При соединении треугольником конец одной обмотки соединяется с началом другой. Таким образом, образуется замкнутый контур.
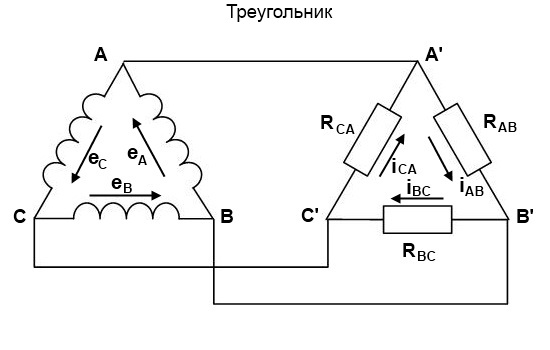
В таком соединении каждая фаза находится под линейным напряжением, то есть линейные и фазные напряжения равны
А фазные и линейные токи соотносятся как

Аналогичным способом, сделаем вывод для соединения треугольником: в симметричной трехфазной цепи при соединении фаз треугольником токи отличаются друг от друга в 1,72 раз, а линейные и фазные напряжения равны.
Вопрос №24
Соединение звездой
При соединении обмоток звездой все три фазы имеют одну общую точку – ноль. При этом такая система может быть трехпроводной или четырехпроводной. В последнем случае используется нулевой провод. Нулевой провод не нужен, если система симметрична, то есть токи в фазах такой системы одинаковы. Но если нагрузка несимметрична, то фазные токи различны, и в нулевом проводе возникает ток, который равен векторной сумме фазных токов

Также, нулевой провод может выступать в роле одной из фаз, если она выйдет из строя, это предотвратит выход из строя всей системы. Правда нужно учитывать, что нулевой провод не рассчитан на подобные нагрузки, и в целях экономии металла и изоляции он изготавливает под более малые токи, чем в фазах.

В трехфазных цепях существуют так называемые фазные и линейные напряжения и токи.
Фазное напряжение – это разность потенциалов между нулевой точкой и линейным проводом. То есть, проще говоря, фазное напряжение - это напряжение на фазе.
Линейное напряжение – это разность потенциалов между линейными проводами.

При соединении звездой фазные и линейные напряжения соотносятся как
А фазные и линейные токи при симметричной нагрузке одинаковы

Таким образом, можно сделать вывод, что в симметричной трехфазной цепи при соединении фаз звездой напряжения отличаются друг от друга в 1,72 раз, а линейные и фазные токи равны.
Вопрос 28
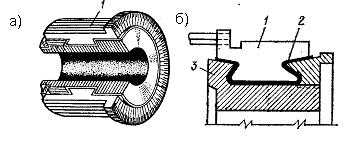
Схема однофазного двухобмоточного трансформатора представлена ниже. 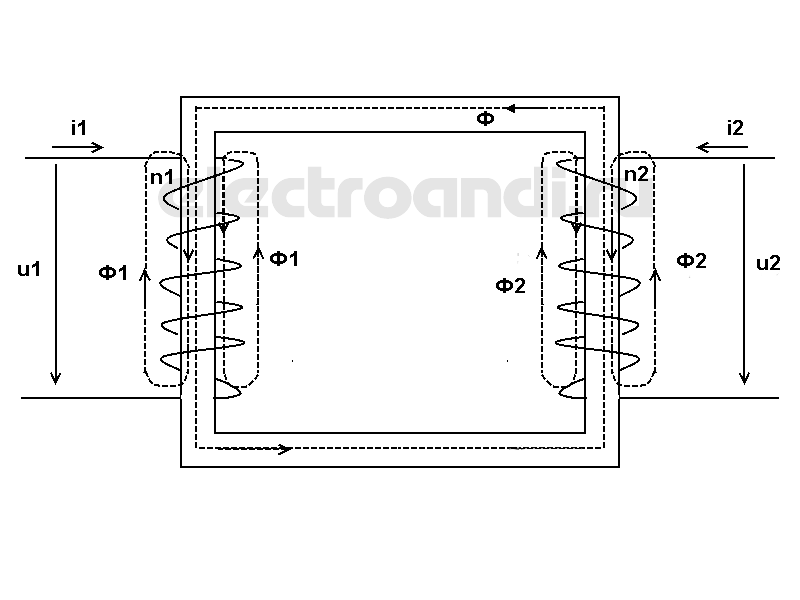
На схеме изображены основные части: ферромагнитный сердечник, две обмотки на сердечнике. Первая обмотка и все величины которые к ней относятся (i1-ток, u1-напряжение, n1-число витков,Ф1 – магнитный поток) называют первичными, вторую обмотку и соответствующие величины - вторичными.
