XI. Уравновешивание рычажных механизмов
Общие сведения
Большинство звеньев рычажных механизмов совершают вращательное, поступательное или плоское движение. Звенья, совершающие плоское движение, входят в поступательные и вращательные пары.
К таким звеньям относятся шатуны двигателей внутреннего сгорания.
Наиболее тяжёлые их части, кривошипные и поршневые головки, при решении задачи уравновешивания разделяют: одну из них относят к кривошипу, другую – к поршню и вместе с ними уравновешивают.
Для вала, как для ротора, определяется масса противовеса. Задача уравновешения поршня и поршневой головки шатуна сложнее.
Если допустимы большие габариты, можно расположить цилиндры симметрично (рис.1) и силы инерции попарно уравновесятся.
 Рис.1
Рис.1
В высокооборотных двигателях внутреннего сгорания силы инерции поршней уравновешивают противовесами на зубчатых колёсах вращающимися на валу двигателя (рис.2).
 Рис.2 Система противовесов, уравновешивающих сил инерции поршня
Рис.2 Система противовесов, уравновешивающих сил инерции поршня
Статическое уравновешивание рычажных механизмов.

 Если главный вектор инерции ΦS = 0, то такой механизм называется статически уравновешенным. Если главный момент сил инерции МS = 0, то механизм называется моментно-уравновешенным.
Если главный вектор инерции ΦS = 0, то такой механизм называется статически уравновешенным. Если главный момент сил инерции МS = 0, то механизм называется моментно-уравновешенным.



 Рассмотрим случай, когда надо уравновесить механизм статически, т.е. ΦS = 0 (рис. 3, 1-4 звенья). Этого можно добиться только тогда, когда aS = 0, т.к. S → A, ΦS = -maS, где aS – ускорение центра масс S звена.
Рассмотрим случай, когда надо уравновесить механизм статически, т.е. ΦS = 0 (рис. 3, 1-4 звенья). Этого можно добиться только тогда, когда aS = 0, т.к. S → A, ΦS = -maS, где aS – ускорение центра масс S звена.
Когда центр масс совмещён с A, то он становится неподвижным. Этого добиваются с помощью двух противовесов, один из которых устанавливают на продолжение шатуна, а другой – на продолжении кривошипа.
Для того чтобы рассчитать массы противовесов, применяют метод замещающих масс, суть которого заключается в том, что масса каждого звена условно распределяется по двум точкам (рис.4).


Рис.3 Статическое уравновешение Рис.4 Расчёт массы противовесов
При этом выполняется следующее: масса этого звена разносится по точкам A и B так, чтобы положение центра масс не изменилось.
m = mA + mB,
lAB = lAS + lBS,
mA lAS = mB lBS.
Масса 3-го звена сосредоточивается в т.С (рис.5)

Масса 2-го звена распределятся по шарнирам В и С. Если на продолжении звена 2 поставить противовес массой mП2 на расстоянии от т.В, равном lП2, то центр масс звеньев 2 и 3 переместится в т.В, при этом
mП2lП2 = (m2C + m3C)lBC.
В этом случае либо задаются массой противовеса и определяют lП2, либо задаются lП2 и определяют массу противовеса
mП1lП1 = (m1B + mП2 + m2B + m2C + m3C) lAB.
Рис.5 Сосредоточение массы 3-го звена
в точке С
После всех указанных мероприятий центр масс переместится в точку A, однако не всегда конструктивно можно установить противовес на продолжение шатуна, поэтому ограничиваются установкой противовеса на звене l. Тогда центр масс системы смещают на линию AC, и этот центр масс перемещается с постоянным ускорением а = const.
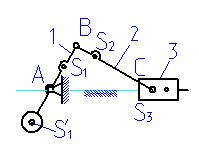
 В этом случае механизм – частично статически уравновешенный (рис.6), его нежелательно устанавливать на высоком фундаменте, т.к. главный вектор сил инерции создаёт опрокидывающий момент, что недопустимо.
