Рассмотрим теперь условия, при которых обеспечивается нормальная работа вспомогательных трактов. Опорное напряжение вырабатывается с помощью системы фазовой автоподстройки частоты (ФАП).
Получение опорного напряжения предсавляет собой особую техническую задачу. Для этой цели невозможно использовать независимый генеродин в приемном устройстве, так как его колебания практически не будут когерентными с несущей сигнала. Причиной является уходы частоты из-за нестабильности генератора, долеровское смещение частоты из-зи движения пункта передачи или приема и т. д. Для обеспечения когерентности гетеродина в приемнике необходимо синхронизировать приходящим сигналом.
Первый способ создания когерентного опорного напряжения – способ который мы и будем реализовывать. Когда в спектре сигнала имеется компонента на несущей частоте  , ее используют для синхронизации гетеродина обычно с помощью системы ФАП либо непосредственно выделяют с помощью узкополосного фильтра и после соответствующей обработки (усиления, ограничения, поворота фазы) берут в качестве опорного напряжения. Поворот фазы, который надо сделать в опорном канале, зависит от фазы компоненты на несущей частоте, т. е. при КИМ-ФМ от параметров сигнала
, ее используют для синхронизации гетеродина обычно с помощью системы ФАП либо непосредственно выделяют с помощью узкополосного фильтра и после соответствующей обработки (усиления, ограничения, поворота фазы) берут в качестве опорного напряжения. Поворот фазы, который надо сделать в опорном канале, зависит от фазы компоненты на несущей частоте, т. е. при КИМ-ФМ от параметров сигнала  и
и  (где
(где  - коэффициент передачи фазовой модуляции [рад/В],
- коэффициент передачи фазовой модуляции [рад/В],  - «1» в среднем занимают столько же времени, сколько «0»). Так, например, если принято
- «1» в среднем занимают столько же времени, сколько «0»). Так, например, если принято  и, следовательно, гармоника на несущей частоте определяется как
и, следовательно, гармоника на несущей частоте определяется как
 , (7)
, (7)
фаза опорного сигнала должна совпадать с фазой несущей.
Чаще, однако, имеет место случай, когда специально делают  , чтобы сохранить в спектре компоненту на несущей частоте. При этом фаза опорного напряжения должна отличаться на
, чтобы сохранить в спектре компоненту на несущей частоте. При этом фаза опорного напряжения должна отличаться на  от фазы несущей сигнала. Нетрудно видеть, что, уменьшая индекс фазовой модуляции (
от фазы несущей сигнала. Нетрудно видеть, что, уменьшая индекс фазовой модуляции ( ) для сохранения несущей, мы тем самым снижаем амплитуду полезноых компонент. Следовательно, выбор величины приходится проводить исходя из противоречивых требований. Практически можно взять, например, равной
) для сохранения несущей, мы тем самым снижаем амплитуду полезноых компонент. Следовательно, выбор величины приходится проводить исходя из противоречивых требований. Практически можно взять, например, равной  . При этом мощность на несущей составляет около четверти всей мощности сигнала.
. При этом мощность на несущей составляет около четверти всей мощности сигнала.
Таким образом, часть энергии передатчика расходуется для работы канала синхронизации. Это, естественно, ухудшает условия выделения полезного сообщения по сравнению с идеальным случаем. Другая трудность, связанная с выделением компоненты на несущей частоте из сигнала ИМ-ФМ, возникает из-за того, что вблизи частоты располагаются составляющие передаваемого сообщения, которые могут попасть в опорный канал и внести помехи в работу синхронного детектора. Тогда шумовая полоса ФАП  должна быть выбрана так, чтобы удовлетворялось условие
должна быть выбрана так, чтобы удовлетворялось условие
 . (8)
. (8)
Другой способ создания когерентного опорного напряжения основан на выделении нужного колебания из сигнала после предварительного снятия модуляции. Пусть в спектре сигнала ИМ-ФМ не содержится несущая, т. е. и . Нужное колебание частоты можно создать в результате определенных нелинейных преобразований сигнала в опорном канале. Эти преобразования сводятся к последовательносму умножению и делению частоты входного сигнала на два.
Технически применение последовательного умножения и деления частоты оказывается неудобным. Разработан рад практически более удобных схем, позволяющих реализовать тот же принцип. Имеются и другие достаточно простые схемы. Однако всем им присущ общий недостаток: они не исключают перехода синхронного детектора в обратный режим работы. Действительно, фаза опорного напржения, полученного в результате деления частоты, всегда будет иметь неопределенность на  . Практически фаза будет зависеть от начальных условий на делителе и может случайно измениться на при всякого рода внешних воздействиях, перерывах в связи и т. д. Неожиданный переход к обратному режиму является недопустимым искажением. Поэтому в сигнале приходится предусматривать специальные контрольные посылки, которые обнаруживают обратную работу. Естественно, что на создание таких контрольных посылок затрачивается часть энергии передатчика, что соответственно сказвается на выделении полезного сообщения.
