Передаточные функции апериодических звеньев 2-го порядка разбиваем на два последовательных инерционных звена 1-го порядка (W11,W22, W12, W21).
Построимструктурнуюсхему
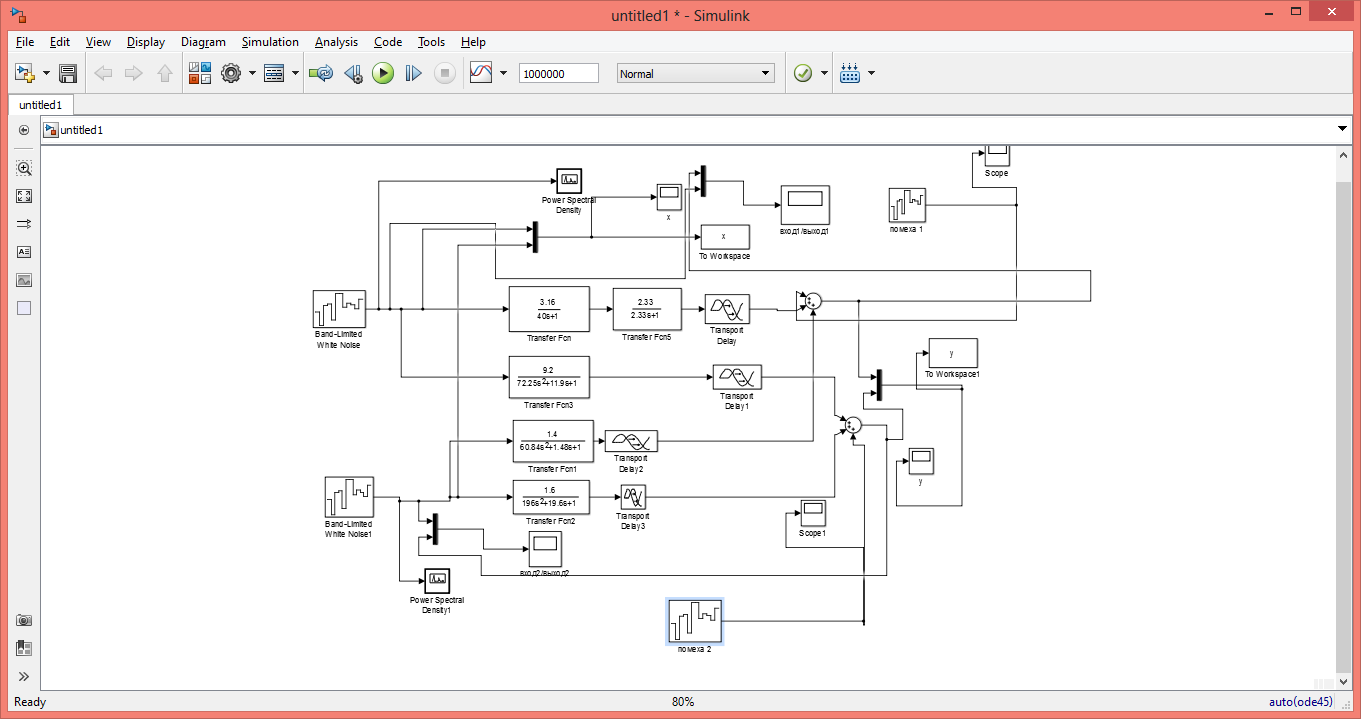
Рисунок 1 – Схема 1
Определим параметры настроек блоков входного сигнала. Для этого рассчитаем время дискретизации в генераторах белого шума на входе системы по формулам:
 ; округлим до 30 с.
; округлим до 30 с.
 ; округлим до 40с.
; округлим до 40с.
Интервал дискретизации для WhiteNoise 1, WhiteNoise 2:
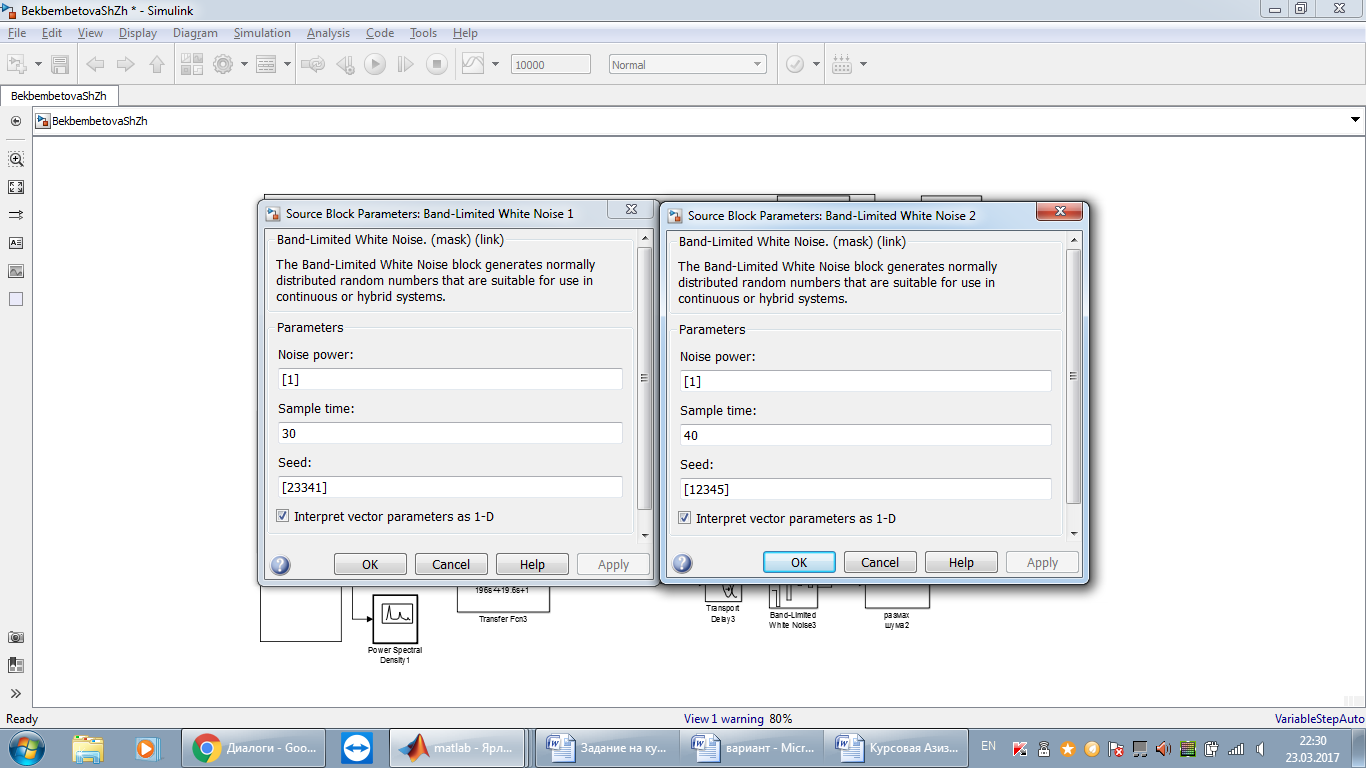
Рисунок 2 – Окно настроек генераторов белого шума
Время моделирования системы (при динамическом ряде – 1000) возьмем таким, что бы все переходные процессы вошли в установившийся режим. Для этого построим переходные характеристики всех передаточных функций и определим максимальное время установления процесса.

Рисунок 3 – Схема передаточных функции апериодических звеньев
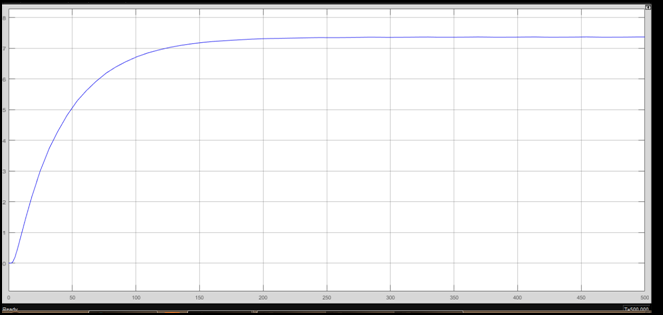
Рисунок 4 –Переходная характеристика W11

Рисунок 5 –Переходная характеристика W12

Рисунок 6 –Переходная характеристика W21

Рисунок 7 – Переходная характеристика W22
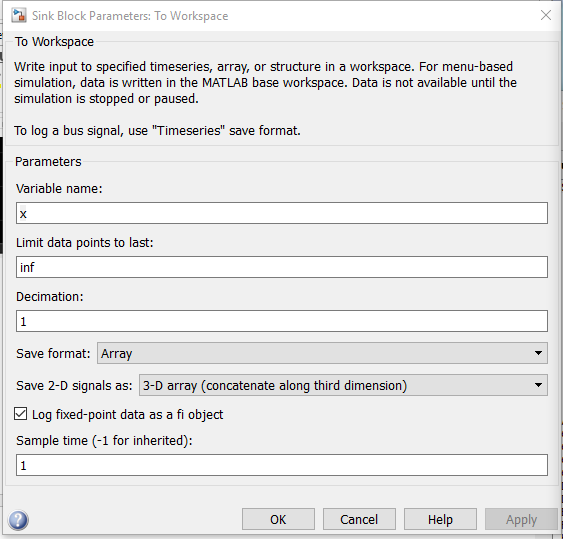
Рисунок 8 – Настройка блока ToWorkspace (х)

Рисунок 9 – Настройка блока ToWorkspace (у)
Далее надо настроить генератор белого шума на выходе системыю Выберем дискретизации генератора белого шума такое же, как и время дискретизации моделирования системы.

