1.прямой пуск применяют в основном для двигателей малой мощности (до нескольких сотен ватт), в которых сопротивление Σ Rа относительно велико, и лишь в отдельных случаях для двигателей с последовательным возбуждением мощностью в несколько киловатт
2.Рассмотрим процесс реостатного пуска на примере двигателя с параллельным возбуждением. В начальный период пуск осуществляется по реостатной характеристике б (рис. 8.65,а), соответствующей максимальному значению сопротивления Rппускового реостата; при этом двигатель развивает максимальный пусковой момент М пmах. Регулировочный реостат R р.в в этом случае выводится так, чтобы ток возбуждения I в и поток Ф были максимальными. По мере разгона момент двигателя уменьшается, так как с увеличением частоты вращения возрастает ЭДС Е и уменьшается ток якоря. При достижении некоторого значения М пmin часть сопротивления пускового реостата выводится, вследствие чего момент снова возрастает до М пmах
Таким образом, уменьшая постепенно сопротивление пускового реостата, осуществляют разгон двигателя
3. 3. При реостатном пуске возникают довольно значительные погери энергии в пусковом реостате. Этот недостаток можно устранить, если пуск двигателя осуществить путем плавного повышения напряжения, подаваемого на его обмотку. Однако для этого необходимо иметь отдельный источник постоянного тока с регулируемым напряжением (генератор или управляемый выпрямитель). Такой источник используют также для регулирования частоты вращения двигателя
Вопрос
Частота вращения двигателя постоянного тока может регулироваться двумя способами: 1)изменением напряжения якоря или 2)изменением тока возбуждения. Сейчас обычно первый метод используется, напряжение меняется с помощью полупроводниковых преобразователей.
|
|
частоту вращения ротора можно регулировать изменением любого из трёх параметров, определяющих её, т.е. изменением частоты тока сети f1, числа пар полюсов р, скольжения S.
Регулирование частоты вращения асинхронного двигателя изменением числа пар полюсов возможно, если на статоре имеется несколько обмоток (обычно две) с различным числом полюсов.
Регулирование частоты вращения изменением числа полюсов применяется в двигателях с короткозамкнутым ротором, а в двигателях с фазным ротором этот способ не используется.
Скольжение можно изменять регулировочным реостатом, введенным в цепь обмотки ротора, а также изменением напряжения сети.
Вопрос
Реверсирование.
Реверсирование двигателя осуществляется либо изменением полярности напряжения на обмотке якоря, либо на обмотке возбуждения. В обоих случаях изменяется знак электромагнитного момента двигателя Мэм и соответственно направление вращения ротора
Вопрос
Механическая характеристика
Зависимость частоты от момента на валу ДПТ отображается в виде графика. Горизонтальная ось (абсцисс) — момент на валу ротора, вертикальная ось (ординат) — частота вращения ротора. Механическая характеристика ДПТ есть прямая, идущая с отрицательным наклоном.
Механическая характеристика ДПТ строится при определённом напряжении питания обмоток ротора. В случае построения характеристик для нескольких значений напряжения питания говорят о семействе механических характеристик ДПТ.
|
|
Регулировочная характеристика
Зависимость частоты вращения ротора от напряжения питания обмоток ротора ДПТ, отображается в виде графика. Горизонтальная ось (абсцисс) — напряжение питания обмоток ротора, вертикальная ось (ординат) — частота вращения ротора. Регулировочная характеристика ДПТ есть прямая, идущая с положительным наклоном.
Регулировочная характеристика ДПТ строится при определённом моменте, развиваемом двигателем. В случае построения регулировочных характеристик для нескольких значений момента на валу ротора, говорят о семействе регулировочных характеристик ДПТ.
Вопрос
Асинхронный электродвигатель с короткозамкнутым ротором является самым распространенным из электрических двигателей, применяемых в промышленности. Рассмотрим его устройство. На неподвижной части двигателя – статоре 1 – размещается трехфазная обмотка 2 (рис. 2), питаемая трехфазным током. Начала трех фаз этой обмотки выводятся на общий щиток, укрепленный снаружи на корпусе электродвигателя.
