Электрические машины
(базовый курс)
Учебное пособие
Специальность 15.02.07
«Автоматизация технологических процессов и производств»
(для всех форм обучения)
Пермь, 2017
Составитель: кандидат технических наук доцент Хлыбов Александр Борисович
Рекомендовано предметной цикловой комиссией электротехнических дисциплин
Протокол № от 2017г.
Оглавление
| 1. Классификация и принцип действия электрических машин | |
| 2. Машины переменного тока | |
| Асинхронные машины. Основные понятия и область применения | |
| Устройство асинхронного двигателя | |
| Принцип действия и режим работы асинхронного двигателя | |
| Зависимость электромагнитного момента от скольжения | |
| Механическая характеристика асинхронного двигателя | |
| Пуск асинхронных двигателей | |
| Тормозные режимы асинхронных машин | |
| Регулирование частоты вращения асинхронного двигателя | |
| Коэффициент мощности асинхронного двигателя | |
| 3. Машины переменного тока | |
| Синхронные машины. Основные понятия и область применения | |
| Принцип действия и устройство синхронных машин | |
| Характеристики синхронного генератора | |
| Параллельная работа синхронных генераторов | |
| Синхронные двигатели. Принцип действия и устройство | |
| Пуск синхронного двигателя | |
| Потери и КПД синхронных машин | |
| 4. Машины постоянного тока | |
| Основные понятия и область применения | |
| Принцип действия и устройство генератора постоянного тока | |
| Электродвижущая сила машины постоянного тока | |
| Работа генератора постоянного тока | |
| Способы возбуждения генераторов постоянного тока | |
| Двигатели постоянного тока | |
| Регулирование скорости вращения двигателя постоянного тока | |
| Пуск в ход электродвигателей постоянного тока | |
| Механическая характеристика двигателя постоянного тока | |
| Торможение двигателей постоянного тока | |
| 5. Приложения | |
| Приложение 1. Асинхронный двигатель. Пример расчета | |
| Приложение 2. Синхронный генератор. Пример расчета | |
| Приложение 3. Машина постоянного тока. Пример расчета | |
| Приложение 4. Краткая сравнительная характеристика основных типов электрических машин |
1. КЛАССИФИКАЦИЯ И ПРИНЦИП ДЕЙСТВИЯ
ЭЛЕКТРИЧЕСКИХ МАШИН
Электрические машины широко используют на электрических станциях, в промышленности, на транспорте, в авиации, системах автоматического регулирования и управления. Такие машины преобразуют механическую энергию в электрическую, и наоборот.
Машина, преобразующая механическую энергию в электрическую, называется генератором, а машина, преобразующая электрическую энергию в механическую, называется двигателем.
Электрическая машина также может служить для преобразования электрической энергии одного рода тока (частоты, числа фаз переменного тока, напряжения постоянного тока) в энергию другого рода тока. Такие электрические машины называются преобразователями.
Электрические машины делятся на машины постоянного и переменного тока. Машины переменного тока могут быть как одно-, так и многофазными. Наибольшее применение нашли трехфазные синхронные и асинхронные машины.
Принцип действия электрических машин основан на физических законах электромагнитной индукции и электромагнитных сил. Согласно этим законам, а также законам Ома, Джоуля—Ленца можно получить основные соотношения между величинами, характеризующими рабочий процесс в электрических машинах.
Два полюса электромагнита, создающего магнитное поле, показаны на рис. 1. В магнитном поле между полюсами помещен проводник, сечение которого изображено кружком. Если в магнитном поле полюсов постоянных магнитов или электромагнитов поместить проводник и под действием какой-либо силы F перемещать его, то в нем возникает ЭДС, значение которой определяется формулой
е = Blv,
где В — магнитная индукция в месте, где находится проводник;
l — активная длина проводника, т. е. та часть, которая находится в магнитном поле;
v — скорость перемещения проводника в магнитном поле.
 Это соотношение предполагает, что проводник перемещается перпендикулярно направлению магнитных сил линий поля.
Это соотношение предполагает, что проводник перемещается перпендикулярно направлению магнитных сил линий поля.
Направление ЭДС определяется правилом
правой руки.
Если этот проводник замкнуть на какое-либо
сопротивление приемника электрической энергии, то в
замкнутой цепи под действием ЭДС будет протекать
электрический ток, совпадающий по направлению с ЭДС
в проводнике.
В результате взаимодействия тока I в проводнике с
магнитным полем создается электромагнитная сила FЭM, направление которой определяется по правилу левой руки, т, е. эта сила будет направлена навстречу силе, перемещающей проводник в магнитном поле.
При равенстве сил F = F ЭM проводник будет перемещаться с постоянной скоростью.
В такой простейшей электрической машине механическая энергия, затрачиваемая на перемещение проводника, преобразуется в электрическую энергию, т. е. такая машина работает генератором.
Если от постороннего источника электрической энергии через проводник пропустить ток, то в результате взаимодействия тока в проводнике с магнитным полем полюсов создается электромагнитная сила FЭМ под действием которой проводник начнет перемещаться в магнитном поле, преодолевая силу торможения какого- либо механического приемника энергии. В таком режиме машина будет работать двигателем.
В режиме генератора (рис. 2) электромагнитный момент МЭМ противодействует вращению, уравновешиваясь моментом МДВ первичного приводного двигателя (турбина, дизель и т.п.). В режиме двигателя электромагнитный момент М ЭМ действует по направлению вращения (рис. 3). При равномерном вращении ему противодействует момент сопротивления МС приводимого в движение механического устройства (станок, насос, вентилятор и т.п.).