. Практически фаза будет зависеть от начальных условий на делителе и может случайно измениться на при всякого рода внешних воздействиях, перерывах в связи и т. д. Неожиданный переход к обратному режиму является недопустимым искажением. Поэтому в сигнале приходится предусматривать специальные контрольные посылки, которые обнаруживают обратную работу. Естественно, что на создание таких контрольных посылок затрачивается часть энергии передатчика, что соответственно сказвается на выделении полезного сообщения.
И так, при рассмотрении основного тракта выделения сообщений предполагается, что фазовые ошибки в канале опорного напряжения достаточно малы.
Теперь рассмотрим одним из главных параметров - полосу захвата  . Выбор этой величины при проектировании определяется рядом факторов, многие из которых являются противоречивыми. Так, очевидно, что для уменьшения шумовых флюктуации фазы опорного гетеродина надо уменьшить . Однако при этом увеличится постоянная ошибка слежения согласно
. Выбор этой величины при проектировании определяется рядом факторов, многие из которых являются противоречивыми. Так, очевидно, что для уменьшения шумовых флюктуации фазы опорного гетеродина надо уменьшить . Однако при этом увеличится постоянная ошибка слежения согласно
 . (9)
. (9)
Если частота несущей сигнала заранее известна с большой ошибкой, то приходится в систему ФАП дополнительно вводить устройство поиска, перестраивающее гетеродин до тех пор, пока частота сигнала не окажется в полосе захвата. Однако в нашем случае мы будем считать, что несущая частота нам заранее известна с малой ошибкой. Время поиска  обычно ограничено. Поэтому скорость перестройки
обычно ограничено. Поэтому скорость перестройки  нельзя выбирать очень малой. С другой стороны, при большой скорости и узкой полосе захвата можно пропустить сигнал. Это обстоятельство также ограничивает возможность сужения полосы . Таким образом, возникает задача оптимального выбора полосы захвата при наличии ограничении. Поскольку система ФАП предназначена для выработки опорного напряжения в синхронном детекторе, в качестве основного критерия можно принять максимум полезного напряжения сигнала на его выходе.
нельзя выбирать очень малой. С другой стороны, при большой скорости и узкой полосе захвата можно пропустить сигнал. Это обстоятельство также ограничивает возможность сужения полосы . Таким образом, возникает задача оптимального выбора полосы захвата при наличии ограничении. Поскольку система ФАП предназначена для выработки опорного напряжения в синхронном детекторе, в качестве основного критерия можно принять максимум полезного напряжения сигнала на его выходе.
Система синхронизации
В цифровых радиолиниях необходимо применять кадровую при синхронной передаче, а также пословную синхронизации. В случае посимвольного приема дополнительно требуются сигналы посимвольной синхронизации. С помощью соответствующих синхронизирующих сигналов осуществляется разделение каналов и обеспечивается правильная работа декодирующих устройств командных сигналов. В нашем случае сигнал будет иметь следующий вид.

Рисунок 7 Структура демодулированного сигнала
Кадровая синхронизация. Синхронизирующее слово, ставящееся в начале каждого кадра, называется словом кадровой синхронизации. В качестве слов кадровой синхронизации при временном уплотнении каналов (Рисунок 6) часто используются составные сигналы, причем выделение этих слов в приемнике осуществляется с помощью пассивного согласованного фильтра (Рисунок 8). Напряжение на выходе согласованного фильтра воспроизводит автокорреляционную функцию синхронизирующего сигнала. Для уменьшения ошибок, возникающих при обнаружении синхронизирующего сигнала и определении его временного положения, автокорреляционная функция данного сигнала должна иметь узкий центральный пик и малый уровень «боковых» выбросов. Подобным свойством обладает ряд широкополосных сигналов, в том числе сигналы, сформированные на основе некоторых двоичных кодов.
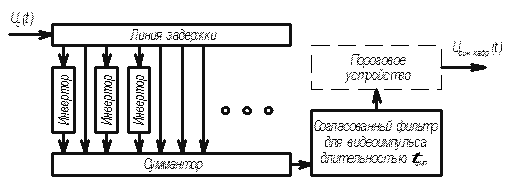
Рисунок 8 Устройство декодирования кадрового синхронизирующего сигнала
Принятый синхронизирующий видеосигнал, поступает на вход линии задержки. Расстояние между отдельными отводами этой линии соответствует длительности элементарных импульсов кода  . Максимальное время задержки синхронизирующего сигнала равно полной длительности сигнала
. Максимальное время задержки синхронизирующего сигнала равно полной длительности сигнала  . Сигналы, которые снимаются с отводов линии задержки, поступают на сумматор. При этом часть сигналов проходит через инверторы, изменяющие полярность сигналов. Пространственное расположение отводов линии задержки, к которым подключены инверторы, воспроизводит в обратном порядке временное положение символов «0», имеющихся в составе рассматриваемого синхронизирующего кодового слова. Тем самым обеспечивается синхронное накопление энергии отдельных импульсов этого слова в сумматоре. К выходу сумматора подключен фильтр, который согласован с одиночным видеоимпульсом длительности . В момент окончания принятого синхронизирующего кодового слова на выходе согласованного фильтра образуется короткий импульс значительной амплитуды. С помощью таких импульсов осуществляется запуск порогового устройства, предназначенного для выделения отдельных синхронизирующих сигналов.