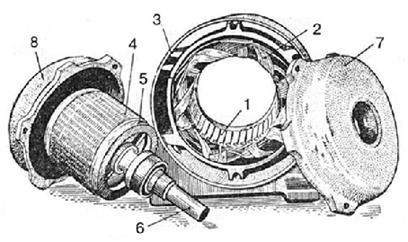
Рис. 2. Асинхронный электродвигатель с короткозамкнутым ротором
Собранный сердечник статора укрепляют в чугунном корпусе 3 двигателя. Вращающуюся часть двигателя – ротор 4 – собирают также из отдельных листов стали. В пазы ротора закладывают медные стержни, которые с двух сторон припаивают к медным кольцам
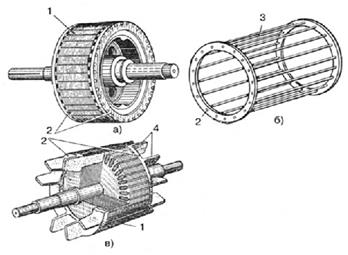
Рис. 3. Короткозамкнутый ротор
а - ротор с короткозамкнутой обмоткой, б - "беличье колесо",
в - короткозамкнутый ротор, залитый алюминием;
1 - сердечник ротора, 2 - замыкающие кольца, 3 - медные стержни,
4 - вентиляционные лопатки
Таким образом, все стержни оказываются замкнутыми с двух сторон накоротко. Если представить себе отдельно обмотку такого ротора, то она по внешнему виду будет напоминать «беличье колесо». В настоящее время у всех двигателей мощностью до 100 кВт «беличье колесо» делается из алюминия путем заливки его под давлением в пазы ротора. Вал 6 вращается в подшипниках, закрепленных в подшипниковых щитах 7 и 8. Щиты при помощи болтов крепятся к корпусу двигателя. На один конец вала ротора насаживается шкив для передачи вращения рабочим машинам или станкам
|
|
Вопрос
В основе работы асинхронных двигателей лежит вращающееся магнитное поле, создаваемое МДС(магнитодвижущая сила) обмоток статора.
Принцип получения вращающегося магнитного поля с помощью неподвижной системы проводников заключается в том, что если по системе неподвижных проводников, распределенных в пространстве по окружности, протекают токи, сдвинутые по фазе, то в пространстве создается вращающееся поле. Если система проводников симметрична, а угол сдвига фаз между токами соседних проводников одинаков, то амплитуда индукции вращающегося магнитного поля и скорость постоянны. Если окружность с проводниками развернуть на плоскость, то с помощью подобной системы можно получить «бегущее» поле.
Вопрос
Вращающееся магнитное поле статора представим в виде постоянного магнита, вращающегося с синхронной частотой вращения n1.
В проводниках замкнутой обмотки ротора индуктируются токи. Полюса магнита перемещаются по часовой стрелке.
Наблюдателю, разместившемуся на вращающемся магните, кажется, что магнит неподвижен, а проводники роторной обмотки перемещаются против часовой стрелки.
Направления роторных токов, определенные по правилу правой руки
Пользуясь правилом левой руки, найдем направление электромагнитных сил, действующих на ротор и заставляющих его вращаться. Ротор двигателя будет вращаться с частотой вращения n2 в направлении вращения поля статора. Ротор вращается асинхронно т.е частота вращения его n2 меньше частоты вращения поля статора n1.
С увеличением нагрузки на валу двигателя тормозной момент становится больше вращающего, и скольжение увеличивается. Вследствие этого, возрастают индуктированные в роторной обмотке ЭДС и токи. Вращающий момент увеличивается и становится равным тормозному моменту. Вращающий момент может возрастать с увеличением скольжения до определенного максимального значения, после чего при дальнейшем увеличении тормозного момента вращающий момент резко уменьшается, и двигатель останавливается.
Скольжение заторможенного двигателя равно единице. Говорят, что двигатель работает в режиме короткого замыкания.
Частота вращения ненагруженного асинхронного двигателя n2 приблизительно равна синхронной частоте n1. Скольжение ненагруженного двигателя S &asimp; 0. Говорят, что двигатель работает в режиме холостого хода.
Скольжение асинхронной машины, работающей в режиме двигателя, изменяется от нуля до единицы.