Первичную обмотку включают в сеть с переменным напряжением, её намагничивающая сила i1n1 создает в магнитопроводе переменный магнитный поток Ф, который сцеплен с обеими обмотками и в них индуцирует ЭДС e1= -n1dФ/dt, e2= -n2dФ/dt. При синусоидальном изменении магнитного потока Ф = Фm sinωt, ЭДС равно e = Em sin (ωt-π/2). Для того чтобы посчитать действующее значение ЭДС нужно воспользоваться формулой E=4.44 f n Фm, где f- циклическая частота, n – количество витков, Фm – амплитуда магнитного потока. Причем если вы хотите посчитать величину ЭДС в какой либо из обмоток, нужно вместо n подставить число витков в данной обмотке.
Конструкция обмоток, их изоляция и способы крепления на стержнях зависят от мощности трансформатора. Для их изготовления применяют медные провода круглого и прямоугольного сечения, изолированные хлопчатобумажной пряжей или кабельной бумагой. Обмотки должны быть прочными, эластичными, иметь малые потери энергии и быть простыми и недорогими в изготовлении.
В обмотке и сердечнике трансформатора наблюдаются потери энергии, в результате которых выделяется тепло. В связи с этим трансформатору требуется охлаждение. Некоторые маломощные трансформаторы отдают свое тепло в окружающую среду, при этом температура установившегося режима не влияет на работу трансформатора. Такие трансформаторы называют “сухими”, т.е. с естественным воздушным охлаждением. Но при средних и больших мощностях, воздушное охлаждение не справляется, вместо него применяют жидкостное, а точнее масляное. В таких трансформаторах обмотка и магнитопровод помещены в бак с трансформаторным маслом, которое усиливает электрическую изоляцию обмоток от магнитопровода и одновременно служит для их охлаждения. Масло принимает теплоту от обмоток и магнитопровода и отдает ее стенкам бака, с которых тепло рассеивается в окружающую среду. При этом слои масла имеющие разницу в температуре циркулируют, что улучшает теплообмен. Трансформаторам с мощностью до 20-30 кВА хватает охлаждения бака с гладкими стенками, но при больших мощностях устанавливаются баки с гофрированными стенками. Также нужно учитывать что при нагреве масло имеет свойство увеличиваться в объеме, поэтому в высокомощных трансформаторах устанавливают резервные баки и выхлопные трубы (в случае если масло закипит, появятся пары которым нужен выход). В трансформаторах меньшей мощности ограничиваются тем, что масло не заливают до самой крышки.
Вопрос 29
На практике чаще всего встречаются следующие схемы соединений: Yy, Dy, Yd, Yz и Dz.
Схема соединений обмоток Yy используется, в основном, в трансформаторах небольшой номинальной мощности, питающих симметричные трёхфазные электроприемники. Иногда данный вид соединений применяется в схемах большой номинальной мощности, в том случае если требуются заземление нейтральной точки звезды.
Схема неудобна, принимая во внимание необходимость ограничения негативного влияния высших гармоник ряда v=3n (n=1,3,7…) в токе холостого хода при питании от трёхпроводной сети. Кроме того, она невыгодна при асимметричной нагрузке (токи нулевой последовательности), когда выведена нейтральная точка звезды вторичных обмоток. Это вызывает необходимость дополнительной, так называемой компенсационной, обмотки, соединённой в треугольник.
Схема соединения обмоток Dy используется, в основном, в понижающих трансформаторах большой мощности. Трансформаторы с таким соединением обмоток работают в составе систем питания токораспределительных сетей низкого напряжения. Как правило, нейтральная точка звёзды заземляется, обеспечивая возможность использования как линейного, так и фазного напряжений. Данное соединение очень выгодно, принимая во внимание сокращение третьей гармоники тока и токов нулевой последовательности при ассиметричной нагрузке.