Рисунок 10 – Настройка времени дискретизации моделирования системы
Время дискретизации моделирования системы задали 0.1, значит и время дискретизации генератора белого шума выберем таким же.
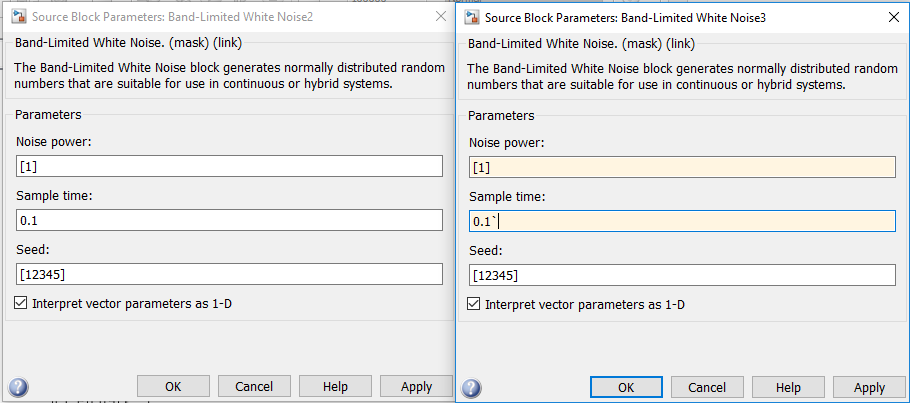
Рисунок 11 – Настройка времени дискретизации блоков генератора белого на выходе
Теперь определим величину размаха амплитуды выходного сигнала без помехи.
Рисунок 12 – График вход/выход первого канала
|
|
Рисунок 13 – График вход/выход второго канала
Для первого канала размах примерно равен 11.6 и второго канала размах примерно равен 8.
Подберем мощность генератора белого шума на выходах так, чтобы их размах равнялся половине размаха на соответствующих выходах.
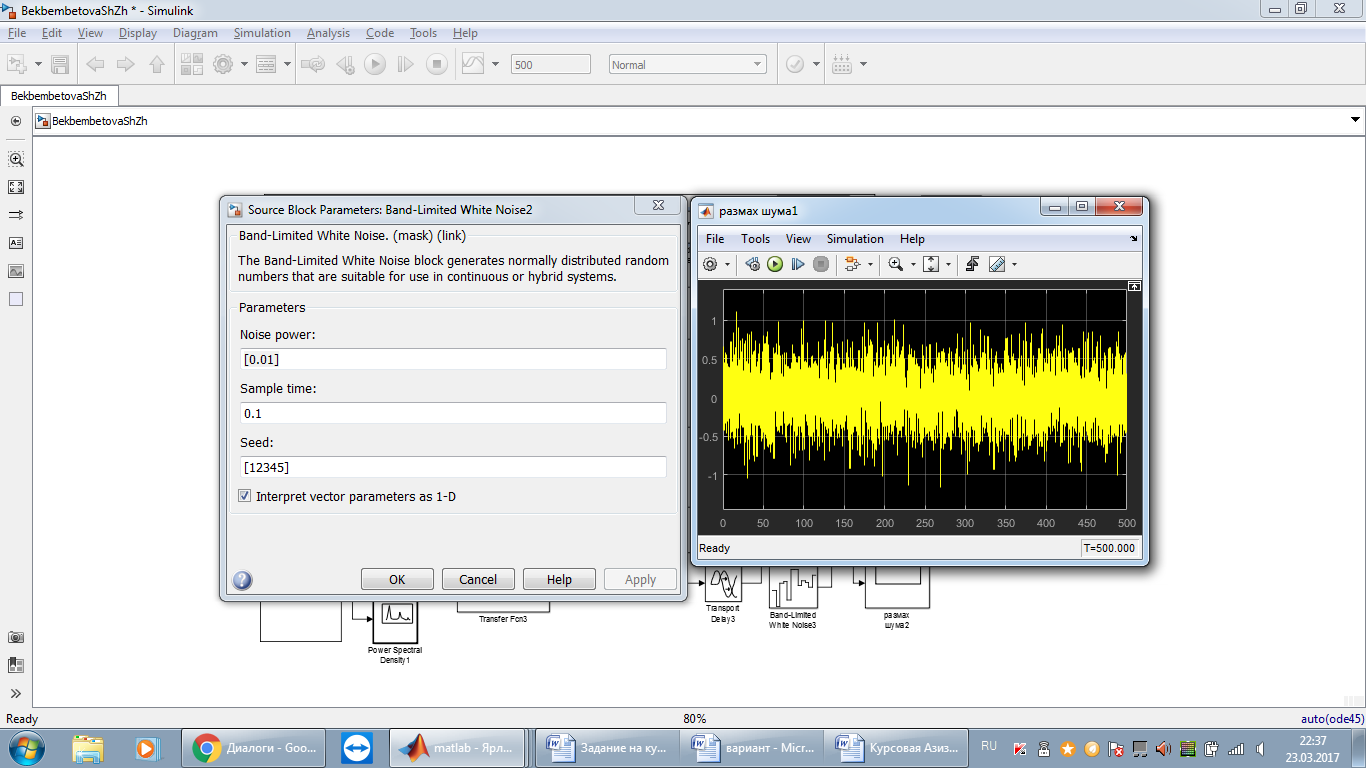
Рисунок 14 – Окно настройки и график размаха первого генератора белого шума (5.8)
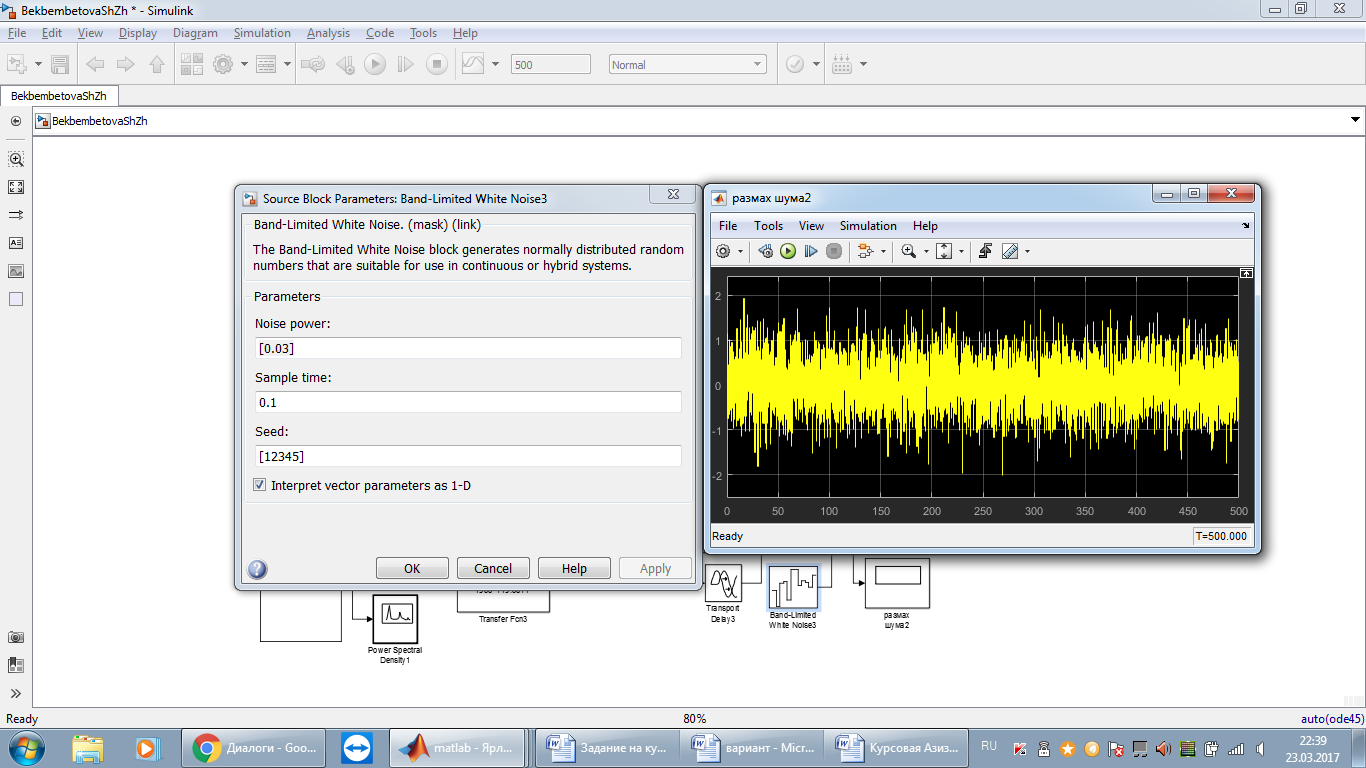
Рисунок 15 – Окно настройки и график размаха первого генератора белого шума (4)
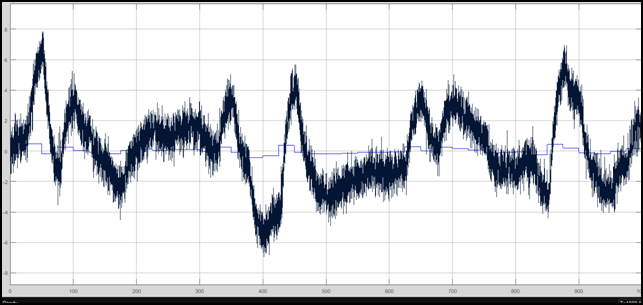
Рисунок 16 – График вход/выход первого канала с 50%-ной помехой
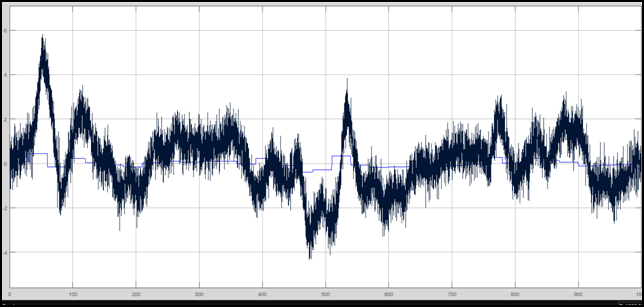
Рисунок 17 – График вход/выход второго канала с 50%-ной помехой
Полученная мощность соответствует 50% помехе(500 и 250), для 5% помехи возьмем мощности уменьшим на два порядка(5 и 2.5), а для 0,5% помехи на четыре порядка(0.05 и 0.025).
Подберем оптимальные настройки блока спектра сигнала и построим графики исследовательского сигнала:
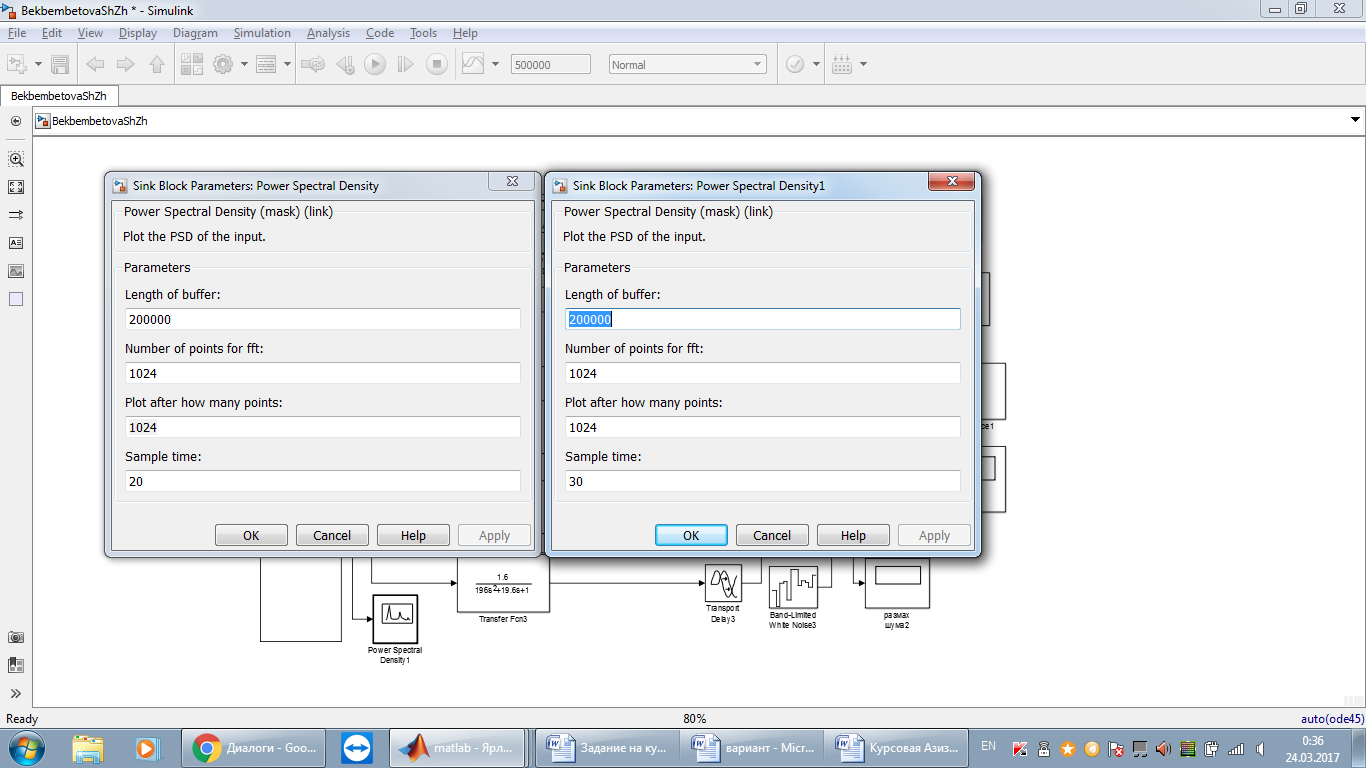
Рисунок 16 – Окно настройки блоков спектра сигнала
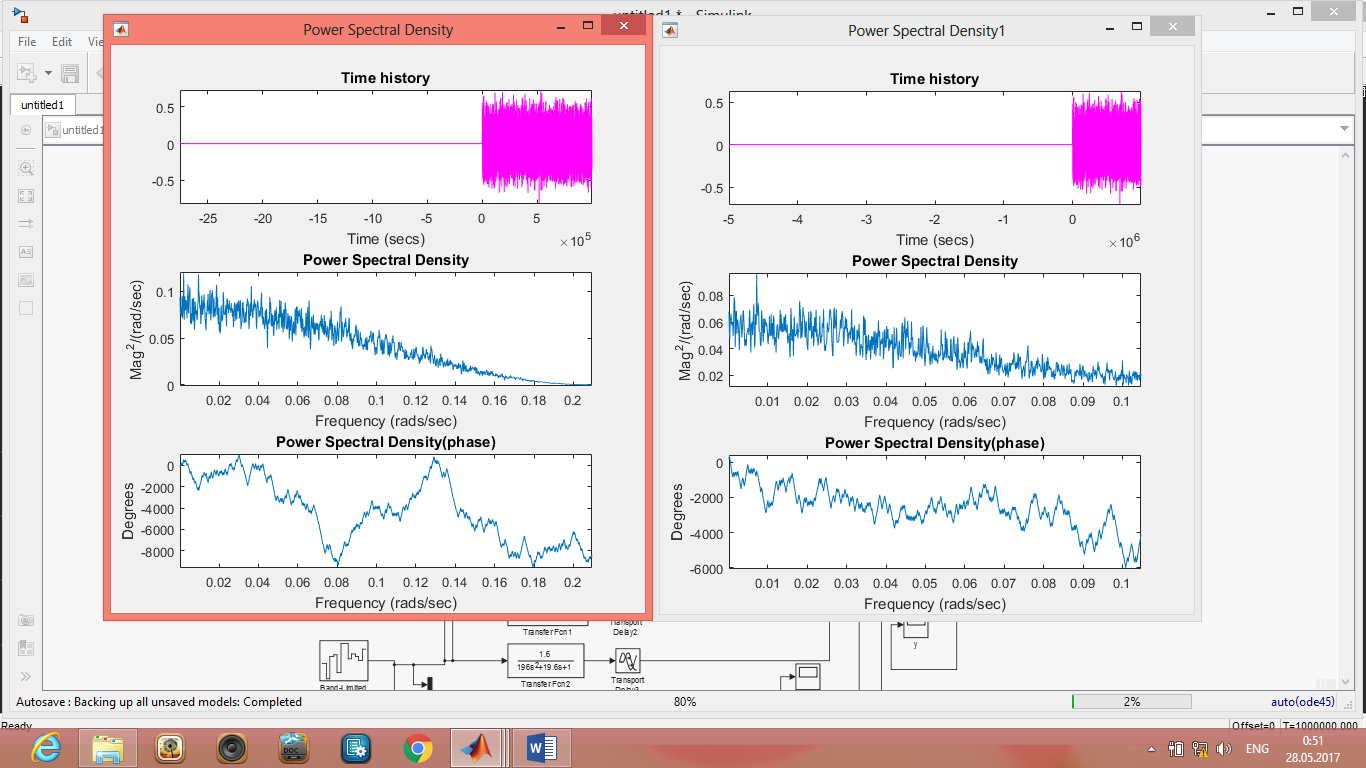
Рисунок 17 – Спектры входных сигналов