Любая электрическая машина может быть использована в качестве как генератора, так и двигателя. Это свойство электрической машины изменять направление преобразуемой ею энергии называется обратимостью машины.
Принцип обратимости электрических машин был установлен русским академиком Э. Ленцем в 1833 г.
Конструктивно электрическая машина состоит из двух основных частей: вращающейся — ротора (от лат. rotor — вращающийся) и неподвижной — статора (от лат. stator — стоящий).
Запомните
· Наличие магнитного поля и проводников с током является необходимым условием для работы электрической машины как преобразователя энергии, а постоянное взаимодействие между ними достигается вращательным движением.
· Электрическая машина обладает принципом обратимости, т. е. может работать и как генератор, и как двигатель.
.
2. МАШИНЫПЕРЕМЕННОГО ТОКА
АСИНХРОННЫЕ МАШИНЫ.
ОСНОВНЫЕ ПОНЯТИЯ И ОБЛАСТЬ ПРИМЕНЕНИЯ
Наибольшее распространение среди электрических двигателей получил трехфазный асинхронный двигатель, впервые сконструированный известным русским электриком М.О.Доливо – Добровольским в 1889 г. Этот двигатель практически не подвергался серьезным изменениям до наших дней.
Асинхронный двигатель отличается простотой конструкцией и несложностью обслуживания. Так же как и любая машина переменного тока, асинхронный двигатель состоит из ротора 1 и статора 2 (рис. 4). Асинхронная машина может работать в режиме как двигателя, так и генератора. Однако из-за ряда существенных недостатков асинхронные генераторы практически не применяются. Различают несколько типов асинхронных двигателей: трех-, двух-, однофазные и линейные. Промышленностью выпускаются асинхронные двигатели с широким диапазоном мощностей: от нескольких ватт до нескольких мегаватт. За прошедшие годы асинхронные двигатели нашли очень широкое применение в различных отраслях промышленности и сельского хозяйства. Их используют в электроприводе металлорежущих станков, подъемно-транспортных машин, транспортеров, насосов, вентиляторов. Маломощные двигатели используются в устройствах автоматики.
Принципиальным недостатком асинхронных двигателей являются трудности, связанные с регулированием частоты вращения. Кроме того, эти двигатели имеют относительно низкий коэффициент мощности cosφ (0,85—0,90 при полной нагрузке и 0,2—0,3 на холостом ходу).
Асинхронные двигатели — самые распространенные двигатели на производстве и в быту.
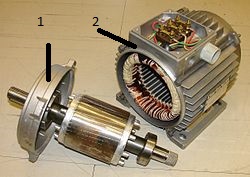
| Рис. 4. Асинхронная машина: 1 – ротор; 2 – статор. |
УСТРОЙСТВО АСИНХРОННОГО ДВИГАТЕЛЯ
