Автоматические регулирующие устройства
Чтобы обеспечить качественный процесс регулирования необходимо знать типы, свойства и возможности автоматических регуляторов (АР).
Имея сведения о свойствах объекта регулирования и и зная возможности АР можно спроектировать САР, которая обеспечит выполнение поставленной задачи.
Типы автоматических регуляторов
Применяемые в настоящее время в промышленности автоматические регуляторы можно классифицировать по ряду наиболее характерных признаков:
1. По назначению (виду регулируемой величины):
- регуляторы одной регулируемой величины (температуры, давления, состава);
- универсальные регуляторы.
2. По способу действия (т.е. характеру воздействия на регулирующий орган):
- регуляторы прямого действия, которые не требуют постороннего источника энергии;
- регуляторы непрямого действия, у которых перемещение регулирующего органа производится за счёт энергии, подводимой извне.
3. По виду регулирования:
- стабилизирующие регуляторы, поддерживающие постоянное во времени значение физических величин;
- программные регуляторы, изменяющие значение регулируемых величин по заданной программе;
- следящие регуляторы, поддерживающие значение регулируемых величин в зависимости от изменения каких-либо других величин;
- самонастраивающиеся регуляторы, поддерживающие оптимальное значение регулируемых величин.
4. По времени действия:
- регуляторы непрерывного действия, у которых при непрерывном изменении регулируемой величины регулирующий орган перемещается непрерывно;
- регуляторы прерывистого (дискретного) действия, у которых при непрерывном изменении регулируемой величины регулирующий орган перемещается периодически только в случае достижения регулируемой величиной определённых значений или при прохождении определённого промежутка времени.
5. По роду используемой энергии:
- электрические регуляторы;
- гидравлические регуляторы;
- пневматические регуляторы:
- комбинированные регуляторы (электропневматические и электрогидравлические).
6. По закону регулирования (характеру регулирующего воздействия):
- позиционные (Поз-закон);
- пропорциональные или статические (П-закон);
- интегральные или астатические (И-закон);
- пропорционально-интегральные или изодромные (ПИ-закон);
- пропорциональные с предварением или пропорционально-дифференциальные (ПД-закон);
- изодромные с предварением или пропорционально-интсгрально-дифференциальные (ПИД-закон).
Классификация регуляторов по назначению (виду регулируемой величины).
АР подразделяются на регуляторы температуры, давления, уровня, частоты вращения, расхода и др.
Классификация регуляторов по принципу действия
По принципу действия (по характеру воздействия на регулирующий орган) автоматические регуляторы подразделяют на регуляторы прямого и непрямого (косвенного) действия.
Регуляторы прямого действия. Это такие регуляторы, в которых регулирующий орган перемещается только за счет энергии, отбираемой измерительным устройством из объекта регулирования.
Пояснение. Такие регуляторы применяются для регулирования отдельных параметров. Они используются в тех случаях, когда по условиям эксплуатации нет необходимости в высокой точности регулирования, а для приведения в действие регулирующего органа не нужно больших усилий и чувствительный элемент обладает необходимой для этого мощностью.
Регуляторы прямого действия дешевы, просты по конструкции, надежны в эксплуатации и не требуют высокой квалификации обслуживающего персонала. Их область применения ограничивается простейшими объектами регулирования с благоприятными динамическими характеристиками.
Пример. Регулятор температуры прямого действия.
Рисунок 3.1. Регулятор прямого действия
а) конструкция регулятора, б) функциональная схема;
Автоматический регулятор (АР) температуры (схема конструкции которого представлена на рис. 3.1,а, а его функциональная схема на рис.3.1,б,) воспринимая изменения регулируемой величины у т (текущее значение температуры) формирует сигнал рассогласования  управляющий регулирующим органом РО с целью изменения регулирующего воздействия хр на объект регулирования.
управляющий регулирующим органом РО с целью изменения регулирующего воздействия хр на объект регулирования.
Пояснение. Назначение элементов регулятора и принцип его действия состоит в следующем.
Измерительное устройство (термобаллон с легкокипящей жидкостью) воспринимает изменение регулируемой величины уТ (температуры) и преобразует его в параметр y’T (давление в манометрической системе), удобный для воздействия на другие элементы. С повышением температуры у т часть жидкости в термобаллоне выкипает и давление в y’T на донышко сильфона увеличивается, т.е. температура уТ преобразуется в давление y’T.
Задающее устройство ЗУ устанавливает параметр узад, соответствующее требуемому протеканию технологического процесса. Установка узад производится вручную Р оператором. В конструкции регулятора роль ЗУ выполняет сжатая пружина, натяжение которой осуществляется витком задания.
Элемент сравнения ЭС (называемый иногда сумматором) вырабатывает сигнал рассогласования  . Конструктивно элемент сравнения выполнен в виде рычага, который воспринимает разность сил давления у’T и yзад вырабатываемых соответственно сильфоном и пружиной.
. Конструктивно элемент сравнения выполнен в виде рычага, который воспринимает разность сил давления у’T и yзад вырабатываемых соответственно сильфоном и пружиной.
Одной из основных особенностей регуляторов прямого действия является то, что они не могут обеспечить постоянным значение регулируемой величины на всех установившихся режимах работы объектов.
Пример. Паровой котел работает в установившемся режиме при минимальном отборе пара Gп ® min. Это означает, что подача воды в котел должна быть минимальной, т.е. питательный клапан КП максимально прикрыт. Поплавок, а значит и уровень Н воды должны занимать некоторое повышенное значение. Напротив, в установившемся режиме при максимальном отборе пара Gп ® max, клапан КП должен быть открыт максимально, что возможно при более низком положении поплавка и уровня. Таким образом данному регулятору присуща падающая статическая характеристика, т.е. он работает с положительной неравномерностью регулирования
Пояснение. Очевидно, если по условиям эксплуатации объектов требуется, чтобы на всех нагрузках регулируемые величины были строго постоянны, подобные регуляторы применяться не могут. Конструктивно у таких регуляторов можно уменьшать величину неравномерности регулирования, но сделать ее равной нулю невозможно. Если к тому же автоматизируемый объект не обладает свойством самовыравнивания, то чрезмерное уменьшение приведет к неустойчивой работе регулятора.
Регуляторы непрямого действия.
Конструкция регулятора непрямого действия и его функциональная схема приведены на рис. 3.2. Если мощности сигнала ∆у недостаточно, для воздействия на регулирующий орган (РО), то используются регуляторы непрямого действия. Для перемещения РО используется исполнительное устройство ИУ, подключающее к регулятору внешний источник электрической энергии Е.
В качестве ИМ используется электромагнитное реле (магнитный пускатель), воздействующий на перемещение регулирующего органа РО.
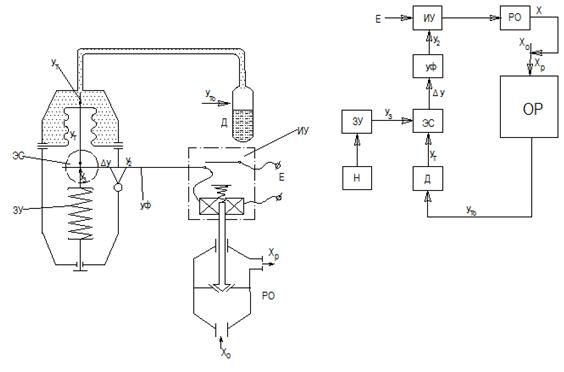
Рисунок 3.2.. Регулятор непрямого действия
а) конструкция регулятора, б) функциональная схема;