Рисунок 18 – График вход/выходпервого канала без помех (1000c)
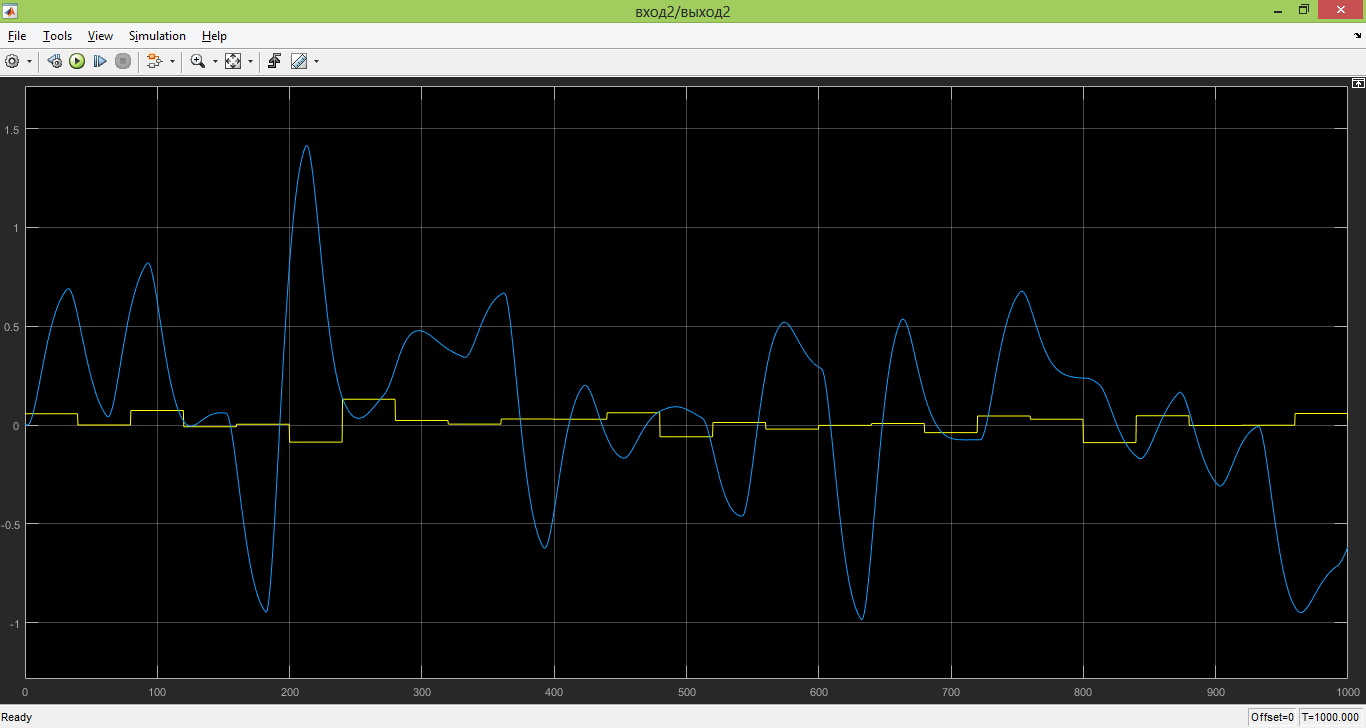
Рисунок 19– График вход/выход второго канала без помех (1000 с)
Для первого выхода размах примерно равен 0,9 и второго выхода размах примерно равен 2,4. Мощность шума при котором размах помехи будет занимать 50% от размаха амплитуды сигнала без помехи то есть в нашем случае 0,45 и 1,2 соответсвенно.