Асинхронный двигатель состоит из неподвижной части — статора и вращающейся части — ротора. Частями статора являются магнитопровод и корпус. Сердечник собран из изолированных листов электротехнической стали, С внутренней стороны полый цилиндр сердечника статора снабжен пазами, в которые закладывается статорная обмотка (рис. 5, а). Число индуктивных катушек, образующих обмотку, должно быть кратно трем (3, 6, 9, 12 и т. д.).
В зависимости от конструкции обмотки ротора различают силовые асинхронные двигатели с короткозамкнутым и фазным роторами. Ротор представляет собой укрепленный на валу цилиндр, собранный, так же как и сердечник статора, из листов электротехнической стали (рис. 5, б). В большинстве случаев ротор снабжается короткозамкнутой обмоткой, состоящей из медных или алюминиевых стержней, уложенных без изоляции в пазы на внешней поверхности магнитопровода ротора. Торцевые концы стержней замыкаются накоротко кольцами из того же материала.
Трехфазный асинхронный двигатель с короткозамкнутым ротором наиболее прост, надежен в работе и дешев.
Реже ротор снабжается фазной (катушечной) обмоткой (обычно для двигателей большой мощности), выполняемой изолированным проводом. В этом случае на валу ротора укрепляются три металлических контактных кольца, изолированных от вала (рис. 5, в). Обмотка ротора изготовляется трехфазной, изолированным проводом, с тем же числом индуктивных катушек, что и обмотка статора. Фазные обмотки ротора на самом роторе соединяются в «звезду», а их свободные концы подводятся к контактным кольцам. На кольца наложены щетки, установленные в неподвижных щеткодержателях. Через кольца и щетки фазная обмотка замыкается на пусковой реостат
.
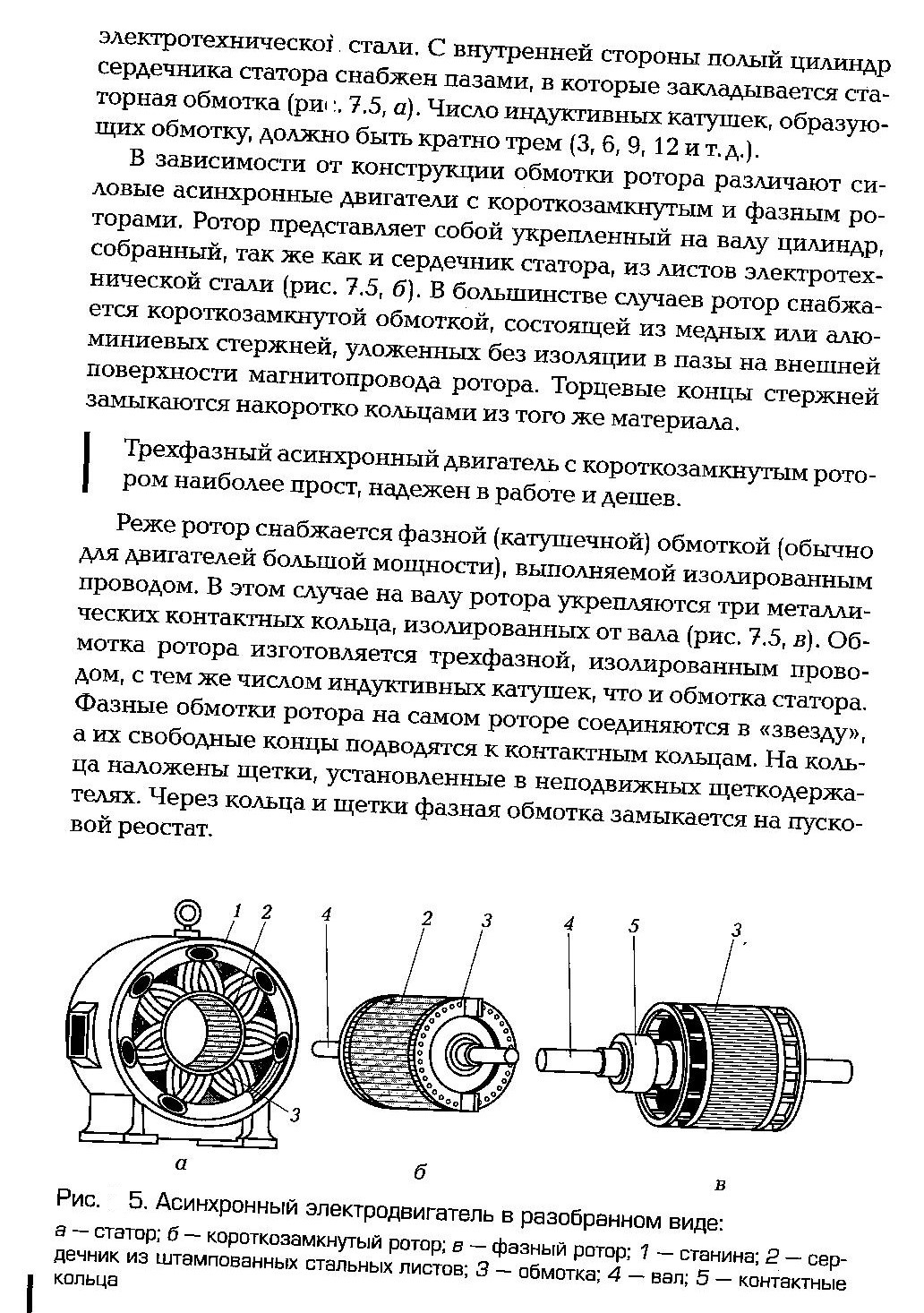
Двигатели с фазным ротором сложнее, дороже и менее надежны в эксплуатации, чем с короткозамкнутым, но обладают лучшими пусковыми и регулировочными свойствами.
ПРИНЦИП ДЕЙСТВИЯ И РЕЖИМ РАБОТЫ
АСИНХРОННОГО ДВИГАТЕЛЯ
Принцип действия асинхронного двигателя рассмотрим на модели, представленной на рис. 6.
Сердечники статора и ротора образуют магнитную цепь асинхронной машины. Обмотка статора подключается к трехфазной сети, и токи, обтекая обмотку статора, возбуждают магнитное поле машины. Оно замыкается через сталь ротора и таким путем сцепляется с обмоткой ротора. Магнитное поле, возбужденное трехфазной системой токов, вращается в плоскости осей индуктивных катушек статора.
Вращение поля создается поочередным изменением трех образующих его полей фазных обмоток статора, поэтому скорость вращения поля пропорциональна частоте переменного тока I и определяется по следующей формуле:

 Если на статоре размещены три индуктивные катушки, то вращающееся поле, возбуждаемое их токами, делает один оборот в секунду. При стандартной частоте 50 Гц число оборотов такого поля в минуту n1 = f ·60 = 3000 об/мин. (Чем больше катушек на статоре, тем больше полюсов имеет вращающееся поле и тем медленнее оно вращается).
Если на статоре размещены три индуктивные катушки, то вращающееся поле, возбуждаемое их токами, делает один оборот в секунду. При стандартной частоте 50 Гц число оборотов такого поля в минуту n1 = f ·60 = 3000 об/мин. (Чем больше катушек на статоре, тем больше полюсов имеет вращающееся поле и тем медленнее оно вращается).
Вращающееся магнитное поле статора, пересекая обмотку ротора,
индуктирует в ее проводниках ЭДС, а так как обмотка ротора замкнута,
то индуктируемые в ней ЭДС создают в этой обмотке
пропорциональные им токи ротора. Последние, взаимодействуя с
вращающимся магнитным полем машины, заставляют ротор вращаться
вслед за полем. Ротор двигателя вращается с асинхронной скоростью n 2,
меньшей, чем синхронная скорость вращения поля n1. Разность скоростей
вращения поля и ротора характеризуется скольжением

Скольжение асинхронной машины, работающей в режиме двигателя, изменяется от нуля до единицы.
В момент пуска двигателя, когда скорость ротора п2 = 0, скольжение S= 1, или 100%.
При холостом ходе n 2≈ n 1, скольжение S≈0. Скольжение асинхронного двигателя в зависимости от нагрузки меняется незначительно (1—6%). Чем больше мощность двигателя, тем меньше его скольжение.
Пример 1. Определить скольжение в процентах для шестиполюсного асинхронного двигателя, если ротор делает 960 об/мин, частота тока f = 50 Гц.
Решение
Скорость вращения поля

Тогда скольжение

Скольжение S характеризует скорость пересечения обмоток ротора вращающимся магнитным полем.
Для изменения направления вращения ротора, т.е. для реверсирования двигателя, необходимо изменить направление вращения магнитного поля, создаваемого обмоткой статора. Это достигается переключением двух фаз, т. е. двух из трех проводов, соединяющих обмотку статора с сетью.
Запомните
· Если ротор вращается с частотой вращения n 2, равной частоте вращения магнитного поля (n 2 = n1), т.е. синхронно с полем, то такая частота вращения называется синхронной.
· Если частота вращения ротора не равна частоте вращения магнитного поля (n2≠n1), то такая частота вращения называется асинхронной.
· Асинхронный двигатель развивает вращающий момент только при асинхронной частоте. Частота вращения ротора может мало отличаться от частоты вращения магнитного поля, но принципиально важно, что при работе двигателя она будет всегда меньше (n 2 < n1) частоты вращения поля.
· Для реверсирования двигателя, т. е. для изменения направления вращения ротора, необходимо изменить направление вращения магнитного поля, созданного обмоткой статора. Это можно сделать изменением последовательности фаз обмоток статора. Реверсивные двигатели снабжаются переключателями, с помощью которых можно изменять чередование фаз обмоток статора, а следовательно, и направление вращение ротора.
ЗАВИСИМОСТЬ ЭЛЕКТРОМАГНИТНОГО
МОМЕНТА ОТ СКОЛЬЖЕНИЯ
Электромагнитный момент возникает при наличии магнитного поля, создаваемого обмоткой статора, и тока в обмотке ротора. Электромагнитный момент определяется соотношением
М=СмФI2cosψ2
где См — конструктивный коэффициент асинхронной машины; Ф — результирующее магнитное поле в машине; ψ2 — сдвиг по фазе между ЭДС и током ротора; I 2 cosψ2 — активная составляющая тока ротора.
Для анализа работы асинхронного двигателя также используют следующую формулу зависимости электромагнитного момента М двигателя от скольжения 5, напряжения, подводимого к обмотке статора, U1 активного сопротивления обмотки ротора, связанного с потерями на нагрев обмотки, R2, и индуктивного сопротивления обмотки неподвижного ротора, связанного с потоком рассеяния, Х2:

Из полученного выражения для электромагнитного момента М следует, что он сильно зависит от подведенного напряжения U1.
При снижении, например, напряжения на 10% электромагнитный момент снизится на 19%. Это является одним из недостатков асинхронных двигателей.
Выражение для электромагнитного момента [см. формулу (1)] справедливо для любого режима работы и может быть использовано для построения зависимости электромагнитного момента от скольжения при изменении последнего от +∞ до -∞ (рис. 7).

Двигатель при пуске в ход (S=1) развивает момент Мпуск. Скольжение, при котором момент достигает наибольшего значения, называют критическим скольжением Sкр, а наибольшее значение момента — критическим моментом Мкр. Отношение критического момента к номинальному называют перегрузочной способностью двигателя:

Участок характеристики (см. рис. 7), на котором скольжение изменяется от 0 до Sкp, соответствует устойчивой работе двигателя.
На этом участке располагается точка номинального режима (Мн, Sн). В пределах изменения скольжения от 0 до Sкp изменение нагрузки на валу двигателя будет приводить к изменению частоты вращения ротора, изменению скольжения и вращающего момента. С увеличением момента нагрузки на валу частота вращения ротора станет меньше, что приведет к увеличению скольжения и электромагнитного (вращающего) момента. Если момент нагрузки превысит критический момент, то двигатель остановится.
Запомните
· Вращающийся момент двигателя пропорционален квадрату напряжения питающей сети.
· Участок характеристики, на котором скольжение изменяется от Sкр до 1, соответствует неустойчивой работе двигателя. Этот участок характеристики двигатель проходит при пуске в ход и торможении.
МЕХАНИЧЕСКАЯ ХАРАКТЕРИСТИКА
АСИНХИРОННОГО ДВИГАТЕЛЯ
Механическая характеристика — это зависимость, показывающая, как меняется частота вращения ротора при изменении момента на валу двигателя, п2 - f(M) (рис. 8).

Участок 1 —3 соответствует устойчивой, а участок 3 — 4 — неустойчивой работе асинхронного двигателя (используется при пуске или вынужденной остановке двигателя).
Точка 1 соответствует идеальному холостому ходу двигателя, когда n1 = п2; точка 2 — номинальному режиму работы двигателя, ее координаты (M н, n н); точка 3 — критическому моменту Мкр и критической частоте вращения n кр; точка 4 — пусковому моменту двигателя Мпуск.
Механическую характеристику можно рассчитать и построить по паспортным данным.
Для точки 1  , где f – частота сети, р – число пар полюсов двигателя.
, где f – частота сети, р – число пар полюсов двигателя.
Для точки 2 с координатами (M н, n н) номинальная частота вращения n н задается в паспорте. Номинальный момент,  = Н · м, рассчитывается по формуле
= Н · м, рассчитывается по формуле

где Рн – номинальная мощность (мощность на валу).
Для точки 3 с координатами Мкр= Мн 
Перегрузочная способность  задается в паспорте двигателя.
задается в паспорте двигателя.
Критическая частота вращения
n кр= n1 (1 - Sкр)
Критическое скольжение

