
 К
К







|












 СР
СР
















 | |||
 | |||
 DF
DF

 М ГИ DQ(РЭ)
М ГИ DQ(РЭ)

|

 Fi
Fi
БС
|
 | |||
 | |||
 ДБ
ДБ
Dsi
|


 B, H, s0(FZ)
B, H, s0(FZ)
 | |||
 |
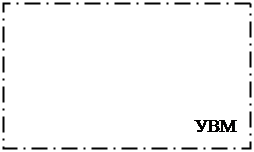
Рис. 3.
М – моталка; П и ОРВ – противоизгиб и охлаждение рабочих валков; ДБ – деблок; Д – дисплей (остальные обозначения в тексте)
Регулирование плоскостности может быть осуществлено по нескольким cхемам:
1) ручное управление гидроизгибом рабочих валков и распределением охлаждающей эмульсии по секциям коллектора;
2) ручное управление гидроизгибом и автоматическое управление охлаждением рабочих валков;
3) автоматическое управление гидроизгибом и ручное управление охлаждением рабочих валков;
4) автоматическое управление гидроизгибом и охлаждением рабочих валков.
Фактические значения отклонений удельных натяжений от среднего значения натяжения рассчитываются в блоке обработки сигналов и передаются в УВМ [1]. По отклонениям  УВМ вычисляет:
УВМ вычисляет:  - неравномерность натяжения по ширине полосы, используемую для вычисления усилия гидроизгиба
- неравномерность натяжения по ширине полосы, используемую для вычисления усилия гидроизгиба
 , ,
| (2) |
где  - результат усреднения
- результат усреднения  по четырем средним секциям стрессометра;
по четырем средним секциям стрессометра;  - результат усреднения по шести крайним (три справа и три слева) занятым полосой секциям;
- результат усреднения по шести крайним (три справа и три слева) занятым полосой секциям;  - отклонения натяжения, используемые для вычисления расхода СОЖ по девяти зонам коллектора: j = 1, 2, …, 9;
- отклонения натяжения, используемые для вычисления расхода СОЖ по девяти зонам коллектора: j = 1, 2, …, 9;  - результат усреднения по четырем секциям стрессометра, соответствующим j-й зоне коллектора охлаждения (ширина зоны коллектора - 208 мм, секции стрессометра – 52 мм) [1].
- результат усреднения по четырем секциям стрессометра, соответствующим j-й зоне коллектора охлаждения (ширина зоны коллектора - 208 мм, секции стрессометра – 52 мм) [1].
Усилие гидроизгиба рабочих валков определяется из выражения:

| (3) |
где  - изменение толщины полосы под действием приложенного усилия гидроизгиба;
- изменение толщины полосы под действием приложенного усилия гидроизгиба;  - расстояние между точками приложения усилия (между гидроцилиндрами);
- расстояние между точками приложения усилия (между гидроцилиндрами);  - усилие гидроизгиба; E – модуль Юнга; E » 2,2×105 МПа (для материала валков); J – момент инерции тела вращения (валка),
- усилие гидроизгиба; E – модуль Юнга; E » 2,2×105 МПа (для материала валков); J – момент инерции тела вращения (валка),  м4.
м4.
Из условия  и с учетом распределения усилия на два гидроцилиндра получается выражение для расчета усилия гидроизгиба
и с учетом распределения усилия на два гидроцилиндра получается выражение для расчета усилия гидроизгиба
 , ,
| (4) |
где  = 0,003 м3 – постоянная, заложенная инофирмой в алгоритм расчета); h - толщина полосы на входе 5-й клети стана.
= 0,003 м3 – постоянная, заложенная инофирмой в алгоритм расчета); h - толщина полосы на входе 5-й клети стана.
Задаваемое (регулировочное) усилие гидроизгиба на к -ом шаге ( ) вычисляется по формуле:
) вычисляется по формуле:
 , ,
| (5) |
где  - рассчитанное по формуле (5) значение усилия на к -ом шаге; m – коэффициент пропорциональности, m = 0,7.
- рассчитанное по формуле (5) значение усилия на к -ом шаге; m – коэффициент пропорциональности, m = 0,7.
Алгоритм управления гиброизгибом предусматривает ограничение усилия:  Кн. Величина
Кн. Величина  преобразуется в аналоговый сигнал и поступает в блок управления, где в соответствии с величиной сигнала регулируется давление в гидроцилиндрах.
преобразуется в аналоговый сигнал и поступает в блок управления, где в соответствии с величиной сигнала регулируется давление в гидроцилиндрах.
Для расчета регулировочного значения расхода СОЖ ( ) применяются формулы:
) применяются формулы:
 , ,
| (13) |
где KQ – коэффициент передачи на неравномерность натяжения () от расхода СОЖ (заложен инофирмой непосредственно в алгоритм управления). Величина  выдается в импульсном режиме и преобразуется в аналоговый сигнал в схемах технологической автоматики, где по нему осуществляется управление магнитными вентилями в системе подачи смазочно-охлаждающей эмульсии. Оба канала функционируют по принципу обратной связи (по отклонениям) независимо друг от друга.
выдается в импульсном режиме и преобразуется в аналоговый сигнал в схемах технологической автоматики, где по нему осуществляется управление магнитными вентилями в системе подачи смазочно-охлаждающей эмульсии. Оба канала функционируют по принципу обратной связи (по отклонениям) независимо друг от друга.