Рисунок 20 – мощность белого шума для 50%
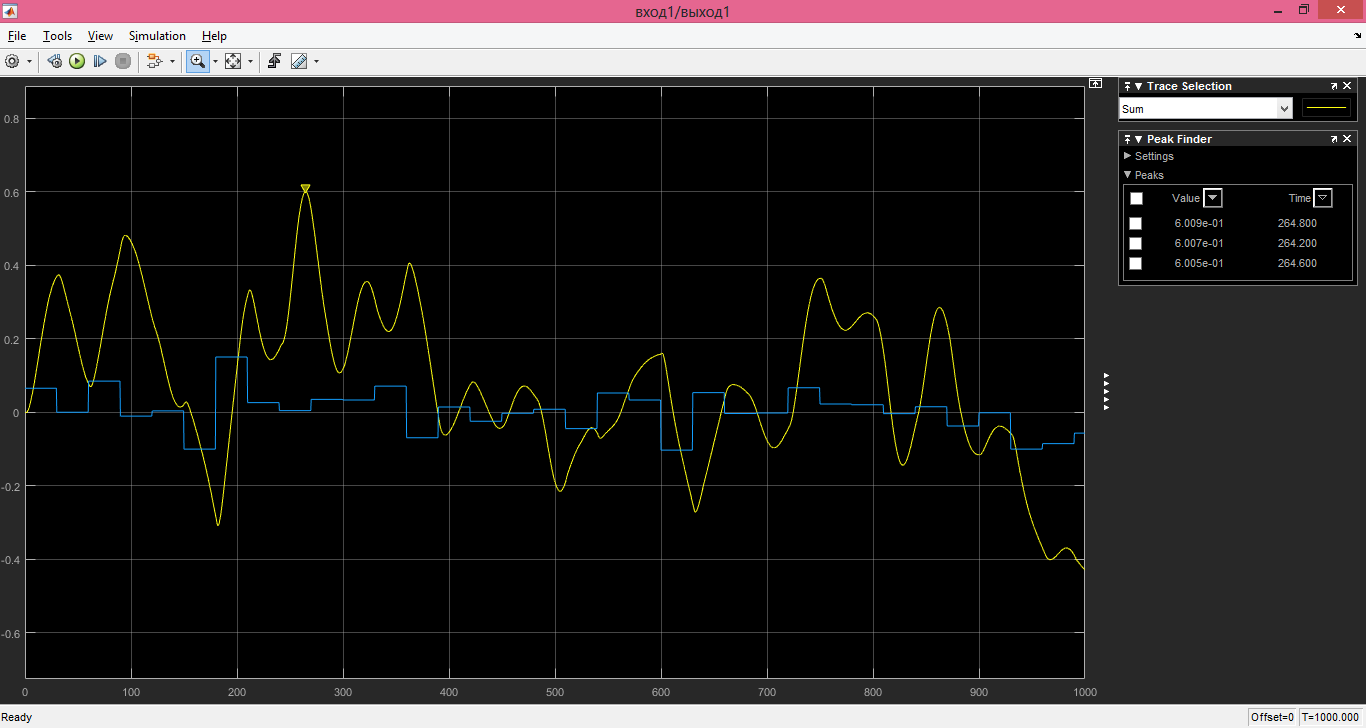
Рисунок 20 – График вход/выход первогоканала с помехой(0.5%)
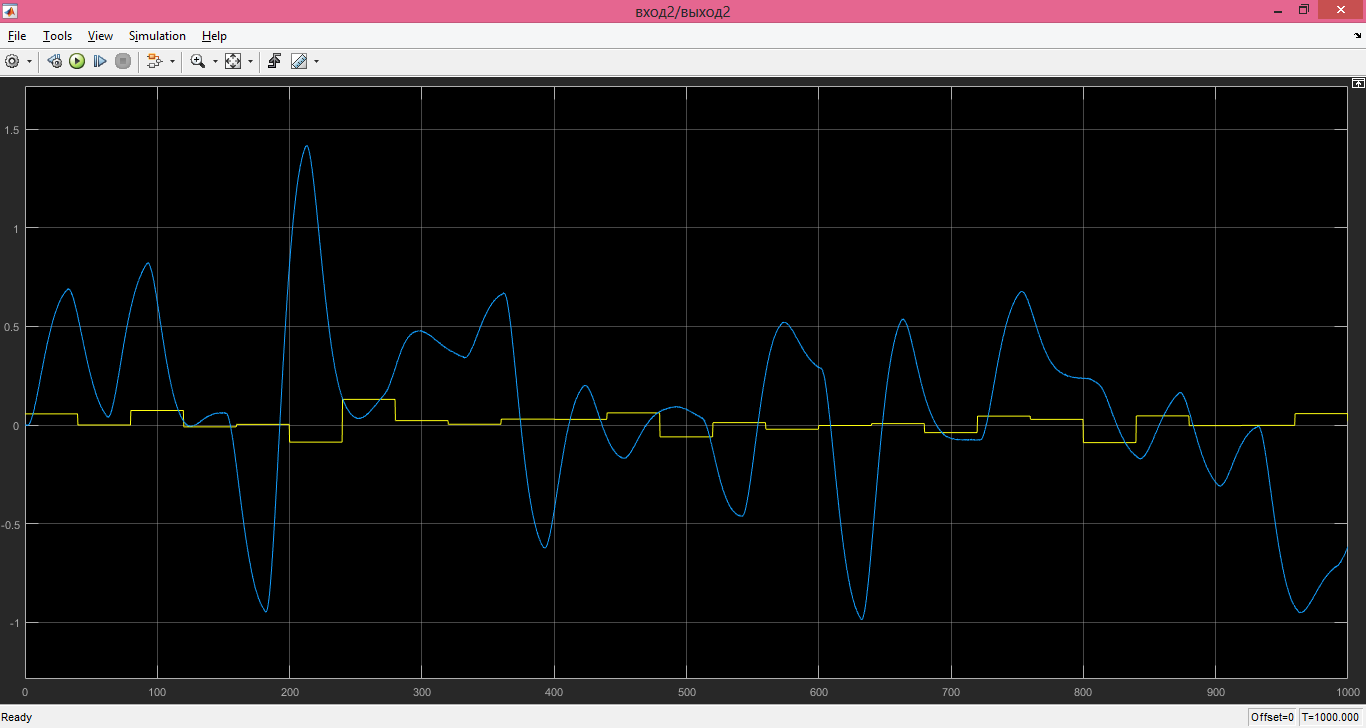
Рисунок 21 – График вход/выход второго канала с помехой(0.5%)
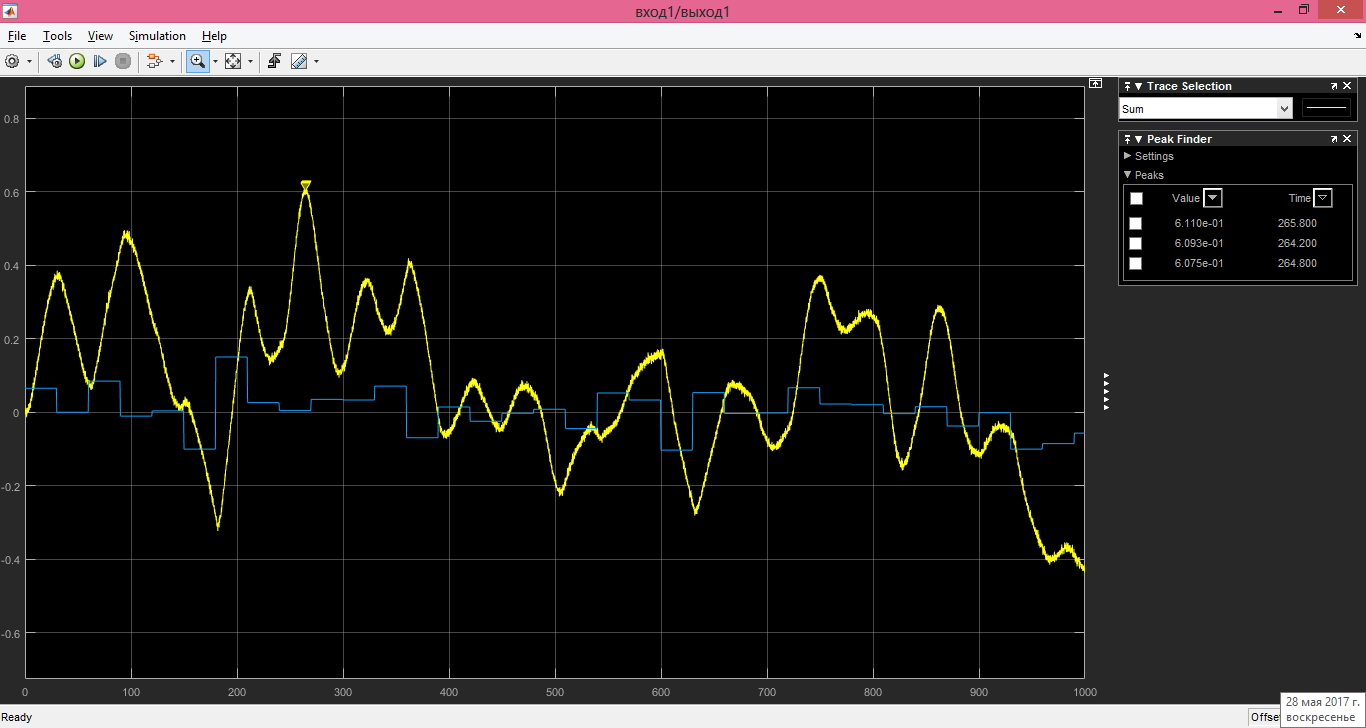
Рисунок 22 – График вход/выход первого канала с помехой (5%)
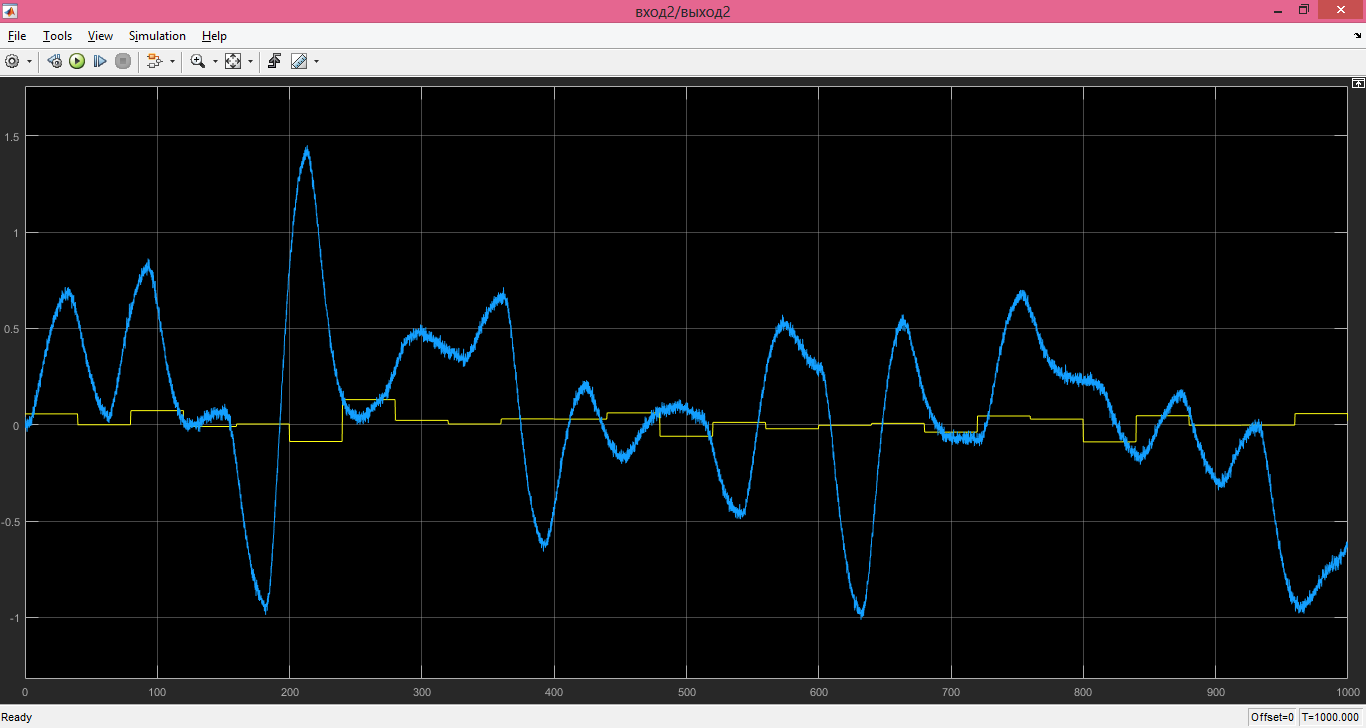
Рисунок 23 – График вход/выход второго канала с помехой (5%)
|
|
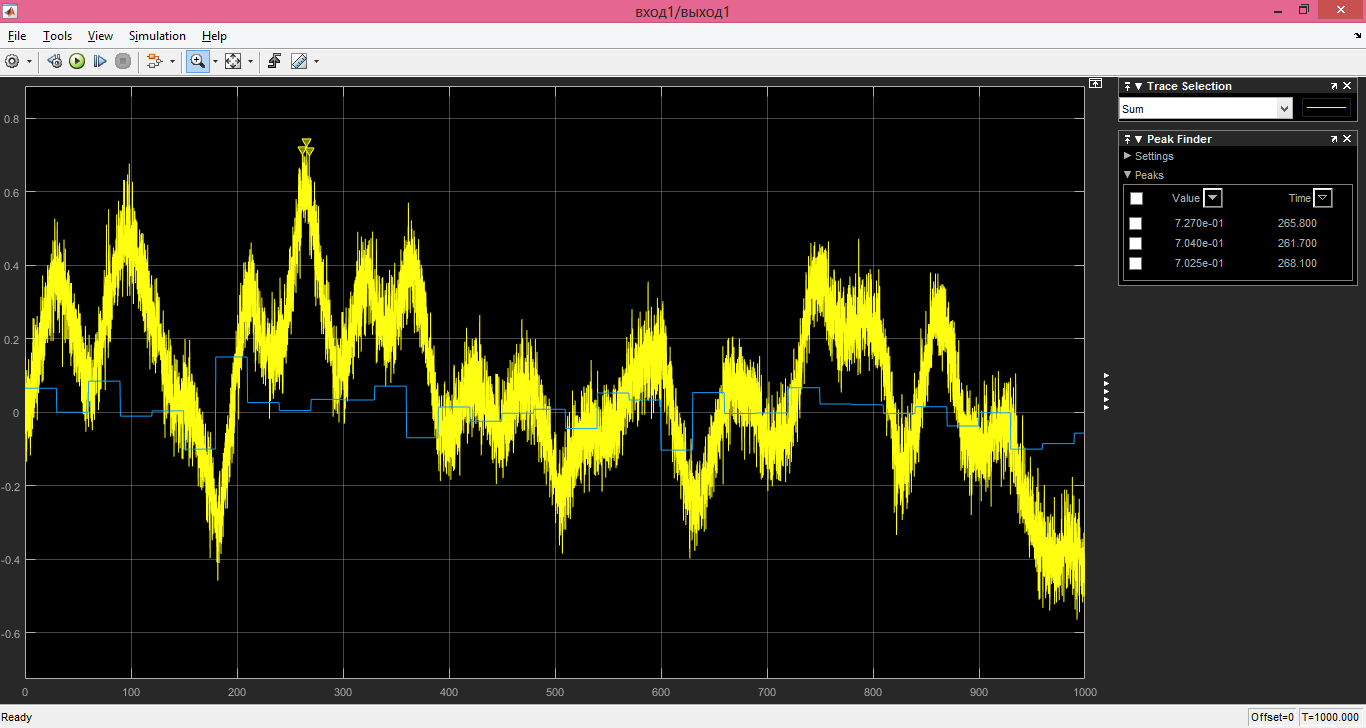
Рисунок 24 – График вход/выход первого канала с помехой(50%)