В этом случае механизм – частично статически уравновешенный (рис.6), его нежелательно устанавливать на высоком фундаменте, т.к. главный вектор сил инерции создаёт опрокидывающий момент, что недопустимо.
Рис.6 Частично статически уравновешенный
механизм
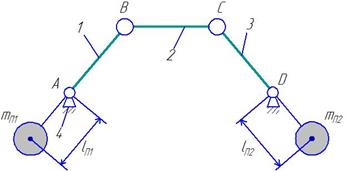
В четырёхшарнирном механизме (рис.7) центр масс системы разносится по точкам A и D, а противовесы устанавливаются на продолжении звеньев 1 и 3.
Рис.7 Четырёхшарнирный механизм
11.3 Задачи на уравновешивание рычажных механизмов
 11.1. Определить массу противовеса mп, который надо установить на вращающийся вал для уравновешивания сил инерции грузов с массами m1, m2, m3 и m4, лежащих в одной перпендикулярной к оси вала плоскости, если координата центра масс Sп противовеса равна ρп=15 мм; массы грузов
11.1. Определить массу противовеса mп, который надо установить на вращающийся вал для уравновешивания сил инерции грузов с массами m1, m2, m3 и m4, лежащих в одной перпендикулярной к оси вала плоскости, если координата центра масс Sп противовеса равна ρп=15 мм; массы грузов
m1= 5 кг, m2= 7 кг, m3 = 8 кг, m4 = 10 кг; расстояния от оси вала до центров масс S1, S 2, S 3 и S 4, грузов равны ρ1 = 10 мм, ρ2 = 20 мм, ρ3 = 15 мм, ρ4 = 10 мм; углы закрепления грузов α12 = α23 = α 34 = 90°.
 11.2. Определить массы противовесов mпI и mпII, которые надо установить в плоскостях исправления I и II для уравновешивания сил инерции грузов с массами m1, m2, m3 и m4, лежащих в плоскости, содержащей ось вала, если координаты центров масс SпI и S пII противовесов равны ρпI = 50 мм, ρ пII = 40 мм. Массы грузов: m1 = 2 кг, m2 =3 кг, m3 = 2 кг, m4 = 4 кг; координаты центров масс S1, S 2, S 3 и S 4 грузов: ρ1 =10 мм, ρ 2 = 15 мм, ρ 3 = 12 мм, ρ 4 = 20 мм; расстоянии между грузами l 12 = l 23 = l 34 = 100 мм.
11.2. Определить массы противовесов mпI и mпII, которые надо установить в плоскостях исправления I и II для уравновешивания сил инерции грузов с массами m1, m2, m3 и m4, лежащих в плоскости, содержащей ось вала, если координаты центров масс SпI и S пII противовесов равны ρпI = 50 мм, ρ пII = 40 мм. Массы грузов: m1 = 2 кг, m2 =3 кг, m3 = 2 кг, m4 = 4 кг; координаты центров масс S1, S 2, S 3 и S 4 грузов: ρ1 =10 мм, ρ 2 = 15 мм, ρ 3 = 12 мм, ρ 4 = 20 мм; расстоянии между грузами l 12 = l 23 = l 34 = 100 мм.
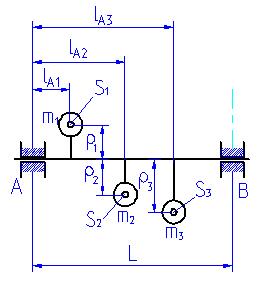 11.3. Определить реакции RA и RB в подшипниках вала от сил инерции грузов, массы которых равны m1 = 1,0 кг, m2 = 0,5 кг, m3 = 0,25 кг; центры масс всех грузов расположены в плоскости, содержащей ось вращения вала АВ. Координаты центров масс S1, S 2, и S 3 грузов: ρ1 = 100 мм, ρ2 = 100 мм, ρ3 = 200 мм; расстояния грузов от подшипника А: lA1 = 100 мм, lA2 = 300 мм, lA3 = 400 мм; расстояние между опорами А и В равно L = 500 мм, угловая скорость вала ω = 20 сек-1.