Схема соединений обмоток Yd используется, в основном, в повышающих трансформаторах. Трансформатор с такой схемой соединений удобен, если нейтральная точка звезды первичной обмотки должна быть глухо заземлена или заземлена через дроссель. Соединение обмоток в треугольник в первичной или вторичной обмотках очень выгодно, из-за того, что третья гармоника намагничивающего тока протекает по замкнутой цепи треугольника и магнитный поток третьей гармоники практически отсутствует.
Схема соединений обмоток Yz и Dz используется, в основном, в понижающих трансформаторах небольшой номинальной мощностью. При такой схеме нейтральная точка соединения обмоток в зигзаг выведена на клеммную колодку для того, чтобы иметь возможность использовать фазные напряжения. Данное решение применяется редко, прежде всего, из экономических соображений. Сравнивая, например, звезду и зигзаг, при одинаковом номинальном токе и одинаковом сечении проводов, можно сделать вывод, что количество витков зигзага при одинаковом наименьшем линейном напряжении в 2/√3 раза превышает количество витков звезды, отсюда стоимость меди в зигзаге более чем на 15% превышает стоимость меди в звезде. Поэтому использование таких схем ограничивается, прежде всего, питанием асимметричных потребителей (например, в случае большого количества однофазных потребителей), когда необходимо симметричное распределение фазных напряжений во вторичной части трансформатора.
Коэффициентом трансформации трехфазного трансформатора называют отношение линейных напряжений обмотки ВН и обмотки НН в режиме холостого хода:
Кт = U 1/ U 2,
для трехобмоточных трансформаторов — отношение напряжений обмоток ВН/СН, ВН/НН и СН/НН. Коэффициент трансформации определяют для проверки соответствия паспортным данным, а также для проверки правильности подсоединения ответвлений обмоток к переключателям.

Рис. 4.1. Измерение коэффициента трансформации.
Измерения производят методом двух вольтметров класса точности не ниже 0,5, на всех ответвлениях обмоток и для всех фаз (рис.4.1). Подводимое напряжение должно быть трехфазным симметричным в пределах 5—100% номинального напряжения обмотки. В большинстве случаев подают напряжение 3 х 0,4 кВ со стороны ВН.
При испытании трехфазных трансформаторов измеряют линейные напряжения на одноименных зажимах обеих обмоток. Если возможно измерить фазные напряжения, то коэффициент трансформации можно определить и по фазным напряжениям.
Измеренный коэффициент трансформации не должен отличаться более чем на 2 % от значения, полученного на том же ответвлении других фаз, или от заводских данных. Для трансформаторов с РПН разница не должна превышать значения ступени регулирования. При испытании трехобмоточных трансформаторов достаточно определить коэффициент трансформации у двух пар обмоток, при этом желательно, чтобы в каждую проверяемую пару входила обмотка без ответвлений.
Вопрос 30
Устройство асинхронного двигателя основано на принципе воздействия вращающегося магнитного поля статора на коротко замкнутый виток - ротор.
Асинхронный двигатель в основном состоит из двух частей статора и ротора.
Статор:
· Основное назначение статора создать вращающееся магнитное поле.
· Обмотка статора классифицируется по числу пар полюсов и позволяет строить двигатели на различные числа оборотов.
Если n1=3000 об/мин то n2=2880 об/мин.
Если n1=1500 об/мин то n2=1460 об/мин.
Если n1=1000 об/мин то n2=960 об/мин.
Если n1=750 об/мин то n2=1460 об/мин.
· Максимальное число оборотов асинхронного двигателя при частоте 50 Гц 3000 об/мин.
Коротко замкнутый ротор:
Обмотка коротко замкнутого ротора представляет собой беличье колесо.

В каждый паз укладывается по одному голому медному стержню без изоляции.
Все концы проводников заворачиваются с двух сторон медными или алюминевыми шайбами.
Двигатель с фазным ротором:
У двигателей с фазным ротором в пазы укладывается трёхфазная обмотка, выполненая из провода с изоляцией.