Асинхронная машина может работать в режиме генератора. Для этого ее ротор необходимо вращать сторонним двигателем в направлении вращения магнитного поля статора с частотой n2 > n1. Скольжение асинхронного генератора
Асинхронная машина может работать в режиме электромашинного тормоза. Для этого необходимо ее ротор вращать в направлении, противоположном направлению вращения магнитного поля статора.
Вопрос
При пуске двигателя по возможности должны удовлетворяться основные требования: процесс пуска должен осуществляться без сложных пусковых устройств; пусковой момент должен быть достаточно большим, а пусковые токи - по возможности малыми.
1)Прямой пуск. Этот способ применяют для пуска асинхронных двигателей с короткозамкнутым ротором.
Двигатели обычно пускают с помощью электромагнитного выключателя К - магнитного пускателя (рис. 4.27, а) и разгоняют автоматически по естественной механической характеристике М (рис. 4.27,6) от точки П, соответствующей начальному моменту пуска, до точки Р, соответствующей условию М = М ст. Ускорение при разгоне определяется разностью абсцисс кривых М и М ст и моментом инерции ротора двигателя и механизма, который приводится во вращение.
2)Пуск с помощью реостата в цепи ротора. Этот способ применяют для пуска двигателей с фазным ротором. Если в цепь ротора включить пусковой реостат R п, то активное сопротивление цепи ротора увеличится, вследствие чего точка К на круговой диаграмме (рис. 4.30, а) сместится ближе к точке О (точка К'). При этом максимальный момент (отрезок А м Е м) не изменяется, а пусковой момент возрастает от значения М п до М' п, так как увеличивается отрезок КЕ п, пропорциональный этому моменту. Одновременно повышается критическое скольжение, а поэтому зависимость М =f (s) сдвигается в область больших скольжений, а зависимость п 2= f (М) — в область меньших частот вращения
Вопрос
Способы регулирования частоты вращения асинхронного двигателя:
частоту вращения ротора можно регулировать изменением любого из трёх параметров, определяющих её, т.е. изменением частоты тока сети f1, числа пар полюсов р, скольжения S.
1)Регулирование частоты вращения асинхронного двигателя изменением числа пар полюсов возможно, если на статоре имеется несколько обмоток (обычно две) с различным числом полюсов.
2)Регулирование частоты вращения изменением числа полюсов применяется в двигателях с короткозамкнутым ротором, а в двигателях с фазным ротором этот способ не используется.
3)Скольжение можно изменять регулировочным реостатом, введенным в цепь обмотки ротора, а также изменением напряжения сети.
Вопрос
Скольжение асинхронного двигателя — Разность скоростей вращения магнитного поля статора и ротора асинхронного двигателя. Скольжение может измеряться в относительных единицах и в процентах
s = (n1 - n2) / n2, где n1- синхронная скорость вращения поля, об/мин, n2 - скорость вращения ротора асинхронного двигателя, об/мин.
По мере ускорения ротора частота тока в нем будет определяться скольжением асинхронного двигателя
Величина эквивалентного сопротивления асинхронного двигателя с изменением скольжения изменяется по сложному закону. При уменьшении скольжения в пределах 1 - 0,15 сопротивление увеличивается, как правило, не более чем в 1,5 раза, в пределах от 0,15 до sном в 5-7 раз по отношению к начальному значению при пуске.
Вопрос
Назначение трансформатора. Трансформатором называется статический электромагнитный аппарат, преобразующий переменный ток одного напряжения в переменный ток другого напряжения той же частоты.
Трансформаторы позволяют значительно повысить напряжение, вырабатываемое источниками переменного тока, установленными на электрических станциях, и осуществить передачу электроэнергии на дальние расстояния при высоких напряжениях (110, 220, 500, 750 и 1150 кВ). Благодаря этому сильно уменьшаются потери энергии в проводах и обеспечивается возможность значительного уменьшения площади сечения проводов линий электропередачи.
Принцип действия трансформатора. Действие трансформатора основано на явлении электромагнитной индукции. К одной из обмоток подается электрическая энергия от источника переменного тока. Эту обмотку называют первичной. К другой обмотке, называемой вторичной, подключают потребители (непосредственно или через выпрямитель).
