Тема1.«Статика»
1. Плечо силы при определении момента силы относительно точки
1. Длина вектора силы
2. Кратчайшее расстояние от точки, относительно которой определяется момент, до точки приложения вектора силы
3. Расстояние от начала выбранной системы координат до точки приложения силы
4. Длина перпендикуляра, опущенного из точки, относительно которой определяется момент силы, на линию действия силы
5. Расстояние от начала выбранной системы координат до точки, относительно которой определяется момент силы
2. Даны две силы – одна равнодействующая данной системы сил, а другая уравновешивающая этой же системы. Направление эти силы относительно друг друга
1. Они направлены в одну сторону
2. Они направлены по одной прямой в противоположные стороны
3. Их взаимное расположение может быть произвольным
3. Значение угла, при котором между линиями действия двух сил F1 и F2 величина их определяется по формуле
1. 0º
2. 90º
3. 180º
4. Значение угла, при котором между линиями действия двух сил F1 и F2 величина их равнодействующей определяется по формуле R = F1 - F2
1. 0º
2. 90º
3. 180º
5. Реакция опоры приложена
1. К самой опоре
2. К опирающемуся телу
6. На шероховатую поверхность опирается тело. Реакция этой поверхности направлена
1. Перпендикулярно к поверхности
2. Параллельно поверхности
3. Под углом к поверхности
7.
| D |
| C |
| В |
| А |
| O |
1. ОА
2. АВ
3. ВС
4. CD
5. OD
8. Многоугольник сил, соответствующий уравновешенной системе сходящихся сил
| А |
| В |
| А |
| В |
| O |
| O |
| O |
| D |
| D |
| D |
| С |
| С |
| С |
| В |
| А |
9. Значение угла β, между силой и осью проекции, при котором сила равна нулю
1. β=0º
2. β=90º
3. β =180º
10. Эффект действия пары сил на тело …
1. зависит от ее положения в плоскости.
2. не зависит от ее положения в плоскости
11. Уравнение, при котором плоская система сходящихся сил уравновешена
1. Rx=0 H; Ry=40 H
2. Rx=30 H; Ry=0 H
3. Rx=0 H; Ry=0 H
12. Расположение центра тяжести, если тело имеет ось симметрии.
1. На оси симметрии
2. Положение центра тяжести нельзя определить
13. Пара сил изображена на рисунке
| F |
| F’ |
| F=F’ |
| F |
| F’ |
| F=F’ |
| F |
| F’ |
| F’=2F |
| F |
| F’ |
| F=F’ |
1 2 3 4
14. Количество уравнений равновесия для плоской системы сходящихся сил
1. Одно
2. Два
3. Три
15. Количество уравнений равновесия для пространственной системы сходящихся сил
1. Два
2. Три
3. Шесть
16. Количество уравнений равновесия для пространственной системы произвольно расположенных сил
1. Три
2. Пять
3. Шесть
17. 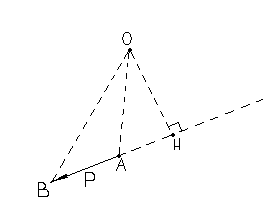 Отрезок определяющий плечо силы Р относительно точки О
Отрезок определяющий плечо силы Р относительно точки О
1. Отрезок ОВ
2. Отрезок ОА
3. Отрезок ОН
18. Уравнение момента силы относительно точки Н
1. МН=Р·АН
2. МН=Р·ВН
3. МН=0
19. Уравнение момента силы Q относительно оси Х 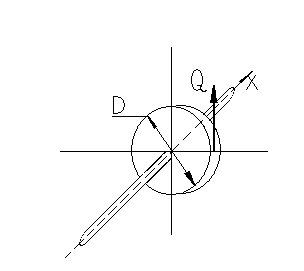
1. Mx= - Q·D/2
2. Mx= Q·D
3. Mx= Q·D/2
4. Mx= - Q·D
20. Момент силы относительно оси не равен нулю
1. Когда вектор силы лежит на оси
2. Когда вектор силы параллелен оси
3. Когда линия действия вектора силы и ось образуют скрещивающиеся прямые