11.3. Определить реакции RA и RB в подшипниках вала от сил инерции грузов, массы которых равны m1 = 1,0 кг, m2 = 0,5 кг, m3 = 0,25 кг; центры масс всех грузов расположены в плоскости, содержащей ось вращения вала АВ. Координаты центров масс S1, S 2, и S 3 грузов: ρ1 = 100 мм, ρ2 = 100 мм, ρ3 = 200 мм; расстояния грузов от подшипника А: lA1 = 100 мм, lA2 = 300 мм, lA3 = 400 мм; расстояние между опорами А и В равно L = 500 мм, угловая скорость вала ω = 20 сек-1.

11.4. Определить массы противовесов mпI и mпII, которые надо установить в плоскостях исправления I и II для уравновешивания сил инерции грузов m1 и m2, лежащих в плоскости, содержащей ось вращения вала, если координаты центров масс SпI и S пII противовесов равны
ρ пI = ρ пII = 100 мм. Массы грузов: m1 = 20 г, m2 = 10 г, координаты центров масс S1 и S 2 грузов от плоскости исправления I: lA1 = 200 мм, lA2 = 400 мм, расстояние между плоскостями исправления L = 600 мм;
ρ1 = ρ2 = 100мм.
 11.5.Определить массы противовесов mпI и mпII и углы их закрепления βI и βII (отсчитываемые от линии OS2 в направлении против движения стрелки часов) для уравновешивания сил инерции грузов m1, m2, если координаты центров масс S1 и S 2 противовесов равны ρ пI = ρ пII = 10 мм. массы грузов: m1= 1,0 кг, m2= 2,0 кг. Расстояния от оси вала центров масс S1 и S 2 грузов равны ρ1 =10 мм, ρ 2 = 5 мм, lA1 = 100 мм, lA2 = 300 мм, L = 400 мм, угол закрепления α12= 90°.
11.5.Определить массы противовесов mпI и mпII и углы их закрепления βI и βII (отсчитываемые от линии OS2 в направлении против движения стрелки часов) для уравновешивания сил инерции грузов m1, m2, если координаты центров масс S1 и S 2 противовесов равны ρ пI = ρ пII = 10 мм. массы грузов: m1= 1,0 кг, m2= 2,0 кг. Расстояния от оси вала центров масс S1 и S 2 грузов равны ρ1 =10 мм, ρ 2 = 5 мм, lA1 = 100 мм, lA2 = 300 мм, L = 400 мм, угол закрепления α12= 90°.

11.6. Предполагая, что все силы инерции звеньев приведены к общему центру масс S, определить точку приложения, модуль и направление главного вектора сил инерции подвижных звеньев кривошипно-ползунного механизма при φ1=45°, если lAB = 50 мм, lBC = 150 мм; координаты центров масс S1, S2 и S3 звеньев равны lAS1 = 20 мм, lBS2 = 75 мм, lCS3 = 0, массы звеньев m1 = 2,5 кг, m2 = 1 кг, m3 = 1,5 кг. Угловая скорость кривошипа АВ постоянна и равна ω1=100 сек-1.
Указание. Предусматривается графическое решение, поэтому предварительно надо построить схему механизма, одна точка которого копирует движение общего центра масс подвижных звеньев.
 11.7. Определить модуль и направление главного вектора сил
11.7. Определить модуль и направление главного вектора сил
инерции подвижных звеньев кривошипно-ползунного механизма
при φ1=45°, если lAB = 50 мм, lBC = 150 мм; координаты центров масс S1, S2 и S3 звеньев равны lAS1 = 10 мм, lBS2 = 75 мм, lCS3 = 0, массы звеньев m1 = 2,5 кг, m2 = 1 кг, m3 = 1,5 кг. Угловая скорость кривошипа АВ постоянна и равна ω1=100 сек-1. Указание. При решении использовать формулу 
где ас — ускорение точки С, ав — ускорение точки В.