Рисунок 25 – График вход/выход второго канала с помехой (50%)

Рисунок 26 – График выходного сигнала без помех
Рисунок 27 – График выходного сигнала с помехой (0.5%)

Рисунок 28 – График выходного сигнала с помехой (5%)

Рисунок 29 – График выходного сигнала с помехой (50%)
Импортируем следующие динамические ряды в SystemIdentification, где x0 иy0, x4иy4, x8иy8 – без помех; x1иy1,x5иy5,x9иy9 – 0.5% помеха; x2иy2, x6иy6,x10иy10 – 5% помеха; x3иy3,x7иy7,x11иy11 – 50% помеха.
Рисунок 30 – Динамические ряды
Вывод к первой части курсовой работы:
В первой части курсовой работы мы научились формировать модель для имитации динамических рядов многомерного объекта, обеспечивающих максимальную точность идентификации в условиях действия случайных помех. Сформировали 12 динамических рядов размерностью 500, 5000, 50000 (с разрешения преподавателя можно уменьшить размерность на порядок) без случайного шума и с шумом величиной 0.5, 5, 50%. Полученные динамические ряды идентичны. Шум на входное воздействие не влияет.
Задание 2: Исследование точности идентификации динамического ряда без помех с помощью ProcessModels и функций N4SID и PEM.
Импортируем динамический ряд размерностью 100000 в SystemIdentification
Проведем идентификцию параметров модели известной структуры через ProcessModels.
a) b)
Рисунок 18 – точность идентификации в processmodels
a) y1 b) y2
Далее проведем предварительную идентификацию всего динамического ряда с помощью функции N4SID и найдем наиболее приемлемый порядок модели.
|
|

Рисунок 19 – Выбор порядка модели
Наиболее подходящим порядком модели в данном случае является 20-й порядок
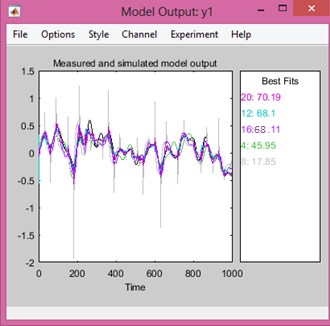
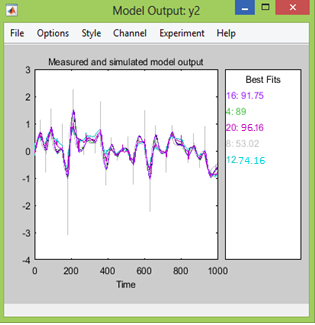
Рисунок 20 – Точность идентификации функции при 4,8,12,16,20 порядке
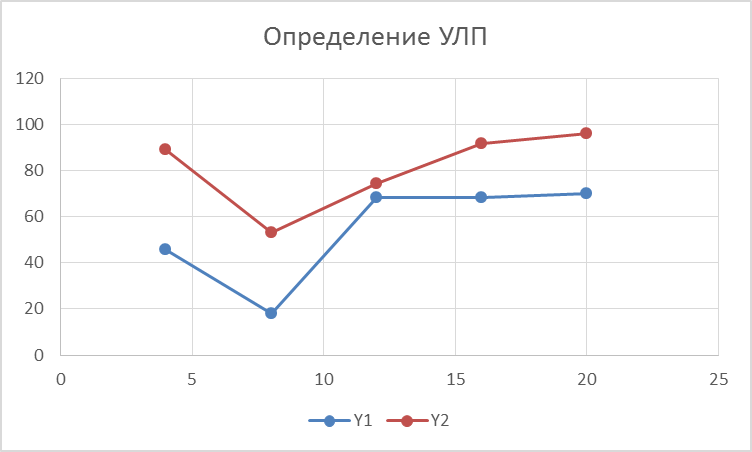
Рисунок 21 – точности идентификации по обоим каналам
Идентификация параметров модели неизвестной структуры функциями и N4SID в пространстве состояний: выбираем структуру, для этого на примере базового динамического ряда исследуем точность идентификации для порядков модели, уточнение точности вблизи наилучшего порядка 6,7,8,9,10 - для подтверждения уточненного лучшего порядка

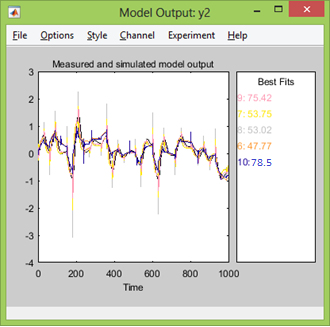
Рисунок 22 – уточнение УЛП

Рисунок 23 – график точностей для 6,7,8,9,10 порядков по обоим каналам
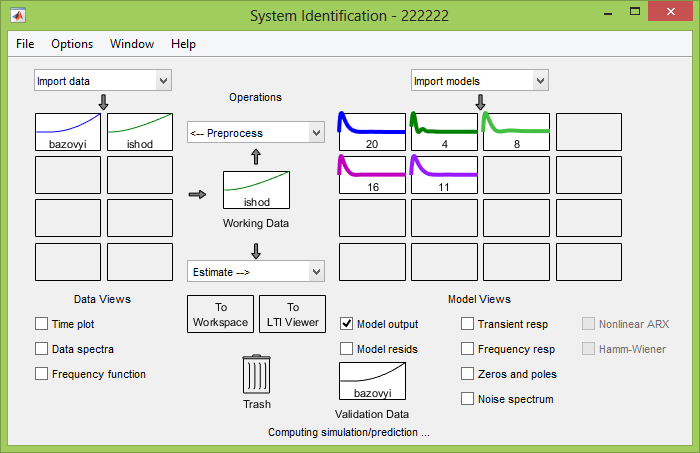
Рисунок 21 – Окно System Identification

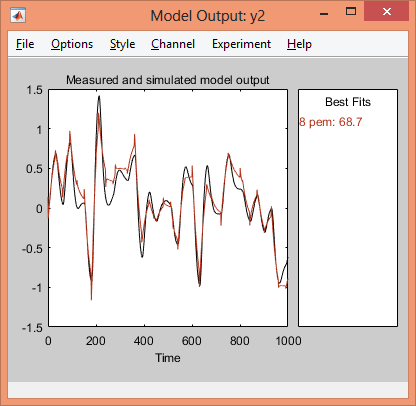
Рисунок 23 – Идентификация для УЛП с помощью функции PEM
Таблица 1 -Результаты идентификации
| № | Параметры иссл-го сигнала | Шаг мод-я системы, с. | Шаг дин. ряда, с | Разм-сть дин. ряда | Порядок модели | Метод (PrMd, N4SID, PEM) | Точность ид-ииBestFit, % Y1 | Точность ид-ииBestFit, % Y2 |
| Band limited white noise 20/40 | 0,01 | 0,1 | N4SID | 45.95 | ||||
| 20/40 | 0,01 | 0,1 | N4SID | 17.85 | 53.02 | |||
| 20/40 | 0,01 | 0,1 | N4SID | 68.1 | 74.57 | |||
| 20/40 | 0,01 | 0,1 | N4SID | 68.11 | 91.75 | |||
| 20/40 | 0,01 | 0,1 | N4SID | 57.65 | 47.77 | |||
| 20/40 | 0,01 | 0,1 | N4SID | 29.89 | 63.75 | |||
| 20/40 | 0,01 | 0,1 | N4SID | 33.75 | 75.45 | |||
| 20/40 | 0,01 | 0,1 | N4SID | 69.36 | 78.5 | |||
| 30/40 | 0.01 | 0.1 | N4SID | 70.19 | 96.16 | |||
| 30/40 | 0.01 | 0.1 | pem | 54.38 | 68.7 |
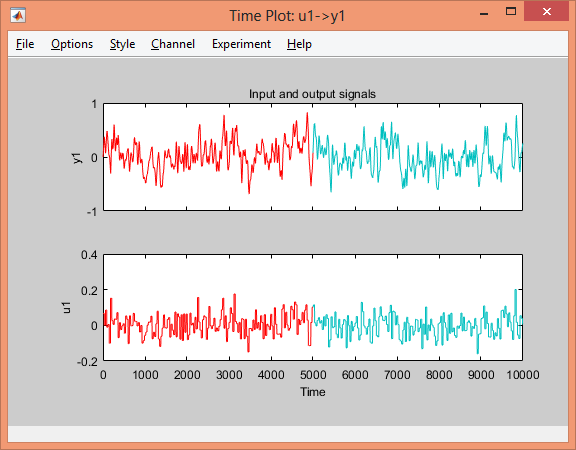
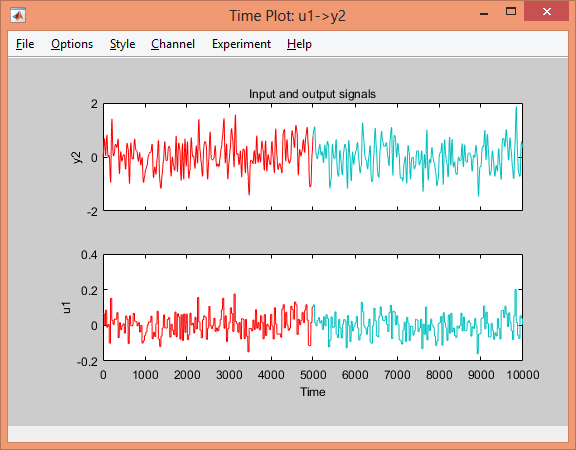