4. Когда линия действия силы пересекает ось
5. Когда плечо силы равно нулю
21. Единица измерения момента силы относительно центра (точки)
1. м
2. Величина безразмерная
3. Н /м
4. м2
5. Н · м
22. Плечом силы при определении момента силы относительно точки является
1. Длина вектора силы
2. Кратчайшее расстояние от точки, относительно которой определяется момент, до точки приложения вектора силы
3. Расстояние от начала выбранной системы координат до точки приложения силы
4. Длина перпендикуляра, опущенного из точки, относительно которой определяется момент силы, на линию действия силы
5. Расстояние от начала выбранной системы координат до точки, относительно которой определяется момент силы
23. Единицаизмерения величины интенсивностей нагрузок, распределенных равномерно или по линейному закону
1. м
2. Величина безразмерная
3. Н /м
4. м2
5. Н · м
24. Количество параметров характеризующих векторную величину силы
1. Один
2. Два
3. Три
4. Пять
5. Шесть
25. На шероховатую поверхность опирается тело. Реакция этой поверхности направлена
1. Перпендикулярно к поверхности
2. Параллельно поверхности
3. Под углом к поверхности
4. Может быть направлена как угодно
26. Вектор силового многоугольника,который является равнодействующей силой
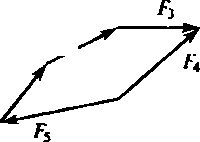
1. F3
2. F4
3. F5
4. Данная сила не указана
27. Действие силы на тело не определяется
1. Числовым значением (модулем)
2. Направлением
3. Точкой приложения
4. Геометрическим размером
28. Заданные системы силы образуют пары сил
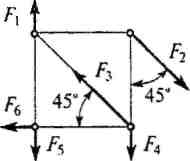
1. F1F4 и F5F6
2. F2F3 и F4F5
3. F1F4 и F2F3
4. F2F3 и F5F6
29. При определении центра тяжести плоской фигуры эту фигуру нельзя разбить на две части с известными положениями центра тяжести
1. 1
2. 2
3. 3
4. 4
30. Единицу измерения силы в системе СИ
1. Паскаль
2. Ньютон
3. Герц
31. Парой сил называется
1. Две силы, которые сходятся в одной точке
2. Любые две силы, лежащих на параллельных прямых
3. Две силы, лежащие на одной прямой, равные между собой, но противоположные по направлению
4. Две силы, лежащие на параллельных прямых, равные по модулю, но противоположные по направлению
32. Проекция силы на ось Х равна
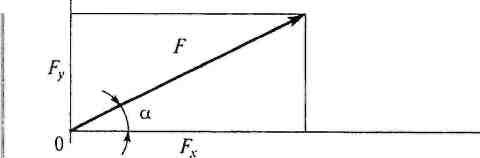
1. FX= Fcosα
2. FX= Fsinα
3. FX= - Fcosα
4. FX= - Fsinα
5.
33. Заданные системы силы образуют пары сил
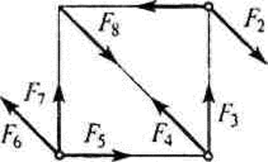
1. F6F4 и F8F2
2. F6F8 и F4F2
3. F5F8 и F1F3
4. F8F4 и F5F8
34.  Уравнение равновесия, которую нужно использовать, чтобы
Уравнение равновесия, которую нужно использовать, чтобы
найти XA
1. ΣFΧ=0
2. ΣFY=0
3. ΣMΧ=0
4. ΣMY=0
35. В одном из рисунков для определения положения центра тяжести необходимо определить две координаты расчетным путем
1. 1
2. 2
3. 3
4. 4
36. Статика изучает
1. Движение тела под действием приложенных к нему сил
2. Условия равновесия тел
3. Движение тела без учета действующих на него сил
4. Способы взаимодействия тел между собой
37. Наиболее подходящая система уравнений равновесия для определения реакций в опорах изображенной балки
1. ΣFΧ=0; ΣFY=0; ΣMB=0;
2. ΣFΧ=0; ΣFY=0; ΣMA=0;
3. ΣFΧ=0; ΣMA=0; ΣMB=0;
4. ΣFY=0; ΣMA=0; ΣMC=0.