Номинальное скольжение

Точка 4 имеет координаты (М = Мпуск, n 2=0). Пусковой момент вычисляют по формуле
Мпуск = Мн пуск
где пуск – кратность пускового момента, задается в паспорте.
Асинхронные двигатели имеют жесткую механическую характеристику, так как частота вращения ротора (участок 1 —3) на рис. 8 мало зависит от нагрузки на валу. Это одно из достоинств этих двигателей.
ПУСК АСИНХРОННЫХ ДВИГАТЕЛЕЙ
В момент пуска двигателя п2 = 0, т. е. скольжение S = 1. Токи в обмотках ротора и статора зависят от скольжения и возрастают при его увеличении. Пусковой ток двигателя будет в 5—8 раз больше его номинального тока:
I пуск= (5-8) I н
Из-за большой частоты ЭДС ротора асинхронные двигатели имеют ограниченный пусковой момент:
Мпуск=(0,8 – 1,8)Мн
Для пуска в ход асинхронного двигателя необходимо, чтобы развиваемый им пусковой момент превышал момент нагрузки на валу. В зависимости от мощности источников питания и условий пуска используют разные способы пуска, которые преследуют цели уменьшения пускового тока и увеличения пускового момента.
Различают следующие способы пуска в ход асинхронных двигателей: прямое включение в цепь, пуск при пониженном напряжении, реостатный пуск, использование двигателей с улучшенными пусковыми свойствами.
Прямое включение в сеть. Это самый простой и самый дешевый способ пуска. На двигатель вручную или с помощью дистанционного управления подается номинальное напряжение. Прямое включение в сеть допускается, когда мощность двигателя не превышает 5 % мощности трансформатора, если от него питается и осветительная сеть. Ограничение по мощности объясняется бросками тока в момент пуска, что приводит к снижению напряжения на зажимах вторичных обмоток трансформатора. Если от трансформатора не питается осветительная сеть, то прямое включение в сеть можно применять для двигателей, мощность которых не превышает 25 % мощности трансформатора.
Пуск при пониженном напряжении. Этот способ применяют при пуске в ход мощных двигателей, для которых недопустимо прямое включение в сеть. Для понижения подводимого к обмотке статора напряжения используют дроссели и понижающие автотрансформаторы. После пуска в ход на обмотку статора подается напряжение сети. Понижение напряжения производят в целях уменьшения пускового тока, но одновременно происходит уменьшение пускового момента. Если напряжение при пуске понизить в  раз, то пусковой момент понизится в три раза, поэтому этот способ пуска можно применять только при отсутствии нагрузки на валу, т. е. в режиме холостого хода. Если, согласно паспортным данным, двигатель должен включаться в сеть по схеме «треугольник», то для снижения пускового тока на время пуска в ход обмотку статора включают по схеме «звезда».
раз, то пусковой момент понизится в три раза, поэтому этот способ пуска можно применять только при отсутствии нагрузки на валу, т. е. в режиме холостого хода. Если, согласно паспортным данным, двигатель должен включаться в сеть по схеме «треугольник», то для снижения пускового тока на время пуска в ход обмотку статора включают по схеме «звезда».
Основные недостатки этого способа пуска: высокая стоимость пусковой аппаратуры и невозможность пуска с нагрузкой на валу.
Реостатный пуск. Этот способ применяют при тяжелых условиях пуска, т. е. при большой нагрузке на валу. Для реостатного пуска используют асинхронные двигатели с фазным ротором, в цепь ротора включается пусковой реостат. Реостатный пуск служит для увеличения пускового момента. Одновременно происходит уменьшение пускового тока двигателя. По мере разгона двигателя пусковой реостат выводится и после окончания пуска обмотка ротора оказывается замкнутой накоротко.
Схема реостатного пуска и механические характеристики при этом пуске представлены на рис. 9.
В момент пуска в ход (см. рис. 9, а) в цепь ротора введен полностью пусковой реостат (Rпуск3 = Rпуск1 + Rпуск2), для чего контакты реле К1 и К2 разомкнуты. При этом двигатель будет запускаться по характеристике 3 (см. рис. 9, б) под действием пускового момента Мпуск.
При заданной нагрузке на валу и введенном реостате Rпуск3 разгон закончится в точке А. Для дальнейшего разгона двигателя нужно замкнуть контакты К2 при этом сопротивление пускового реостата снизится до Rпуск2 и разгон будет продолжаться по характеристике 2 до точки В. При замыкании контактов К2 пусковой реостат будет полностью выведен (Rпуск = 0) и окончательный разгон двигателя будет продолжаться по его естественной механической характеристике 1 и закончится в точке С.