11.  8. Определить массы противовесов mп1, mп2, mп3, необходимых для полного уравновешивания главного вектора сил инерции механизма шарнирного четырехзвенника, если lAB = 120 мм, lBC = 400 мм, lCD = 280 мм, координаты центров масс S1, S2 и S3 звеньев равны lAS1 = 75 мм, lBS2 = 200 мм, lCS3 = 130 мм, массы звеньев m1 = 0,1 кг, m2 = 0,8 кг, m3 =0 ,4 кг, координаты центров масс S ' 1, S ' 2, S ' 3 противовесов lAS ' 1 = 100 мм, lBS ' 2 = 200 мм, lCS ' 3 = 130 мм. Задачу решить, полагая, что общий центр масс подвижных звеньев механизма должен быть неподвижен и лежать в точке А.
8. Определить массы противовесов mп1, mп2, mп3, необходимых для полного уравновешивания главного вектора сил инерции механизма шарнирного четырехзвенника, если lAB = 120 мм, lBC = 400 мм, lCD = 280 мм, координаты центров масс S1, S2 и S3 звеньев равны lAS1 = 75 мм, lBS2 = 200 мм, lCS3 = 130 мм, массы звеньев m1 = 0,1 кг, m2 = 0,8 кг, m3 =0 ,4 кг, координаты центров масс S ' 1, S ' 2, S ' 3 противовесов lAS ' 1 = 100 мм, lBS ' 2 = 200 мм, lCS ' 3 = 130 мм. Задачу решить, полагая, что общий центр масс подвижных звеньев механизма должен быть неподвижен и лежать в точке А.

11.9 Масса ползуна 3 кривошипно-ползунного механизма равна m3 =0 ,4 кг. Подобрать массы m1 и m2 шатуна ВС и кривошипа АВ таким образом, чтобы главный вектор сил инерции всех звеньев механизма был уравновешен. Координаты центров масс S1 и S2 звеньев АВ и ВС равны lAS1 = 100 мм, lBS2 = 100 мм, если lAB = 100 мм, lBC = 400 мм.

11.10. Определить массы противовесов mп1 и mп2, которые необходимо установить на кривошипе АВ и шатуне ВС для полного уравновешивания главного вектора сил инерции всех звеньев кривошипно-ползунного механизма, если координаты центров масс S1 и S2 этих противовесов lAS ' 1 = 500 мм, lBS ' 2 = 200 мм, lAB = 100 мм, lBC = 300 мм; координаты центров масс S1, S2 и S3 звеньев lAS1 = 75 мм, lBS2 = 200 мм, lCS3 = 100 мм; массы звеньев равны m1 = 0,1 кг, m2 = 0,7 кг, m2 = 0,8 кг.
 11.11. Определить массу противовеса mп, который необходимо установить на кривошипе АВ кривошипно-ползунного механизма для полного уравновешивания вертикальной составляющей главного вектора сил инерции всех звеньев механизма, если координата центров масс S ' 1 этого противовеса lAS ' 1 = 600 мм; размеры звеньев lAB = 100 мм, lBC = 500 мм; координаты центров масс S1, S2 и S3 звеньев lAS1 = 75 мм, lBS2 = 150 мм, lCS3 = 100 мм; массы звеньев равны m1 = 0,3 кг, m2 = 1,5 кг, m3 = 2,0 кг.
11.11. Определить массу противовеса mп, который необходимо установить на кривошипе АВ кривошипно-ползунного механизма для полного уравновешивания вертикальной составляющей главного вектора сил инерции всех звеньев механизма, если координата центров масс S ' 1 этого противовеса lAS ' 1 = 600 мм; размеры звеньев lAB = 100 мм, lBC = 500 мм; координаты центров масс S1, S2 и S3 звеньев lAS1 = 75 мм, lBS2 = 150 мм, lCS3 = 100 мм; массы звеньев равны m1 = 0,3 кг, m2 = 1,5 кг, m3 = 2,0 кг.
