Составим каноническую форму микропрограммы синтезируемого операционного устройства (для АУ с естественной адресацией).
| Номер | Метка | Управляющие сигналы | Переход |
| М1 М2 М3 М4 | УЗП УСЧ1 УСДВ УСЧИТ | если Р1, то М1 если Р2, то М3 если Р3, то М3 если Р1, то М3 если Р4, то М4 идти к М2 конец |
Будем считать, что устройство управления решает одну задачу, так что для его построения достаточно иметь ПЗУ, содержащие 10 ячеек. Тогда адрес ячеек ПЗУ будет выражаться четырехразрядным кодом А{3:0}.
Для естественной адресации:
| УЗП | УСЧ1 | УСДВ | УСЧИТ | - | - | - | - | |
| Р1 | Р2 | Р3 | Р4 | А3 | А2 | А1 | А0 |
Первый разряд формата микрокоманды УА с естественной адресацией определяет признак микрокоманды (ПРМК): 0 - операционная микрокоманда, 1 - управляющая микрокоманда.
Установим соответствие между метками и адресами переходов: M1=010=00002, M2=210=00102, M3=610=01102, M4=910=10012
| Адрес | Разряды микрокоманд |
| 1 1000 0000 0 1000 0000 1 0100 0110 0 0100 0000 1 0010 0110 1 1000 0110 1 0001 1001 0 0010 0000 1 0000 0010 0 0001 0000 1 0000 0000 |
Для принудительной адресации микрокоманда может одновременно содержать переходы и управляющие сигналы. Тогда для микрокоманды с принудительной адресацией:
| Номер | Метка | Управляющие сигналы | Переход |
| М1 М2 М3 М4 | УЗП УСЧ1 УСДВ УСЧИТ | если Р1, то М1 если Р2, то М3 если Р3, то М3 если Р1, то М3 если Р4, то М4 идти к М2 конец |
Формат микрокоманды:
| УЗП | УСЧ1 | УСДВ | УСЧИТ | Р1 | Р2 | Р3 | Р4 | А2 | А1 | А0 |
Установим соответствие между метками и адресами переходов: M1=010=0002, M2=210=0102, M3=510=1012, M4=710=01112
Теперь кодовое выражение микропрограммы УУ, используя каноническое описание и формат микрокоманды, может быть записано в следующем виде:
| Адрес | Разряды микрокоманд |
| 0000 1000 000 1000 0000 000 0000 0100 101 0100 0010 101 0000 1000 101 0000 0001 111 0010 0000 010 0001 0000 000 |
Сравнивая объем микропрограмм для управляющих автоматов с естественной и принудительной адресацией, мы убеждаемся в том, что принудительная адресация требует меньшего объема ПЗУ (в нашем случае 11 * 8 = 70 бит), чем естественная адресация (9 * 11 = 99 бит). Таким образом, реализация УА с принудительной адресацией в нашем случае более желательна.
Функциональная схема УА с программируемой логикой

 РМК{5:8} 4
РМК{5:8} 4 


 P1P2P3P4
P1P2P3P4






|
|
|
|
|
|
|

 | |||||||
 |  | ||||||
 | |||||||
10 Р Р
 |
 3
3

 | |||||
 |  | ||||
сброс Анач
Начальный адрес микропрограммы, равный 000, устанавливается сигналом СБРОС, и УА ждет прихода сигнала СТРОБ для продолжения работы.
Построение принципиальной схемы
Будем строить наше устройство на элементах серии K155 и К555, так как они обеспечивают устойчивую работу на заданной тактовой частоте 5 МГц.
Управляющие сигналы S0, S1 обеспечивают запись кода А в регистр (S0 = 1, S1 =1) и сдвиг влево (S0 = 0, S1 = 1), хранения (S0 = 0, S1 = 0).
Их получаем из диаграмм Карно. Диаграммы Карно строятся для управляющих сигналов, воздействующих на регистр, в данном случае это сигналы: УЗП, УСДВ.
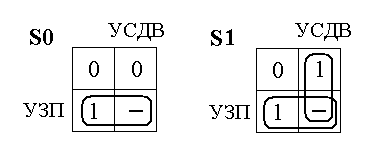


 SE0 = УЗП,
SE0 = УЗП,
SE1 = УЗП + УСДВ = УЗП + УСДВ = УЗП ∙ УСДВ = УЗП / УСДВ
Рассчитаем мощность, потребляемую устройством:
| Элемент | Задержка | Потребляемая мощность |
| К155ЛЕ1 | 22нс | 25 мВт |
| К155ЛА1 | 17нс | 20 мВт |
| К155ТМ2 | 30нс | 156.5 мВт |
| К155ИР13 | 40нс | 609 мВт |
| К155ЛЕ4 | 13нс | 37мВт |
| К155ИЕ19 | 70нс | 535мВт |

Максимальная скорость работы устройства будет определяться временем перехода автомата из состояния а1 в состояние а2, следовательно можно записать:

Максимальная частота: 
Временные диаграммы
ГТИ 
t
 t
t
|
t
|
| |
| |
| |
| |
| |
| |
|
Список литературы
1. Методические указания к выполнению курсовой работы по дисциплине «Вычислительные устройства и микропроцессорная техника».
2. Конспект лекций по курсу «Вычислительные системы и микропроцессорная техника» А.В. Щеглов.