При подключении трансформатора к источнику переменного тока (электрической сети) в витках его первичной обмотки протекает переменный ток i1, образуя переменный магнитный поток Ф. Этот поток проходит по магнитопроводу трансформатора и, пронизывая витки первичной и вторичной обмоток, индуцирует в них переменные э. д. с. е1 и е2. Если к вторичной обмотке присоединен какой-либо приемник, то под действием э. д. с. е2 по ее цепи проходит ток i2.
Отношение э. д. с. Евн обмотки высшего напряжения к э. д. с. Eнн обмотки низшего напряжения (или отношение чисел их витков) называется коэффициентом трансформации. Коэффициент трансформации всегда больше единицы.
Вопрос
Передача мощности от одной обмотки к другой происходит электромагнитным путем, при этом часть мощности, поступающей к трансформатору из питающей электрической сети, теряется в трансформаторе. Потерянную часть мощности называют потерями.
Потери мощности в трансформаторе являются одной из основных характеристик экономичности конструкции трансформатора. Полные нормированные потери состоят из потерь холостого хода (XX) и потерь короткого замыкания (КЗ). При холостом ходе (нагрузка не присоединена), когда ток протекает только по обмотке, присоединенной к источнику питания, а в других обмотках тока нет, мощность, потребляемая от сети, расходуется на создание магнитного потока холостого хода, т.е. на намагничивание магнитопровода, состоящего из листов трансформаторной стали. Поскольку переменный ток изменяет свое направление, то направление магнитного потока также меняется. Это значит, что сталь намагничивается и размагничивается попеременно. При изменении тока от максимума до нуля сталь размагничивается, магнитная индукция уменьшается, но с некоторым запаздыванием, т.е. размагничивание задерживается (при достижении нулевого значения тока индукция не равна нулю точка N). Задерживание в перемагничивании является следствием сопротивления стали переориентировке элементарных магнитов.
Кривая намагничивания при перемене направления тока образует так называемую петлю гистерезиса, которая различна для каждого сорта стали и зависит от максимальной магнитной индукции Втах. Площадь, охватываемая петлей, соответствует мощности, затрачиваемой на намагничивание. Так как при перемагничивании сталь нагревается, электрическая энергия, подводимая к трансформатору, преобразуется в тепловую и рассеивается в окружающее пространство, т.е. безвозвратно теряется. В этом физически и заключаются потери мощности на перемагничивание.
Кроме потерь на гистерезис при протекании магнитного потока по магнитопроводу возникают потери на вихревые токи. Как известно, магнитный поток индуктирует электродвижущую силу (ЭДС), создающую ток не только в обмотке, находящейся на стержне магнитопровода, но и в самом его металле. Вихревые токи протекают по замкнутому контуру (вихревое движение) в месте стали в направлении, перпендикулярном направлению магнитного потока. Для уменьшения вихревых токов магнитопровод собирают из отдельных изолированных листов стали. При этом чем тоньше лист, тем меньше элементарная ЭДС, меньше созданный ею вихревой ток, т.е. меньше потери мощности от вихревых токов. Эти потери тоже нагревают магнитопровод. Для уменьшения вихревых токов, потерь и нагревов увеличиваютэлектрическое сопротивление
стали путем введения в металл присадок.Внешняя характеристика- Зависимость напряжения на вторичной обмотке трансформатора от тока нагрузки
Вопрос
Электроника - наука о взаимодействии электронов с электромагнитными полями и о методах создания электронных приборов и устройств, в которых это взаимодействие используется для преобразования электромагнитной энергии, в основном для передачи, обработки и хранения информации.
Наиболее характерные виды таких преобразований — генерирование, усиление и приём электромагнитных колебаний с частотой до 1012 гц, а также инфракрасного, видимого, ультрафиолетового и рентгеновского излучений (1012—1020 гц).
Виды электроники:
· компьютеры, мониторы (ЭЛТ и ЖК), ноутбуки, системные блоки, мыши, клавиатуры
- оргтехника и расходные материалы: принтеры, сканеры, картриджи
- бытовая техника: телевизоры, холодильники, стиральные машины, микроволновки, тостеры
- устройства связи: мобильные телефоны, радиостанции
· банкоматы и кассовые аппараты