 11.12. Определить массу mп противовеса, который необходимо установить на кривошипе АВ кривошипно-ползунного механизма для уравновешивания сил инерции массы кривошипа и той части массы шатуна ВС, которая может быть отнесена к точке В после разноса (статического) его массы на две, сосредоточенные в точках В и С, если координата центра масс S ' 1 противовеса lAS ' 1 = 600 мм. Размеры звеньев lAB = 100 мм, lBC = 500 мм; координаты центров масс S1, S2 и S3 звеньев lAS1 = 75 мм, lBS2 = 150 мм, lCS3 = 100 мм; массы звеньев равны m1 = 0,3 кг, m2 = m3 = 1,5 кг.
11.12. Определить массу mп противовеса, который необходимо установить на кривошипе АВ кривошипно-ползунного механизма для уравновешивания сил инерции массы кривошипа и той части массы шатуна ВС, которая может быть отнесена к точке В после разноса (статического) его массы на две, сосредоточенные в точках В и С, если координата центра масс S ' 1 противовеса lAS ' 1 = 600 мм. Размеры звеньев lAB = 100 мм, lBC = 500 мм; координаты центров масс S1, S2 и S3 звеньев lAS1 = 75 мм, lBS2 = 150 мм, lCS3 = 100 мм; массы звеньев равны m1 = 0,3 кг, m2 = m3 = 1,5 кг.
 11.13. Определить массу mп противовеса, который необходимо установить на кривошипе АВ кривошипно-ползунного механизма для уравновешивания главного вектора сил инерции звеньев механизма, если координата центра масс S ' 1 противовеса lAS ' 1 = 600 мм. Размеры звеньев lAB = 100 мм, lBC = 500 мм; координаты центров масс S1, S2 и S3 звеньев lAS1 = 75 мм, lBS2 = 200 мм, lCS3 = 100 мм; массы звеньев равны m1 = 0,3 кг, m2 = 1,5 кг, m3 = 3,0 кг.
11.13. Определить массу mп противовеса, который необходимо установить на кривошипе АВ кривошипно-ползунного механизма для уравновешивания главного вектора сил инерции звеньев механизма, если координата центра масс S ' 1 противовеса lAS ' 1 = 600 мм. Размеры звеньев lAB = 100 мм, lBC = 500 мм; координаты центров масс S1, S2 и S3 звеньев lAS1 = 75 мм, lBS2 = 200 мм, lCS3 = 100 мм; массы звеньев равны m1 = 0,3 кг, m2 = 1,5 кг, m3 = 3,0 кг.
Указание. Предварительно развести статически массу шатуна на две точки, совпадающие с точками В и С. У ползуна уравновешивать только силу инерции первого порядка.
 11.14. Определить массы mп1 и mп2 противовесов, которые надо установить на колесах а и б для полного уравновешивания сил инерции первого порядка звеньев кривошипно-ползунного механизма, если координаты центров масс SпI и SпII противовесов lASп1 = lDSп1 = 50 мм, а радиусы колес одинаковы. Размеры звеньев: lAB = 100 мм, lBC = 400 мм; координаты центров масс S1, S2 и S3 звеньев lAS1 = 30 мм, lBS2 = 100 мм, lCS3 = 0; массы звеньев равны m1 = 2,5 кг, m2 = 1,0 кг, m3 = 3,0 кг.
11.14. Определить массы mп1 и mп2 противовесов, которые надо установить на колесах а и б для полного уравновешивания сил инерции первого порядка звеньев кривошипно-ползунного механизма, если координаты центров масс SпI и SпII противовесов lASп1 = lDSп1 = 50 мм, а радиусы колес одинаковы. Размеры звеньев: lAB = 100 мм, lBC = 400 мм; координаты центров масс S1, S2 и S3 звеньев lAS1 = 30 мм, lBS2 = 100 мм, lCS3 = 0; массы звеньев равны m1 = 2,5 кг, m2 = 1,0 кг, m3 = 3,0 кг.
Указание. Решить задачу в следующей последовательности:
а) уравновесить силы инерции звеньев механизма в вертикаль-
ном направлении;
б) уравновесить силы инерции звеньев в горизонтальном направ-
лении. Принимать во внимание только силы инерции первого
порядка.