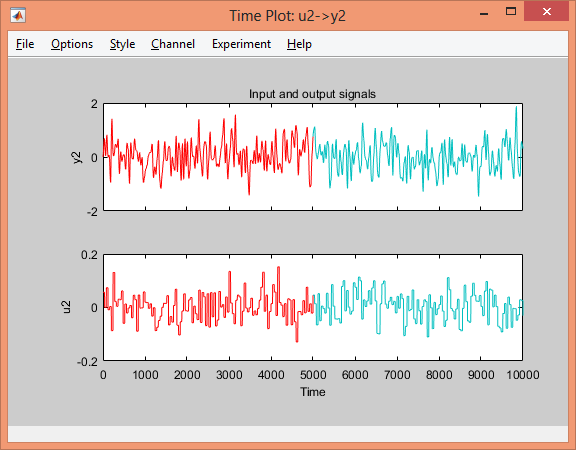
Рисунок 25 – timeplot после разделения динамического ряда
Исследование влияние шага дискретизации исследовательских сигналов белого шума (200с., 20с, 2с, 0.2с., 0.02с., 0.002с. для Tгбш1, 400, 40, 4, 0.4, 0.04, 0.004 для Tгбш2 при этом соответственно меняем шаг моделирования (0.1,0.01,0.001) чтобы сохранить размерность динамических рядов 100000.) на точность идентификации с помощью функции PEM и ProcessModels.


Рисунок 27 – bestfit для PEM при изменении sampletime генератора белого шума
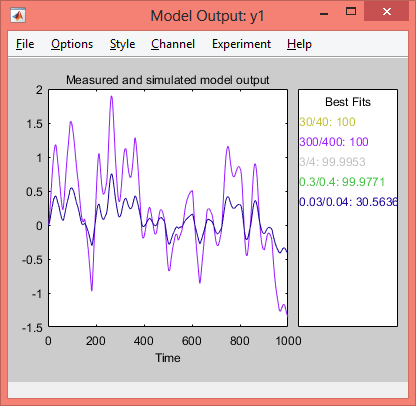
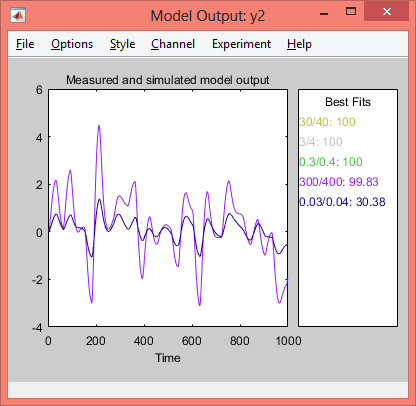
Рисунок 28 – bestfit для processmodelsпри изменении sampletime генератора белого шума
Таблица 2 -Результаты идентификации
| № | Параметры иссл-го сигнала | Шаг мод-я системы, с. | Шаг дин. ряда, с | Разм-сть дин. ряда | Порядок модели | Метод (PrMd, N4SID, PEM) | Точность ид-ииBestFit, % Y1 | Точность ид-ииBestFit, % Y2 |
| 200/400 | 0,1 | 0,1 | PEM | 46.76 | 69.42 | |||
| 20/40 | 0,1 | 0,1 | PEM | 31.04 | 57.38 | |||
| 2/4 | 0,1 | 0,1 | PEM | 18.59 | 59.1 | |||
| 0.2/0.4 | 0.01 | 0.1 | PEM | 3.701 | 6.259 | |||
| 0.02/0.04 | 0.01 | 0.1 | PEM | 0.04084 | 6.504 | |||
| 200/400 | 0.1 | 0.1 | Pr mod | 99.83 | ||||
| 20/40 | 0.1 | 0.1 | Pr mod | |||||
| 2/4 | 0.1 | 0.1 | Pr mod | 99.9953 | ||||
| 0.2/0.4 | 0.01 | 0.1 | Pr mod | 99.9771 | ||||
| 0.02/0.04 | 0.01 | 0.1 | Pr mod | 30.56 | 30.38 |
При фиксированном размере динамических рядов 100000 экземпляров исследуем влияние способа формирования динамического ряда на точность идентификации с помощью функции PEM([10с.; 0.0001с.], [100с.; 0.001с.], [1000с.; 0.01с.], [10000с.; 0.1с.])
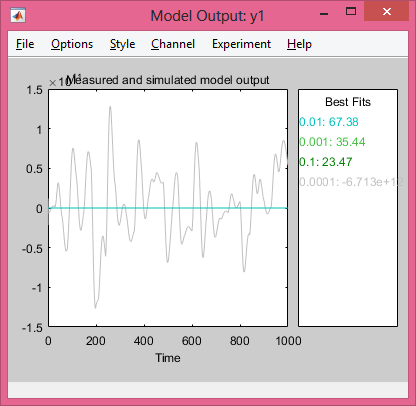
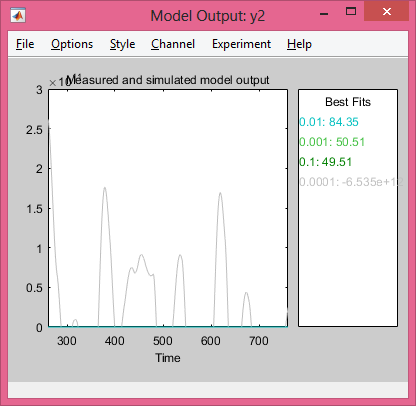


Рисунок 29– изменение bestfitPEM и processmodels при изменении шага моделирования системы и времени моделирования
Таблица 3 -Результаты идентификации
| № | Параметры иссл-го сигнала | Шаг мод-я системы, с. | Время моделирования | Разм-сть дин. ряда | Порядок модели | Метод (PrMd, N4SID, PEM) | Точность ид-ииBestFit, % Y1 | Точность ид-ииBestFit, % Y2 |
| 20/40 | 0,1 | PEM | 23.47 | 49.51 | ||||
| 20/40 | 0,01 | PEM | 67.38 | 84.35 | ||||
| 20/40 | 0,001 | PEM | 35.44 | 50.51 | ||||
| 20/40 | 0,0001 | PEM | -6.71e+12 | -6.53e+12 | ||||
| 20/40 | 0,1 | Pr mod | ||||||
| 20/40 | 0,01 | Pr mod | 92.93 | 83.74 | ||||
| 20/40 | 0,001 | Pr mod | 91.34 | 79.26 | ||||
| 20/40 | 0,0001 | Pr mod | 58.79 | 76.82 |
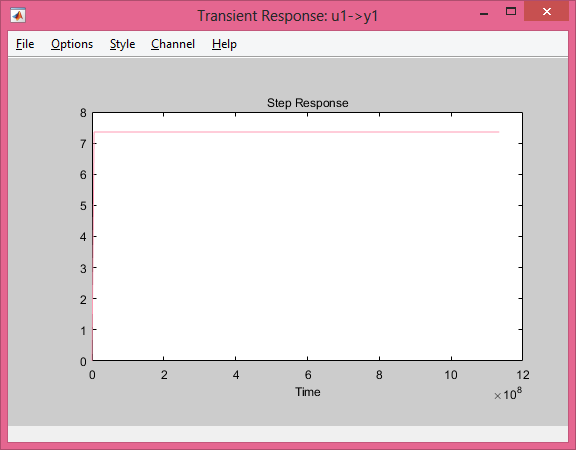
Рисунок 30 – Переходная характеристика УЛП по 1 входу и 1 выходу
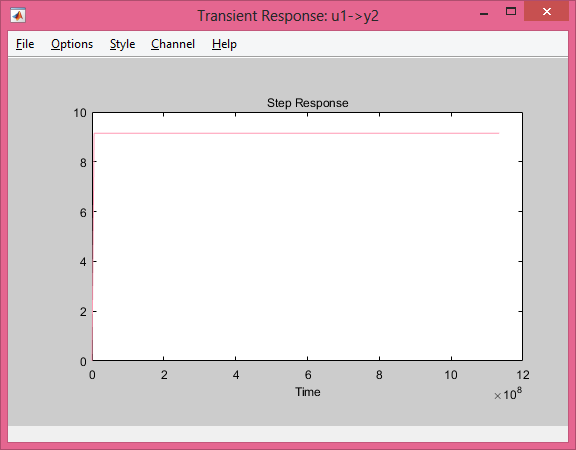
Рисунок 31 – Переходная характеристика УЛП по 1 входу и 2 выходу

Рисунок 32 – Переходная характеристика УЛП по 2 входу и 1 выходу
Рисунок 33 – Переходная характеристика УЛП по 2 входу и 2 выходу
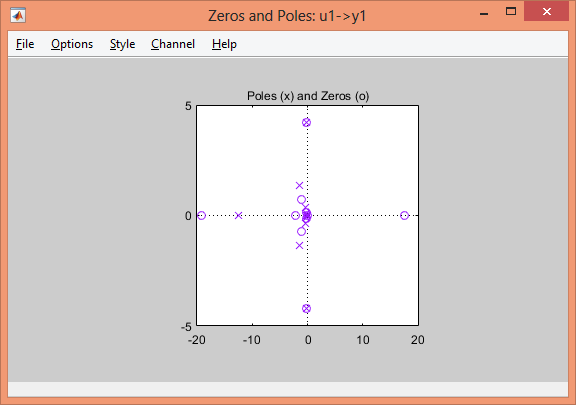
Рисунок 34 – Нули и полюса по 1 входу и 1 выходу
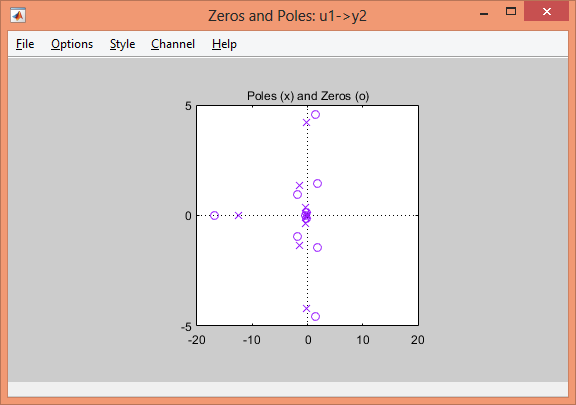
Рисунок 35 – Нули и полюса по 1 входу и 1 выходу