Достоинства двигателя с короткозамкнутым ротором:
· приблизительно постоянная скорость при разных нагрузках;
· возможность кратковременных механических перегрузок;
· простота конструкции;
· простота пуска и легкость его автоматизации;
· более высокие cos φ и КПД, чем у электродвигателей с фазным ротором
Недостатки двигателя с короткозамкнутым ротором:
· затруднения в регулировании скорости вращения;
· большой пусковой ток;
· низкий cos φ при недогрузках.
31. Синхронные генераторы (устройство и принцип работы, характеристика холостого хода, внешняя и регулировочная характеристика)
Синхронный генератор – это машина переменного тока, преобразовывающая какой-либо вид энергии в электрическую энергию.
Генератором называется электрическая машина, преобразовывающая механическую энергию в электрическую.
Характеристика холостого хода. Основной магнитный поток синхронного генератора является функцией тока возбуждения, т. е. Ф0 (I в).
Если в (11.1) заменить f согласно (11.2), а магнитный поток записать как функцию тока возбуждения Ф0(I в), получим
| Е 0 = 4,44 kw | рn | Ф0(I в). |
Изменяя с помощью реостата r р (см. рис. 11.4) ток I в, можно менять тем самым поток Ф0 и, следовательно, ЭДС Е 0. Характеристика холостого хода синхронного генератора Е 0 (I в) не отличается от характеристики холостого хода генераторов постоянного тока (см. рис. 9.13) и определяется при тех же условиях, т. е. при I = 0 и n = const.
11.5.2. Внешние характеристики. внешняя характеристика генератора независимого возбуждения U (I) определяется при следующих условиях: n = const и I в = const. Так как напряжение синхронного генератора зависит при прочих равных условиях еще от характера нагрузки, то дополнительным условием, при котором следует определять внешнюю характеристику синхронного генератора, должно быть постоянство коэффициента мощности, т. е. cos φ = const.
Внешние характеристики синхронного генератора при активной (φ = 0), активно-индуктивной (φ > 0) и активно-емкостной (φ < 0) нагрузках приведены на рис. 11.6. Они являются наглядной иллюстрацией того, что говорилось в § 11.4 о влиянии характера нагрузки на напряжение генератора.
Относительное изменение напряжения генератора, %, оценивают по формуле
| Δ u ном = | U х - U ном | 100 = | Δ U ном | 100, |
| U ном | U ном |
где U х — напряжение генератора при холостом ходе (I = 0), равное ЭДС; U ном — напряжение при номинальной нагрузке (I = I ном).
В случае наиболее часто встречающейся активно-индуктивной нагрузки при cos φ ≈ 0,8 относительное изменение напряжения Δ u ном у некоторых генераторов доходит до 35 — 45%.
11.5.3. Регулировочные характеристики. Естественно, что поскольку напряжение синхронного генератора изменяется при изменении нагрузки в значительных пределах, необходимо принимать меры для уменьшения изменения напряжения. Этого можно добиться, очевидно, за счет соответствующего изменения ЭДС генератора E 0 путем воздействия на его ток возбуждения I в. О том, как и в каких пределах необходимо изменять ток возбуждения при изменении тока нагрузки генератора, чтобы поддерживать U = const, и дают представление регулировочные характеристики (рис. 11.7).
Дополнительным условием, при котором должна определяться каждая из характеристик (кроме n = const), является cos φ = const.
Следует обратить внимание на то, что для нормальных условий работы приемников электрической энергии необходимо поддерживать напряжение и частоту синхронного генератора на заданных уровнях. Для этого синхронные генераторы снабжаются в большинстве случаев регуляторами, управляющими напряжением и частотой вращения генераторов и воздействующими на ток возбуждения генераторов и момент первичного двигателя.