38. После приведения к некоторому центру систему сил, действующих на него, главный вектор и главный момент оказались равными нулю. Тело движется
1. Прямолинейно
2. Вращается
3. Участвует в сложном движении
4. Находится в равновесии
39. Реакция шарнирно-неподвижной опоры без трения проходит
1. По касательной к шарниру
2. Через центр шарнира
3. Вне шарнира
4. Через хорду шарнира
Тема 2. «Кинематика»
40. Точка движется согласно уравнению S = 2 + 0,1t3. Определить вид движения точки
1. Равномерное
2. Равноускоренное
3. Равнозамедленное
4. Неравномерное
41. Точка движется согласно уравнению S = 2 + 0,6t. Определить вид движения
точки
1. Равномерное
2. Равноускоренное
3. Равнозамедленное
4. Неравномерное
42. По графику скоростей определить вид движения на участке 3
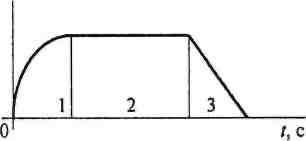
|
| V, м/с |
1. Равномерное
2. Равноускоренное
3. Равнозамедленное
4. Неравномерное
43. При указанных кинематических параметров точка движется равномерно
1. V ≠ const
2. aτ = const
3. aτ = 0
4. aτ> 0
5. an = 0
44. Изменение данного параметра по времени характеризует угловое ускорение
1. Угловая скорость
2. Угол поворота
3. Длина дуги
4. Окружная скорость точки
5. Ускорение точки
45. Характеристикой быстроты и направления движения точки является
1. Скорость
2. Ускорение
3. Перемещение
4. Вращение
46. Составляющая ускорения точки, характеризующая изменение величины скорости
1. Нормальное ускорение
2. Касательное ускорение
47. Геометрическая точка, которая является мгновенным центром ускорений плоской фигуры
1. Геометрическая точка плоской фигуры, скорость которой равна нулю
2. Геометрический центр плоской фигуры
3. Центр тяжести плоской фигуры
4. Центр масс плоской фигуры
5. Точка, относительно которой определяется сумма моментов сил
48. После приведения системы сил к некоторому центру, действующих на него, главный вектор равен нулю, а главный момент не равный нулю. Тело движется
1. Прямолинейно
2. Вращается
3. Участвует в сложном движении
4. Находится в равновесии
49. Уравнение, которое описывает векторный способ задания движения точки
1. y = f (x)
2. r = f (t)
3. ω = f (t)
4. mVt – mV0 = S
5. F = ma
50. Параметр, числовое значение которого не может быть отрицательным
1. Проекция вектора силы на ось
2. Момент силы относительно оси
3. Нормальное ускорение
4. Касательное ускорение
5. Момент силы относительно точки
51. При указанных кинематических параметрах точка движется прямолинейно
1. aτ = 0
2. aτ ≠ const
3. V = const
4. aτ> 0
5. an = 0
52. При указанных кинематических параметрах точка движется ускоренно
1. aτ = 0
2. an ≠ const
3. V = const
4. aτ> 0
5. an = 0