Рисунок 36 – Нули и полюса по 2 входу и 1 выходу
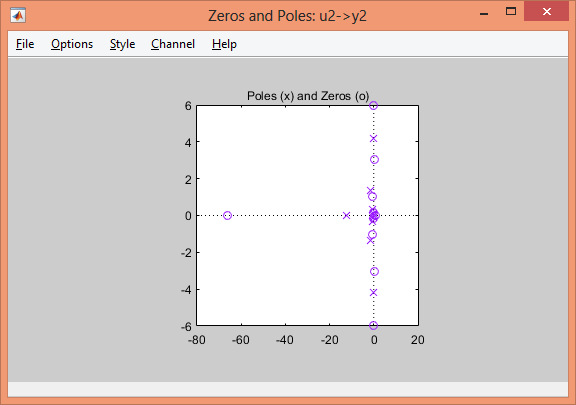
Рисунок 36 – Нули и полюса по 2 входу и 2 выходу
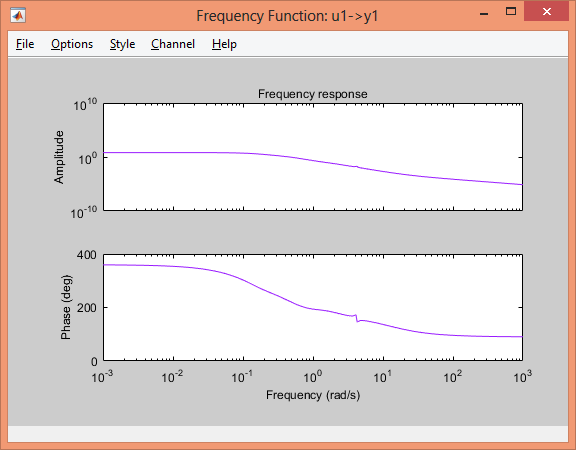
Рисунок 37 – Частотные характеристики по 1 входу и 1 выходу
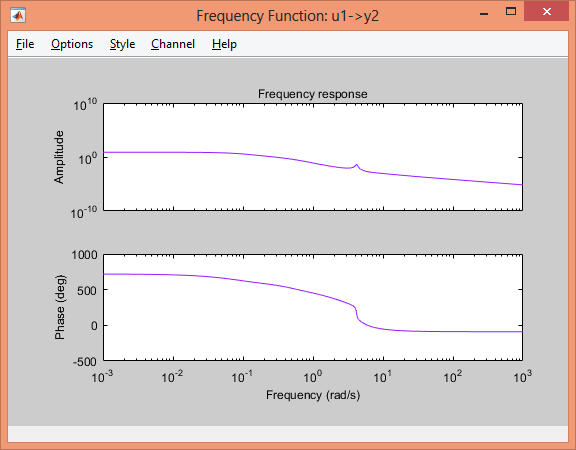
Рисунок 38 – Частотные характеристики по 1 входу и 2 выходу
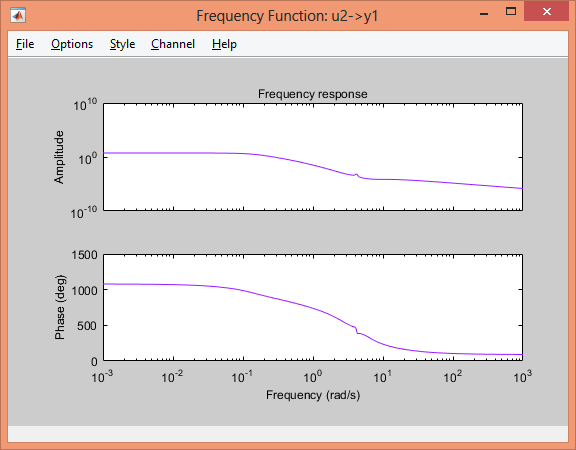
Рисунок 39 – Частотные характеристики по 2 входу и 1 выходу
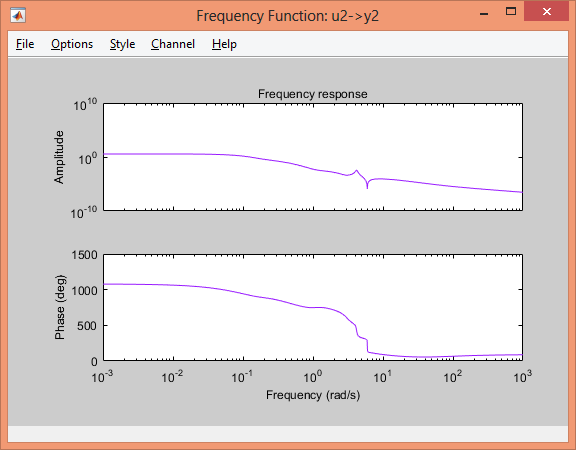
Рисунок 40 – Частотные характеристики по 2 входу и 2 выход
Вывод для 2 задания курсовой: в этой части курсовой работы мы проверяли точность идентификации модели по 3-м методам N4SID, PEM, ProcessModels. Как показывает эксперимент данные вычисленные методом ProcessModelsточность высокая.
Задание 3:
Цель: исследовать влияние размерности динамических рядов на точность идентификации в условиях действия случайных помех различной интенсивности. Научиться добиваться в данных условиях максимальной точности идентификации. Прийти к выводу и подтвердить результатами исследования, что методом улучшения точности идентификации в условиях действия помех является увеличение размерности динамического ряда. Сделать вывод о точности идентификации в условиях действия слабых и сильных случайных помех.
Для трех рекомендуемых значений размерности динамических рядов (1000, 10000, 100000, шаг ряда 0.01с.) и интенсивности помех (0.5, 5, 50%) проведем идентификацию методами PEM и ProcessModels с максимально возможной точностью при выбранном порядке модели УЛП.
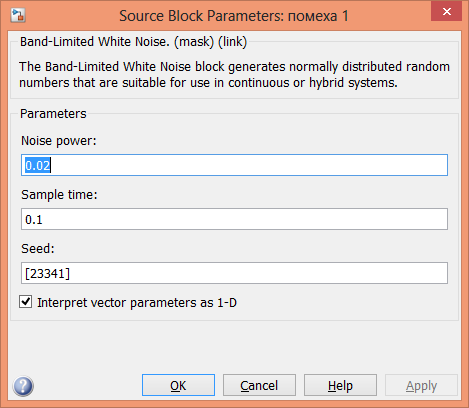
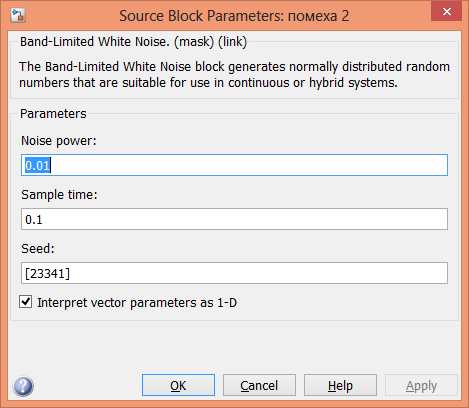
Рисунок 30 – настройки белого шума для 50%
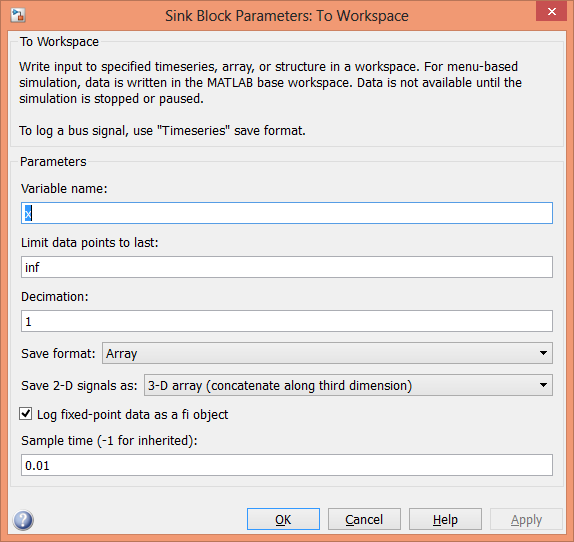

Рисунок 31 – Настройки блока “toworkspace”
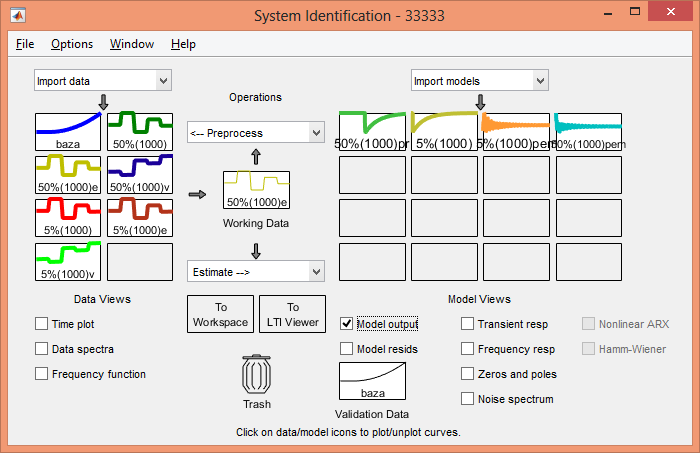
Рисунок 32 – окно ident
На рисунке 32 показано, что мы идентификацию модели проводили по первой половине динамического ряда, а вычисление метрик BestFit точности идентифицированной модели "идеальной" ‑ по базовому динамическому ряду (шаг 0.01с., длительность 1000с.) в области ValidationData.

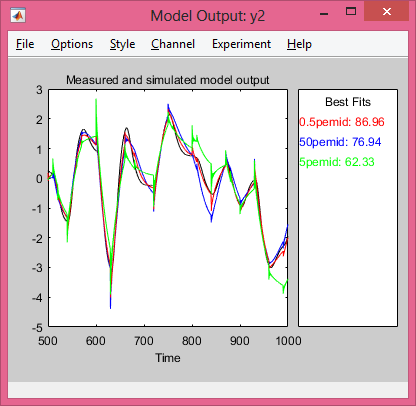
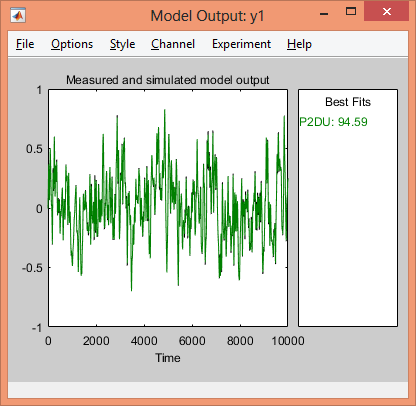
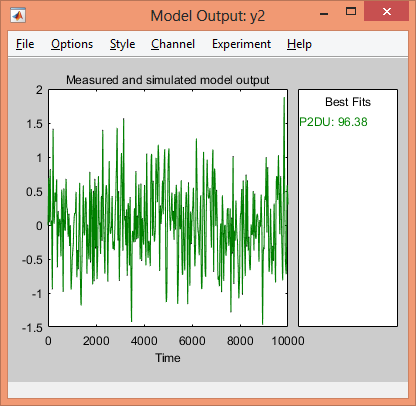
Рисунок 33 – bestfit для 0.5%, 5%, 50% шума при динамическом ряде 100000 в РЕМ