Внешние характеристики синхронного генератора 
 Регулировочные характеристики синхронного генератора
Регулировочные характеристики синхронного генератора
32. Синхронный двигатель.Принцип действия и устройство. Синхронный двигатель может работать в качестве генератора и двигателя. Синхронный двигатель выполнен так же, как и синхронный генератор. Его обмотка якоря I (рис. 291, а) подключена к источнику трехфазного переменного тока; в обмотку возбуждения 2 подается от постороннего источника постоянный ток. Благодаря взаимодействию вращающегося магнитного поля 4, созданного трехфазной обмоткой якоря, и поля, созданного обмоткой возбуждения, возникает электромагнитный момент М (рис. 291,б), приводящий ротор 3 во вращение. Однако в синхронном двигателе в отличие от асинхронного ротор будет разгоняться до частоты вращения n = n1, с которой вращается магнитное поле (до синхронной частоты вращения). Объяс-
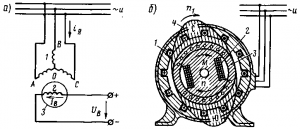 Рис. 291. Электрическая (а) и электромагнитная (б) схемы синхронного электродвигателя
Рис. 291. Электрическая (а) и электромагнитная (б) схемы синхронного электродвигателя
няется это тем, что ток в обмотку ротора подается от постороннего источника, а не индуцируется в нем магнитным полем статора и, следовательно, не зависит от частоты вращения вала двигателя. Характерной особенностью синхронного двигателя является постоянная частота вращения его ротора независимо от нагрузки.
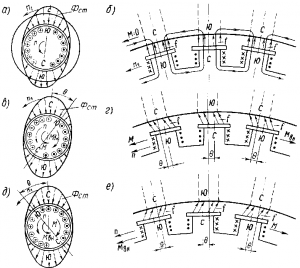
Электромагнитный момент. Электромагнитный момент в синхронном двигателе возникает в результате взаимодействия магнитного потока ротора (потока возбуждения Фв) с вращающимся магнитным полем, создаваемым трехфазным током, протекающим по обмотке якоря (потоком якоря Фв). При холостом ходе машины оси магнитных полей статора и ротора совпадают (рис. 292,а). Поэтому электромагнитные силы I, возникающие между «полюсами» статора и полюсами ротора, направлены радиально (рис. 292, б) и электромагнитный момент машины равен нулю. При работе машины в двигательном режиме (рис. 292, в и г) ее ротор под действием приложенного к валу внешнего нагрузочного момента Мвн смещается на некоторый угол 0 против направления вращения. В этом случае в результате электромагнитного взаимодействия между ротором и статором создаются электромагнитные силы I, направленные по направлению вращения, т. е. образуется вращающий электромагнитный момент М, который стремится преодолеть действие внешнего момента Мвн. Максимум момента Мmax
соответствует углу? = 90°, когда оси полюсов ротора расположены между осями «полюсов» статора.
Если нагрузочный момент Мвн, приложенный к валу электродвигателя, станет больше Мmax, то двигатель под действием внешнего момента Мвн останавливается; при этом по обмотке якоря неподвижного двигателя будет протекать очень большой ток. Этот режим называется выпаданием из синхронизма, он является аварийным и не должен допускаться.
При работе машины в генераторном режиме (рис. 292, д и е) ротор под действием приложенного к валу внешнего момента Мвн смещается на угол? по направлению вращения. При этом создаются электромагнитные силы, направленные против вращения, т. е. образуется тормозной электромагнитный момент М. Таким образом, при изменении значения и направления внешнего момента на валу ротора Мвн изменяется лишь угол? между осями полей статора и ротора, в то время как в асинхронной машине в этом случае изменяется частота вращения ротора.
Пуск в ход и регулирование частоты вращения. Синхронный двигатель не имеет начального пускового момента. Если подключить обмотку якоря к сети переменного тока, когда ротор неподвижен, а по обмотке возбуждения проходит постоянный ток, то за один период изменения тока электромагнитный момент будет дважды менять свое направление, т. е. средний момент за период будет равен нулю. Следовательно, для пуска в ход синхронного двигателя необходимо разогнать его ротор с помощью внешнего момента до частоты вращения, близкой к синхронной. Для этой цели применяют метод асинхронного пуска. Синхронный двигатель пускают в ход как асинхронный, для чего его снабжают специальной короткозамкнутой пусковой обмоткой 3 (рис. 293). В полюсные наконечники ротора 2 синхронного двигателя закладывают медные или латунные стержни, замкнутые накоротко двумя торцовыми кольцами. Пусковая обмотка выполнена подобно беличьей клетке асинхронной машины, но занимает лишь часть окружности ротора. В некоторых двигателях специальная короткозамкнутая обмотка
Достоинства и недостатки синхронного двигателя в сравнении с асинхронным. Синхронные двигатели имеют следующие достоинства:
а) возможность работы при cos φ = 1; это приводит к улучшению cos φ сети, а также к сокращению размеров двигателя, так как его ток меньше тока асинхронного двигателя той же мощности. При работе с опережающим током синхронные двигатели служат генераторами реактивной мощности, поступающей в асинхронные двигатели, что снижает потребление этой мощности от генераторов электростанций;
б) меньшую чувствительность к колебаниям напряжения, так как их максимальный момент пропорционален напряжению в первой степени (а не квадрату напряжения);
в) строгое постоянство частоты вращения независимо от механической нагрузки на валу.