53. При указанных кинематических параметрах точка движется криволинейно
1. aτ ≠ const
2. V = const
3. aτ> 0
4. an = 0
5. an ≠ 0
54. При указанных кинематических параметрах точка движется замедленно
1. aτ = 0
2. an> 0
3. V = const
4. aτ< 0
5. an = 0
55. Изменение этого параметра по времени характеризует угловую скорость
1. Угловое ускорение
2. Угол поворота
3. Длина дуги
4. Окружная скорость точки
5. Ускорение точки
56. Мгновенным центром скоростей плоской фигуры является
1. Геометрическая точка плоской фигуры, скорость которой равна нулю
2. Геометрический центр плоской фигуры
3. Центр тяжести плоской фигуры
4. Центр масс плоской фигуры
5. Точка, относительно которой определяется сумма моментов сил
57. Параметр, имеющий только положительное значение
1. Работа силы
2. Момент силы относительно оси
3. Нормальное ускорение
4. Касательное ускорение
5. Импульс силы
58. Ускоренное вращательное движение твердого тела
p lK6sySi3sB1x8E62N8oH2VdS9+oSyk0rkyhaSaMaDgu16mhXU/lZnA3Cc7Jcnh7j/WH78prs9fDR fBfFDvFmNm4fQHga/X8YfvEDOuSB6WjPrJ1oEW7Xq/DFI8zXIIL/p48Id3EMMs/k9YH8BwAA//8D AFBLAQItABQABgAIAAAAIQC2gziS/gAAAOEBAAATAAAAAAAAAAAAAAAAAAAAAABbQ29udGVudF9U eXBlc10ueG1sUEsBAi0AFAAGAAgAAAAhADj9If/WAAAAlAEAAAsAAAAAAAAAAAAAAAAALwEAAF9y ZWxzLy5yZWxzUEsBAi0AFAAGAAgAAAAhALCGO8RmAgAAhwQAAA4AAAAAAAAAAAAAAAAALgIAAGRy cy9lMm9Eb2MueG1sUEsBAi0AFAAGAAgAAAAhAJ2WigbeAAAACAEAAA8AAAAAAAAAAAAAAAAAwAQA AGRycy9kb3ducmV2LnhtbFBLBQYAAAAABAAEAPMAAADLBQAAAAA= " strokeweight="1.25pt"> y o6GNccilDHWLzoSFH5DYO/jRmcjn2Eg7mhOXu16qJLmVznTEH1oz4LrF+qM6Og3PKssOj+lmt3rZ qo2d3ruvqlprfXkxrx5ARJzjXxh+8BkdSmba+yPZIHoN6vqGt0Q27lIQHPgV9iyoLAVZFvL/hPIb AAD//wMAUEsBAi0AFAAGAAgAAAAhALaDOJL+AAAA4QEAABMAAAAAAAAAAAAAAAAAAAAAAFtDb250 ZW50X1R5cGVzXS54bWxQSwECLQAUAAYACAAAACEAOP0h/9YAAACUAQAACwAAAAAAAAAAAAAAAAAv AQAAX3JlbHMvLnJlbHNQSwECLQAUAAYACAAAACEAS22Nw2sCAACHBAAADgAAAAAAAAAAAAAAAAAu AgAAZHJzL2Uyb0RvYy54bWxQSwECLQAUAAYACAAAACEA0DO1z94AAAAKAQAADwAAAAAAAAAAAAAA AADFBAAAZHJzL2Rvd25yZXYueG1sUEsFBgAAAAAEAAQA8wAAANAFAAAAAA== " strokeweight="1.25pt"> ω ωωωω ε
H2 JvE599LO5szl3slcqTvpzUj8YTATPgzYfR1OXsP+8+Xx9nVpfXD2vm8+rG/Uc6719dW634JIuKa/ MPziMzrUzNSGE9konIYiU7wlsaEyEBwo8oKFVkNeZCDrSv5fUP8AAAD//wMAUEsBAi0AFAAGAAgA AAAhALaDOJL+AAAA4QEAABMAAAAAAAAAAAAAAAAAAAAAAFtDb250ZW50X1R5cGVzXS54bWxQSwEC LQAUAAYACAAAACEAOP0h/9YAAACUAQAACwAAAAAAAAAAAAAAAAAvAQAAX3JlbHMvLnJlbHNQSwEC LQAUAAYACAAAACEAwNReAVsCAABqBAAADgAAAAAAAAAAAAAAAAAuAgAAZHJzL2Uyb0RvYy54bWxQ SwECLQAUAAYACAAAACEAkHt3OdwAAAAJAQAADwAAAAAAAAAAAAAAAAC1BAAAZHJzL2Rvd25yZXYu eG1sUEsFBgAAAAAEAAQA8wAAAL4FAAAAAA== "/>
ε ε
а) б) в) г) д)
1. а)
2. б)
3. в)
4. г)
5. д)
59. Радиус кривизны прямолинейного отрезка
1. Длина самого отрезка
2. Половина длины отрезка.