Рисунок 34 – bestfit для 0.5%, 5%, 50% шума при динамическом ряде 100000 в processmodels
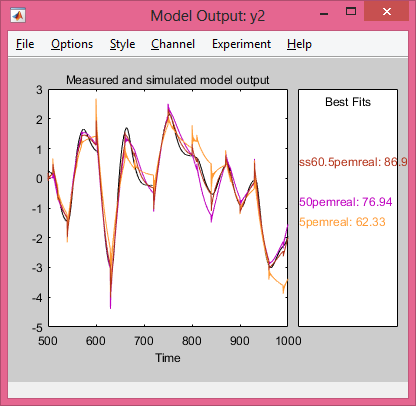

Рисунок 34 – bestfit для 0.5%, 5%, 50% шума при динамическом ряде 100000 в PEMпри 2 половине динамического ряда
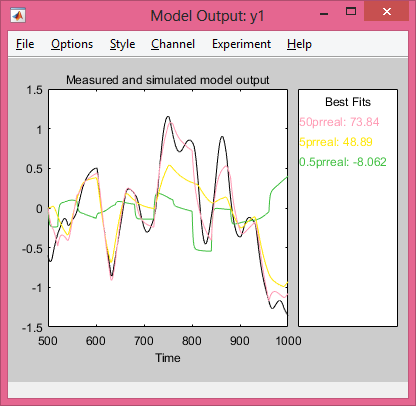
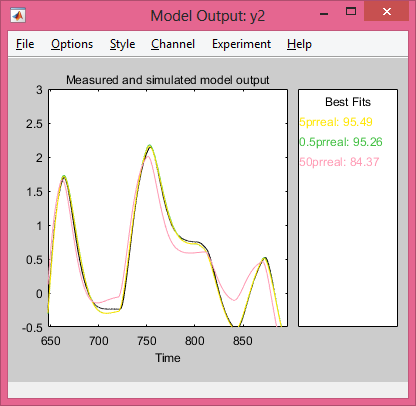
Рисунок 35 – bestfit для 0.5%, 5%, 50% шума при динамическом ряде 100000 в Processmodels при 2 половине динамического ряда

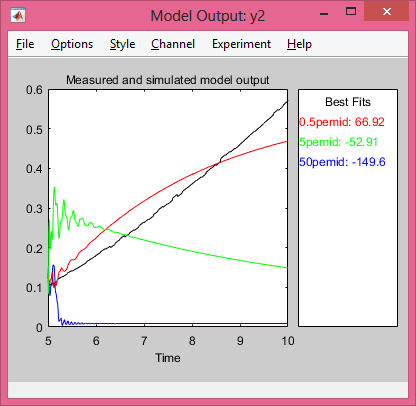
Рисунок 36 – bestfit для 0.5%, 5%, 50% шума при динамическом ряде 1000 в PEM при validationdatabaza динамического ряда


Рисунок 37 – bestfit для 0.5%, 5%, 50% шума при динамическом ряде 1000 в Processmodelsvalidationdatabaza динамического ряда

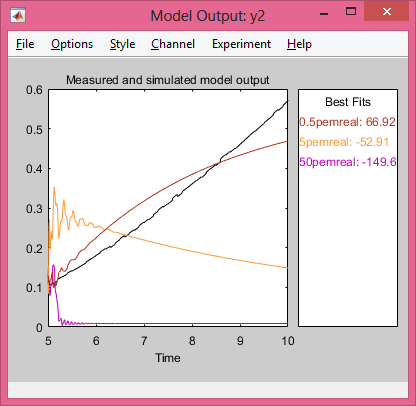
Рисунок 38 – bestfit для 0.5%, 5%, 50% шума при динамическом ряде 1000 в PEM при validationdata 2 половина динамического ряда
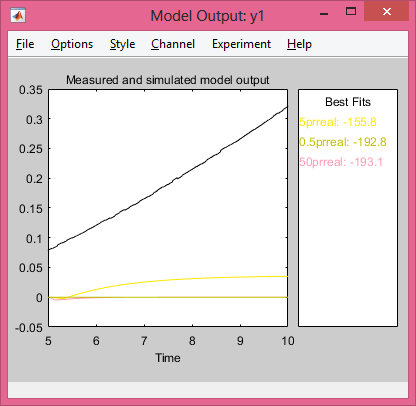
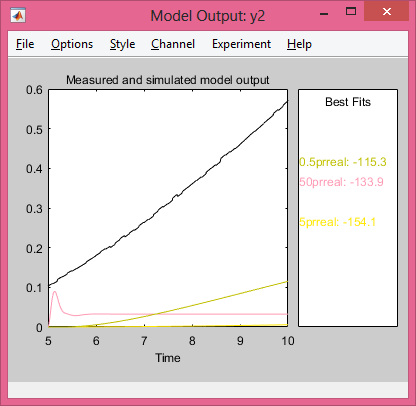
Рисунок 38 – bestfit для 0.5%, 5%, 50% шума при динамическом ряде 1000 в при Processmodelsvalidationdata 2 половина динамического ряда

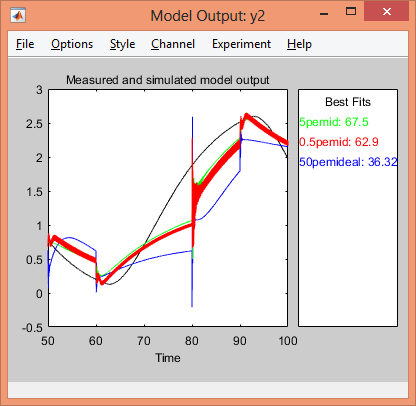
Рисунок 39 – bestfit для 0.5%, 5%, 50% шума при динамическом ряде 10000 в PEM при validationdatabaza динамического ряда
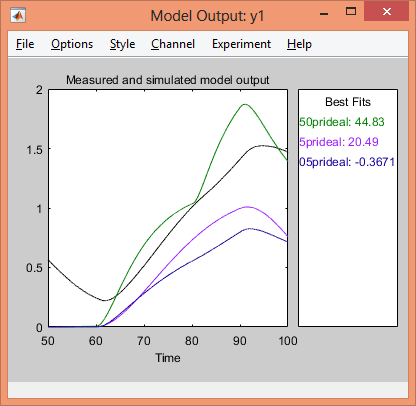
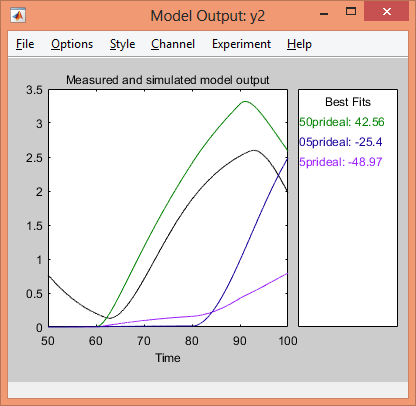
Рисунок 40 – bestfit для 0.5%, 5%, 50% шума при динамическом ряде 10000 в Processmodelsvalidationdatabaza динамического ряда
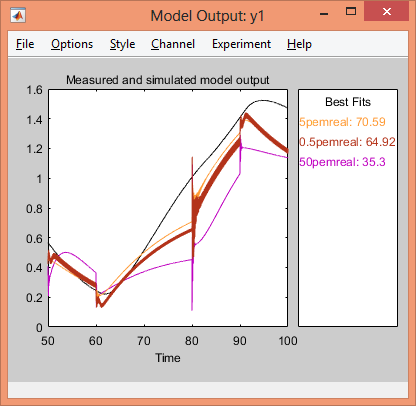
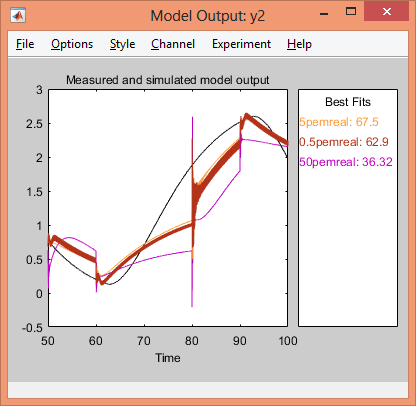
Рисунок 41 – bestfit для 0.5%, 5%, 50% шума при динамическом ряде 10000 в PEM при validationdata 2 половина динамического ряда


Рисунок 42 – bestfit для 0.5%, 5%, 50% шума при динамическом ряде 10000 в при Processmodelsvalidationdata 2 половина динамического ряда
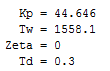
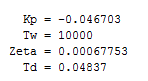
Рисунок 43 – параметры передаточных функции W11,W21,W12,W22 при 1000 экземпляров 0,5% validationdata базовый


Рисунок 44 – параметры передаточных функции W11,W21,W12,W22 при 1000 экземпляров 5% validationdata базовый


Рисунок 45 – параметры передаточных функции W11,W21,W12,W22 при 1000 экземпляров 50% validationdata базовый

Рисунок 46 – параметры передаточных функции W11,W21,W12,W22 при 1000 экземпляров 0,5% validationdata 2-я половина

Рисунок 47 – параметры передаточных функции W11,W21,W12,W22 при 1000 экземпляров 5% validationdata 2-я половина

Рисунок 48 – параметры передаточных функции W11,W21,W12,W22 при 1000 экземпляров 50% validationdata 2-я половина
Рисунок 49 – параметры передаточных функции W11,W21,W12,W22 при 10000 экземпляров 0,5% validationdata базовый
Рисунок 50 – параметры передаточных функции W11,W21,W12,W22 при 10000 экземпляров 5% validationdata базовый
Рисунок 51 – параметры передаточных функции W11,W21,W12,W22 при 10000 экземпляров 50% validationdata базовый

Рисунок 52 – параметры передаточных функции W11,W21,W12,W22 при 10000 экземпляров 0,5% validationdata 2-я половина


Рисунок 53 – параметры передаточных функции W11,W21,W12,W22 при 10000 экземпляров 5% validationdata 2-я половина


Рисунок 54 – параметры передаточных функции W11,W21,W12,W22 при 10000 экземпляров 50% validationdata 2-я половина

Рисунок 61 – параметры передаточных функции W11,W21,W12,W22 при 100000 экземпляров 0,5% validationdata база

Рисунок 62 – параметры передаточных функции W11,W21,W12,W22 при 100000 экземпляров 5% validationdata база

Рисунок 63 – параметры передаточных функции W11,W21,W12,W22 при 100000 экземпляров 50% validationdata база

Рисунок 64 – параметры передаточных функции W11,W21,W12,W22 при 100000 экземпляров 0,5% validationdata 2-я половина


Рисунок 65 – параметры передаточных функции W11,W21,W12,W22 при 100000 экземпляров 5% validationdata 2-я половина
Рисунок 66 – параметры передаточных функции W11,W21,W12,W22 при 100000 экземпляров 50% validationdata 2-я половина
Вывод к 3 части курсовой работы: по данным эксперимента точность идентификации bestfit при увеличении мощности шума понижается, а также bestfit повышается чем больше экземпляров (1000,10000,100000). Значения полученные через processmodels точнее чем метод PEM (PredictionErrorMinimization).