Недостатками синхронных двигателей являются:
а) сложность конструкции;
б) сравнительная сложность пуска в ход (см. § 6.14);
в) трудности с регулированием частоты вращения, которое возможно только путем изменения частоты питающего напряжения.
Указанные недостатки синхронных двигателей делают их менее выгодными, чем асинхронные двигатели, при ограниченных мощностях до 100 кВт. Однако при более высоких мощностях, когда особенно важно иметь высокий cos φ и уменьшенные габаритные размеры машины, синхронные двигатели предпочтительнее асинхронных.
Механической характеристикой синхронного двигателя называется зависимость частоты вращения от момента двигателя. В синхронном двигателе частота вращения ротора постоянна и от нагрузки не зависит. Поэтому механическая характеристика n(M) (рис. 4.18) – прямая, параллельная оси абсцисс. 
Пуск синхронного двигателя при помощи вспомогательного двигателя. Если ротор синхронного двигателя с возбужденными полюсами развернуть другим, вспомогательным двигателем до скорости вращения поля статора, то магнитные полюсы статора, взаимодействуя с полюсами ротора, заставят ротор вращаться далее самостоятельно без посторонней помощи, в такт с полем статора, т. е. синхронно (откуда эти двигатели и получили свое название).
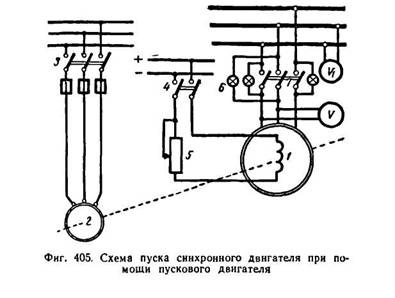
На фиг. 405 показана схема пуска оинхрониого двигателя 1 с помощью вспомогательного асинхронного двигателя 2.
Для осуществления пуска необходимо, чтобы число пар полюсов асинхронного двигателя было меньше числа пар полюсов синхронного двигателя, ибо при этих условиях вспомогательный асинхронный двигатель может развернуть ротор синхронного двигателя до синхронной скорости.
Порядок пуска синхронного двигателя следующий. Включая рубильник 3, пускают вспомогательный асинхронный двигатель 2, который разворачивает ротор синхронного двигателя 1 до скорости, соответствующей скорости поля статора. Скорость вращения вспомогательного двигателя определяется по тахометру1. Затем, включая рубильник 4 постоянного тока, возбуждают полюсы ротора. Чтобы включить синхронный двигатель в сеть трехфазного тока, его нужно синхронизировать так же, как и при включении синхронного генератора на параллельную работу. Для этого реостатом 5 устанавливают такое возбуждение, чтобы напряжение обмотки статора по вольтметру V было равно напряжению сети, указываемому вольтметром V1.

|
Электролампы 6, включенные параллельно ножам рубильника 7 трех-фазной сети, при разомкнутом рубильнике будут мигать. Сначала мигание будет частым, но если изменять скорость вращения вспомогательного асинхронного двигателя, то лампы будут мигать. все реже и реже. Синхронный двигатель можно включить в сеть трехфазного тока рубильником 7 тогда, когда все три лампы одновременно погаснут. Ротор двигателя при этом входит в синхронизм и может далее вращаться самостоятельно. Теперь
вспомогательный двигатель 2 рубильником 3 можно отключить от сети.