3. Нуль
4. Бесконечность
5. Число π
60. Замедленное вращательное движение твердого тела
p lK6sySi3sB1x8E62N8oH2VdS9+oSyk0rkyhaSaMaDgu16mhXU/lZnA3Cc7Jcnh7j/WH78prs9fDR fBfFDvFmNm4fQHga/X8YfvEDOuSB6WjPrJ1oEW7Xq/DFI8zXIIL/p48Id3EMMs/k9YH8BwAA//8D AFBLAQItABQABgAIAAAAIQC2gziS/gAAAOEBAAATAAAAAAAAAAAAAAAAAAAAAABbQ29udGVudF9U eXBlc10ueG1sUEsBAi0AFAAGAAgAAAAhADj9If/WAAAAlAEAAAsAAAAAAAAAAAAAAAAALwEAAF9y ZWxzLy5yZWxzUEsBAi0AFAAGAAgAAAAhAEzDxKtmAgAAhwQAAA4AAAAAAAAAAAAAAAAALgIAAGRy cy9lMm9Eb2MueG1sUEsBAi0AFAAGAAgAAAAhAJ2WigbeAAAACAEAAA8AAAAAAAAAAAAAAAAAwAQA AGRycy9kb3ducmV2LnhtbFBLBQYAAAAABAAEAPMAAADLBQAAAAA= " strokeweight="1.25pt"> ω ωω ε ω
ω
ε ε
а) б) в) г) д)
1. а)
2. б)
3. в)
4. г)
5. д)
61. Число степеней свободы тела в пространстве
1. Одна
2. Два
3. Три
4. Шесть
5. Девять
62. Равномерное вращательное движение твердого тела
ω ω ε ω ε ω
ω
ε ε
а) б) в) г) д)
1. а)
2. б)
3. в)
4. г)
5. д)
63. Переменный параметр, дифференцирование которого по времени позволяет определить закон изменения угловой скорости вращения тела
1. Угловое ускорение
2. Угол поворота
3. Длина дуги
4. Окружная скорость точки
5. Ускорение точки
64. Быстрота изменения скорости характеризуется
1. Скоростью
2. Перемещением
3. Вращением
4. Ускорением
65. Что изучает кинематика?
1. Движение тела под действием приложенных к нему сил
2. Виды равновесия тел
3. Движение тела без учета действующих на него сил
4. Способы взаимодействия тел между собой
Тема 3.«Динамика»
66. Материальная точка сохраняет состояние покоя или равномерного
прямолинейного движения до тех пор, пока действие других тел не
изменит это состояние
1. Основной закон динамики (2-й закон Ньютона)
2. Закон инерции (1-й закон Ньютона)
3. Закон равенства действия и противодействия (3-й закон Ньютона)
4. Закон независимости сил
67. Движение точки по отношению к подвижной системе координат
1. Относительное движение
2. Абсолютное движение
3. Переносное движение
4. Вращательное движение
68. Значение угла наклона вектора силы к направлению перемещения точки приложения силы, при которой работа силы будет отрицательной
1. 00
2. 450
3. 900
4. 1800
69. Зависимость, которая характеризует количество движения материальной точки
1. m· V2 /2
2. m· V
3. F· t
4. A /t
5. F· d
70. Работа силы тяжести тела будет равна нулю
1. При перемещении тела по наклонной плоскости снизу вверх
2. При перемещении тела по наклонной плоскости сверху вниз
3. При перемещении тела по горизонтальной плоскости
4. При вертикальном перемещении тела
5. При отсутствии сил сопротивления
71. Зависимость, которая характеризует кинетическую энергию материальной точки
1. m ·V2/2
2. m· V
3. F· t
4. A /t
5. F· d
72. Зависимость, которая характеризует импульс силы
1. m·V2 /2
2. m·V
3. F· t
4. A /t
5. F·d
73. Угол наклона вектора силы к направлению перемещения точки приложения силы, при котором работа этой силы будет равна нулю
1. 00
2. 450
3. 900
4. 1800
74. Раздел теоретической механики, рассматривающее движение материальных точек или тел под действием приложенных сил; устанавливается связь между приложенными силами и вызываемым ими движением
1. Статика
2. Кинематика
3. Динамика
75. Основной закон динамики
1. F=m·a
2. m ·V2/2
3. m· V
4. F· t
76. В каждый момент движения сумма активных сил, реакций связей
и сил инерции равна нулю – это принцип
1. Даламбера
2. Пуассона
3. Ньютона
4. Гука
77. Единица измерения коэффициента трения качения
1. м
2. Величина безразмерная
3. Н /м
4. м2
5. Н · м
78. Единица измерения коэффициента трения скольжения
1. м
2. Величина безразмерная
3. Н /м
4. м2
5. Н ∙ м
79. Движение подвижной системы отчета относительно неподвижной системы
1. Относительное движение
2. Абсолютное движение
3. Переносное движение
4. Вращательное движение