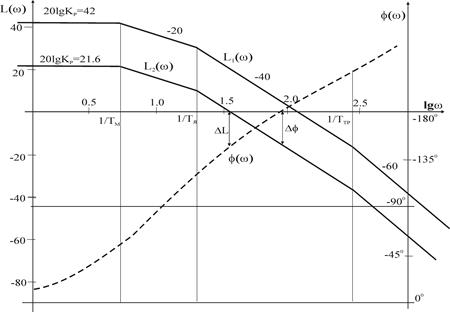
Рис. 9. Логарифмические частотные характеристики исходной разомкнутой системы в асимптотах
Несколько более высокую точность позволяет получить построение ЛАЧХ с помощью прикладных пакетов программ, например Mapl, для статической системы с Кр =126 см. рис.10.

Рис. 10. Логарифмические частотные характеристики исходной разомкнутой системы