Сложность пуска и необходимость вспомогательного двигателя являются существенными недостатками этого способа пуска синхронных двигателей. Поэтому в настоящее время он применяется редко.
Асинхронный пуск синхронного двигателя. Для осуществления этого способа пуска в полюсных наконечниках полюсов ротора укладывается дополнительная короткозамкнутая обмотка. Так как во время пуска в обмотке возбуждения 1 двигателя наводится большая э. д. с, то по соображениям безопасности она замыкается рубильником 2 на сопротивление 3 (фиг. 406).
При включении напряжения трехфазной сети в обмотку статора 4 синхронного двигателя возникает вращающееся магнитное поле, которое, пересекая короткозамкнутую (пусковую) обмотку, заложенную в полюсных наконечниках ротора, индуктирует в ней токи.
Эти токи, взаимодействуя с вращающимся полем статора, приведут ротор во вращение. При достижении ротором наибольшего числа оборотов (95—97% синхронной скорости) рубильник 2 переключают так, чтобы обмотку ротора включить в сеть постоянного напряжения.
Недостатком асинхронного пуска является большой пусковой ток (в 5—7 раз больший рабочего тока). Пусковой ток вызывает падение напряжения в сети, а это отражается на работе других потребителей. Для уменьшения пускового тока применяют пуск при пониженном напряжении с помощью реактора 2 или автотрансформатора.
В настоящее время применяют почти исключительно асинхронный пуск синхронных двигателей ввиду его простоты и надежности. Существуют также схемы автоматического асинхронного пуска синхронных двигателей.
1 Тахометр — прибор, измеряющий скорость вращения машины.
2 Реактор — индуктивное сопротивление, выполненное в виде катушки без стального сердечника.
33 устройство и принцип работы машин постоянного тока
Устройство статора.
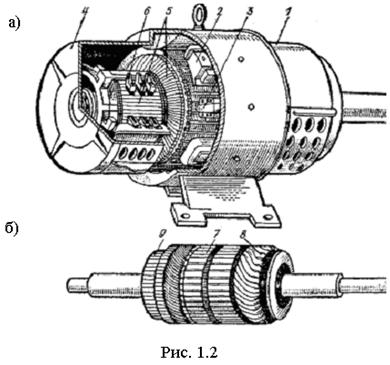
Машина постоянного тока состоит из двух основных частей: неподвижной – статора и вращающейся – ротора, называемого в машинах постоянного тока якорем. Эскиз машины постоянного тока показан на рис. 1.1, а общий вид с разрезом — на рис.
1.2. Статор состоит из станины 1, главных полюсов 2, дополнительных полюсов 3, подшипниковых щитов 4 и щеточной траверсы со щетками 6.
Станина имеет кольцевую форму и изготовляется из стального литья или стального листового проката. Она составляет основу всей машины и, кроме того, выполняет функцию магнитопровода.
Главные полюсы служат для создания постоянного во времени и неподвижного в пространстве магнитного поля. С этой целью по обмотке полюсов пропускается постоянный ток, называемый током возбуждения (в машинах малой мощности в качестве полюсов могут использоваться постоянные магниты).
Дополнительные полюсы устанавливаются между главными и служат для улучшения условий коммутации.

Подшипниковые щиты закрывают статор с торцов. В них впрессовываются подшипники и укрепляется щеточная траверса, которая с целью регулирования может поворачиваться. На щеточной траверсе закреплены пальцы, которые электрически изолированы от траверсы. На пальцах установлены щеткодержатели со щетками, изготовленными из графита или смеси графита с медью.
Устройство якоря.
Вращающаяся часть машин – якорь 9 (рис. 1.1, 1.2, а, б) состоит из сердечника 7, обмотки 8 и коллектора 5.
Сердечник имеет цилиндрическую форму. Он набирается из колец или сегментов листовой электротехнической стали, на внешней поверхности которых выштампованы пазы. В пазы сердечника укладываются секции из медного провода. Концы секций, которые выводятся на коллектор и припаиваются к его пластинам, образуют замкнутую обмотку якоря.
Коллектор (рис. 1.3) набран из медных пластин клинообразной формы, изолированных друг от друга, и корпуса 3 миканитовыми прокладками 2, образующими в сборе цилиндр, который крепится на валу якоря.