Использование двигателей с улучшенными пусковыми свойствами. Стремление совместить достоинства асинхронных двигателей с короткозамкнутым ротором (высокая надежность) и фазным ротором (большой пусковой момент) привело к созданию двигателей с улучшенными пусковыми свойствами. Они имеют короткозамкнутую обмотку ротора специальной конструкции. Различают двигатели с обмоткой ротора в виде двойной «беличьей клетки» (рис. 10, а) и с глубоким пазом (рис. 10, б).
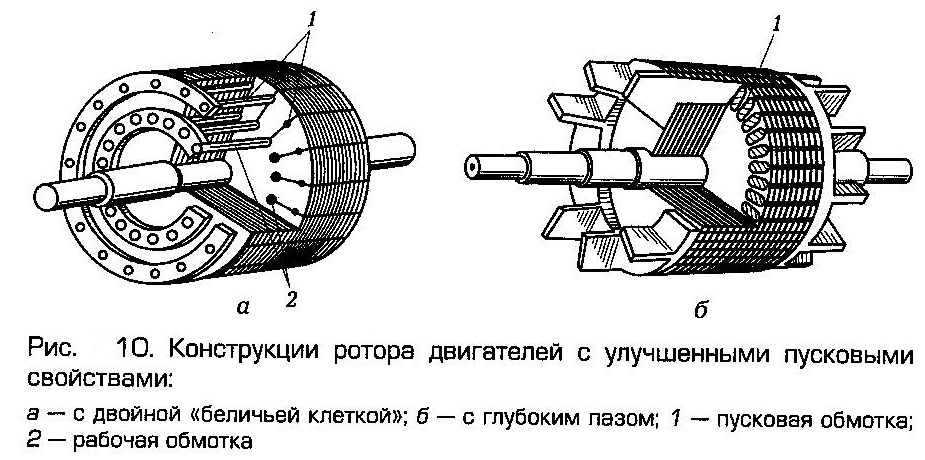
У двигателя с двойной «беличьей клеткой» (см. рис. 10, а) на роторе закладывают две короткозамкнутые обмотки. Обмотка 1 играет роль пусковой, а обмотка 2 является рабочей. Для получения повышенного пускового момента пусковая обмотка должна обладать большим активным сопротивлением, чем рабочая обмотка, поэтому обмотка 1 выполняется из материала с повышенным удельным сопротивлением (латунь), чем обмотка 2 (медь). Сечение проводников, образующих пусковую обмотку, меньше, чем у рабочей обмотки. За счет этого повышается активное сопротивление пусковой обмотки.
Рабочая обмотка, расположенная глубже, охватывается большим магнитным потоком, чем пусковая, поэтому индуктивное сопротивление рабочей обмотки значительно больше, чем пусковой. За счет этого в момент пуска в ход, когда частота тока ротора имеет наибольшее значение, ток в рабочей обмотке, как следует из закона Ома, будет небольшим и в создании пускового момента будет участвовать в основном пусковая обмотка, имеющая большое активное сопротивление. По мере разгона двигателя частота тока ротора падает, уменьшается и индуктивное сопротивление обмоток ротора, что приводит к увеличению тока в рабочей обмотке. За счет этого в создании вращающего момента будет участвовать в основном рабочая обмотка. Она обладает малым активным сопротивлением, поэтому естественная механическая характеристика двигателя будет жесткой.
Аналогичная картина наблюдается у двигателя с глубоким пазом (см. рис. 10, б). Глубокий стержень обмотки 1 можно представить в виде нескольких проводников, расположенных по высоте паза. За счет высокой частоты тока в обмотке ротора в момент пуска в ход происходит «вытеснение тока к поверхности проводника». За счет этого в создании пускового момента участвует только верхний слой проводников обмотки ротора. Сечение верхнего слоя значительно меньше сечения всего проводника, поэтому при пуске в ход обмотка ротора обладает повышенным активным сопротивлением, двигатель развивает повышенный пусковой момент. По мере разгона двигателя плотность тока по сечению проводников обмотки ротора выравнивается, сопротивление обмотки ротора снижается.
В целом эти двигатели имеют жесткие механические характеристики, повышенный пусковой момент и меньшую кратность пускового тока, чем двигатели с короткозамкнутым ротором обычной конструкции.
ТОРМОЗНЫЕ РЕЖИМЫ
АСИНХРОННЫХ МАШИН
При работе многих производственных механизмов возникает необходимость в быстрой остановке (торможении) двигателя. Для этой цели широко используются механические тормоза, но асинхронная машина может сама выполнять функции тормозного устройства, работая в одном из тормозных режимов. При этом механические тормоза используются как запасные или аварийные, а также для удержания механизма в неподвижном состоянии.
Различают три тормозных режима асинхронных машин:
1) генераторное торможение;
2) динамическое торможение;
торможение противовключением.
Генераторное торможение. Машина переходит в режим генератора, если ротор начнет вращаться быстрее магнитного поля. Этот режим может наступить при регулировании скорости вращения увеличением числа пар полюсов или уменьшением частоты источника питания, а также в подъемно-транспортных машинах при опускании груза, когда под действием силы тяжести груза ротор начинает вращаться быстрее магнитного поля.
В режиме генератора изменяется направление электромагнитного момента, т. е. он становится тормозным, под действием чего происходит быстрое снижение скорости вращения. Одновременно изменяется фаза тока в обмотке статора, что приводит к изменению направления передачи электрической энергии. В режиме генератора происходит возврат энергии в сеть.
Одно из достоинств генераторного торможения у асинхронных машин заключается в том, что переход в режим генератора происходит автоматически, как только ротор начинает вращаться быстрее магнитного поля. Это защищает асинхронные двигатели От аварийной ситуации, которая может наступить у двигателей постоянного тока. Асинхронные двигатели не могут пойти в разнос. Максимальная частота вращения ротора ограничивается частотой вращения магнитного поля.
Генераторное торможение является самым экономичным режимом, так как происходит преобразование механической энергии в электрическую и возврат энергии в сеть. Одно из достоинств этого тормозного режима состоит в его самопроизвольном появлении, т. е. не требуется никакая контролирующая аппаратура.
Динамическое торможение. Этот тормозной режим используется для точной остановки мощных двигателей. На время торможения обмотка статора отключается от сети переменного напряжения и подключается и источнику с постоянным напряжением. При этом обмотка статора будет создавать постоянное неподвижное магнитное поле. При вращении ротора относительно этого магнитного поля изменяется направление ЭДС и тока ротора, что приведет к изменению направления электромагнитного момента, т.е. он станет тормозным. Под действием этого момента происходит торможение. Изменяя величину подведенного к обмотке статора напряжения, можно регулировать время торможения.
Основным достоинством этого тормозного режима является точная остановка. Постоянное напряжение можно подводить к обмотке статора только на время торможения. После останов ки двигатель нужно отключить от сети постоянного тока. Основные недостатки динамического торможения: необходим источник постоянного тока и неэкономичность.
Торможение противовключением. Этот тормозной режим возникает при реверсе двигателя, а также широко используется для быстрой остановки двигателя.
Для торможения двигателя нужно изменить порядок чередования фаз, т. е. переключить две фазы.
Достоинством этого тормозного режима является быстрое торможение, так как тормозной момент действует на всем тормоз ном пути. Недостатки: большие токи и потери в обмотках при торможении, необходима аппаратура, контролирующая скорость вращения и отключающая двигатель от сети при его остановке. Если в приводе механизма двигатель часто работает в режиме реверса, приходится завышать его мощность из-за больших потерь мощности.
РЕГУЛИРОВАНИЕ ЧАСТОТЫВРАЩЕНИЯ
АСИНХРОННОГО ДВИГАТЕЛЯ
Число оборотов ротора в минуту определяется следующим выражением:

Из выражения видно, число оборотов ротора асинхронного двигателя можно регулировать изменением любой из трех величин: f 1, р, S.
Регулирование частоты вращения асинхронного двигателя с по мощью изменения частоты тока сети возможно на базе полупроводниковой техники. При таком регулировании частота вращения изменяется плавно.
Изменение числа полюсов электрической машины возможно, если на статоре выполнено несколько (обычно две) обмоток с раз личным числом полюсов или одна обмотка, допускающая переключения на различное число полюсов. При изменении числа полюсов обмотки статора изменится скорость вращения его магнитного поля, а следовательно, и частота вращения ротора двигателя. Этот способ регулирования является достаточно экономичным, но недостаток его состоит в ступенчатом изменении частоты вращения двигателя. Кроме того, стоимость такого двигателя возрастает вследствие усложнения обмотки статора и увеличения габаритных размеров машины.
Регулирование частоты вращения этим способом применяется в двигателях с короткозамкнутым ротором.
Изменение скольжения можно получить путем введения в цепь обмотки ротора регулирующего реостата. Регулирующий реостат включается в цепь обмотки фазного ротора подобно пусковому, но в отличие от пускового этот реостат рассчитывается на длительную нагрузку током. Этот способ регулирования частоты вращения Синхронных двигателей имеет ряд существенных недостатков: дополнительные потери в реостате, малый диапазон регулирования.
Асинхронные двигатели являются наиболее распространенны ми среди электрических двигателей и выпускаются со стандартизованными номинальными значениями синхронных частот вращения для промышленной частоты сети 50 Гц: 3 ООО; 1 500; 1 ООО; 750 375; 300; 250; 187,5; 166,6; 150; 125; 100 об/мин.
Номинальные рабочие частоты асинхронных двигателей не сколько меньше синхронных из-за наличия скольжения.
КОЭФФИЦИЕНТ МОЩНОСТИ
АСИНХРОННОГО ДВИГАТЕЛЯ
Коэффициент мощности асинхронного двигателя определяется соотношением

где P1 Q1, S1 активная, реактивная и полная мощность двигателя соответственно.
Активная мощность двигателя Р1 складывается из мощности на валу Р2 (полезной мощности) и мощности потерь  Р:
Р:
P1= Р2+ Р.
Потери складываются из электрических потерь (потери на нагрев обмоток) Рэл; потерь в стали (потери на нагрев сердечника) Рст и механических потерь Рмех:
Р= Рэл+ Рст+ Рмех.
Электрические потери Рэл зависят от токов в обмотках и возрастают при увеличении нагрузки на валу. Потери в стали не зависят от нагрузки на валу, а зависят от подведенного к обмотке статора напряжения. Механичес