. Сигналы, которые снимаются с отводов линии задержки, поступают на сумматор. При этом часть сигналов проходит через инверторы, изменяющие полярность сигналов. Пространственное расположение отводов линии задержки, к которым подключены инверторы, воспроизводит в обратном порядке временное положение символов «0», имеющихся в составе рассматриваемого синхронизирующего кодового слова. Тем самым обеспечивается синхронное накопление энергии отдельных импульсов этого слова в сумматоре. К выходу сумматора подключен фильтр, который согласован с одиночным видеоимпульсом длительности . В момент окончания принятого синхронизирующего кодового слова на выходе согласованного фильтра образуется короткий импульс значительной амплитуды. С помощью таких импульсов осуществляется запуск порогового устройства, предназначенного для выделения отдельных синхронизирующих сигналов.
На вход рассматриваемого согласованного фильтра поступает напряжение  , которое содержит как синхронизирующее, так и телеметрические сигналы. Воздействие на согласованный фильтр телеметрических слов сопровождается образованием дополнительных «выбросов» напряжения на выходе этого фильтра. Для предотвращения ложных срабатываний порогового устройства под действием таких выбросов коэффициенты взаимной корреляции между синхронизирующим сигналом и отдельными телеметрическими словами должны иметь незначительную величину.
, которое содержит как синхронизирующее, так и телеметрические сигналы. Воздействие на согласованный фильтр телеметрических слов сопровождается образованием дополнительных «выбросов» напряжения на выходе этого фильтра. Для предотвращения ложных срабатываний порогового устройства под действием таких выбросов коэффициенты взаимной корреляции между синхронизирующим сигналом и отдельными телеметрическими словами должны иметь незначительную величину.
В инерционной системе кадровой синхронизации сигналы, выделенные с помощью согласованного фильтра, могут использоваться для автоматической подстройки частоты местного генератора синхронизирующих сигналов. Постоянная времени инерционной системы значительно превышает длительность синхронизирующего сигнала . Следовательно, в установившемся режиме обеспечивается хорошая фильтрация помех, и высокая точность определения начала кадра. Недостатком инерционной системы является значительное время обнаружения слова кадровой синхронизации, а также возможность срыва слежения под действием помех.
Пословная синхронизация предназначается для определения границ отдельных команд в составе кадра. Существуют различные способы осуществления пословной синхронизации. Способ, который мы будем использовать, основан на использовании специальных разделительных сигналов (Рисунок 7 – заштрихованные импульсы). При синхронной непрерывной передаче сообщений разделительные сигналы имеют периодический характер, поэтому в спектре модулирующего сигнала радиолинии возникает регулярная составляющая на частоте следования слов сообщения  . После детектирования принятого радиосигнала эта составляющая выделяется с помощью узкополосного фильтра и используется для формирования сигналов пословной синхронизации. Такая система синхронизации является инерционной.
. После детектирования принятого радиосигнала эта составляющая выделяется с помощью узкополосного фильтра и используется для формирования сигналов пословной синхронизации. Такая система синхронизации является инерционной.
Посимвольная синхронизация используется при посимвольном приеме кодовых слов и обеспечивает разделение элементарных сигналов, соответствующих различным позициям кодового слова. Требования к точности посимвольной синхронизации зависят от используемого способа обработки элементарных информационных сигналов в приемнике. При обработке, близкой к оптимальной, а она в нашем случае именно такая, необходимо достаточно точное определение границ этих сигналов. Требования к точности синхронизации возрастают с уменьшением длительности элементарных сигналов.

Рисунок 9 Функциональная схема инерционной системы посимвольной синхронизации
Для выделения сигналов посимвольной синхронизации непосредственно используется последовательность принимаемых информационных символов. На Рисунок 9 показана функциональная схема инерционной системы посимвольной синхронизации. В результате дифференцирования сигнала , образуется последовательность импульсов, временное положение которых соответствует границам между соседними символами «1» и «0». Эта последовательность поступает на временной дискриминатор, который вырабатывает управляющее напряжение, пропорциональное временнóму рассогласованию между входной и опорной последовательностью импульсов. Последняя и используется в качестве сигналов посимвольной (тактовой) синхронизации. Опорная последовательность вырабатывается генератором синхронизирующих сигналов. С помощью управляющего напряжения изменяется частота следования импульсов опорной последовательности, тем самым обеспечивается автоматическая подстройка генератора синхронизирующих сигналов.
Анализ таких систем имеет целью определить флюктуации моментов временных меток относительно положения, соответствующих идеальной работе. В нашем случае мы будем считать, что система синхронизации работает идеально. В качестве показателя точности можно взять среднеквадратическую ошибку, которая для нормальной работы должна быть много меньше длительности одного символа.