Аппарат предназначен для снабжения инвалидов с вялым параличом верхней конечности при отсутствии активного сгибания и разгибания пальцев кисти и локтевого сустава. Конструкция аппарата состоит из следующих основных частей: кистедержателя 1 (рис. 5) с электромеханическим приводом б, гильзы предплечья 2, гильзы плеча 10, электромеханического привода 5 локтевого шарнира 3 с замком, наплечника 11, крепления 4, токосъемного устройства 9, системы управления 7, двух источников питания 8.
Кистедержатель состоит из рычагов 2 и 5 (рис. 6), соответствующих I, II и III пальцам; планки 3 и шины 4. Элементы 2, 3, 4 и 5 образуют механизм антипараллелограмма, неподвижным основанием которого является опорная шина 4. На рычагах 2 н 5 укреплены полукольца 1, охватывающие фаланги пальцев. К рычагам и опорной шине кистедержателя кнопками прикреплены ремешки, фиксирующие кисть и пальцы в кистсдержателе. Шарниры рычагов расположены соосно с суставами I, II и III пальцев по принципу кинематического подобия.
Электромеханический привод кистедержателя такой же, как в протезах кистей. Ползун редуктора привода с помощью тяги шарнирно соединен с рычажной системой кистедержателя. Гильзы предплечья и плеча шарнирно соединены между собой механизмом локтя с замком в виде зубчатого сектора и защелки. На гильзе плеча установлен электромеханический привод локтя, состоящий из трех ступеней зубчатых колес и выходной винтовой пары. Ползун винтовой пары шарнирно соединен тягой с гильзой предплечья. При выключенном замке механизма локтевого шарнира привод позволяет осуществлять активное сгибание и разгибание в локтевом суставе. Электронная система управления, как и в протезах с биоэлектрическим управлением, состоит из токоотводящих электродов, усилителя, преобразователя биоэлектрических сигналов, отводимых с паретичных мышц, и источника питания.
Биоэлектрические сигналы паретичных мышц отличаются от сигналов усеченных в результате ампутации мышц и от сигналов мышц в норме. Если биоэлектрические сигналы с усеченных или нормальных мышц имеют непрерывный характер, то сигналы паретичных мышц носят явно выраженный импульсный характер, причем чем выше степень пареза, тем отчетливее он проявляется.
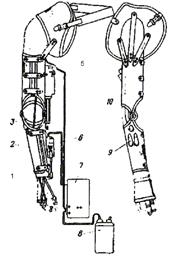
Рис. 5. Ортопедический аппарат на верхнюю конечность с биоэлектрическим управлением.

Рис. 6. Кистедержатель.

Рис. 7. Блок-схема системы биоэлектрического управления ортопедическим аппаратом.
Зависимость параметров биоэлектрического сигнала паретичных мышц от степени напряжения (сокращения) последних сложна. При небольших напряжениях мышц растет сначала амплитуда, а затем с увеличением напряжения растет частота следования их при относительно постоянной амплитуде.
В связи с этим для управления механизмами аппарата выбран частотный способ биоэлектрического управления. Соответственно этому и строится система управления. Отводимый с мышц сигнал поверхностными электродами 1 (рис. 7) усиливается по амплитуде в усилителе напряжения 2 и поступает в блок частотного выделения информации 3. Если амплитуда импульсов биоэлектрического сигнала превышает порог срабатывания, блок 3 отвечает прямоугольными импульсами определенной амплитуды и длительности. Далее эти импульсы сглаживаются фильтром 4 и усиливаются по мощности в усилителе 5, в нагрузку которого включено реле. Порог срабатывания этого реле определяется числом импульсов в единицу времени, вызывающих срабатывание блока 3.
При срабатывании реле электродвигатель привода подключается к источнику питания. Срабатывание реле во втором канале обеспечивает подключение этого же двигателя к источнику питания в противоположной полярности. Таким образом, двухканальное управление обеспечивает реверсивную работу исполнительного механизма. При подаче сигнала на входы обоих каналов системы управления одновременно срабатывает переключающее устройство 6 и переключает систему управления на другой электродвигатель, как это имеет место и в протезах с двумя управляемыми функциями. Для перехода с управления локтевым механизмом на управление кистедержателем необходимо снова подать на входы системы управления одновременно сигналы с обеих управляющих мышц. В этом случае переключающее устройство снова переключится, но уже в исходное состояние, и реле РЗ возвратится также в исходное положение, а его контакты отключат от системы управления электродвигатель М2 и присоединят к ней электродвигатель Ml.
Питание системы управления, включая и электродвигатели приводов, осуществляется от двух источников. Электронная часть, т. е. усилительные каналы и переключающее устройство питаются от одной батареи аккумуляторов, а электродвигатели Ml и М2 вместе с реле Р1 и Р2 от другой батареи пли от сетевого источника питания. Сетевой источник питания представляет собой обычный двухполупериодный выпрямитель с П- образным индуктивно-емкостным сглаживающим фильтром, питающийся от электроосветительной сети через понижающий трансформатор. Снабжение системы управления двумя источниками питания нацелено на то, чтобы обеспечить дневной расход электроэнергии при пользовании аппаратом в бытовых или производственных условиях.
Основные технические характеристики аппарата
Масса без узла управления и источников питания, не более 1,5 кг
Масса груза, поднимаемого при сгибании в локте, не менее 0,5 кг
Сила схвата, развиваемая кистедержателем, не менее 5 Н
Номинальное напряжение аккумуляторной батареи, не более 15,5 В.
Номинальное напряжение сетевого источника питания 12В.
ЛИТЕРАТУРА
1. Белова А.Н. Нейрореабилитация.-М. Антидор, 2000 г. – 568с.
2. Прикладная лазерная медицина. Под ред. Х.П. Берлиена, Г.И. Мюллера.- М.: Интерэкспорт, 2007г.
3. Александровский А.А. Компьютеризованная кардиология. Саранск; "Красный Октябрь" 2005: 197.
4. Разработка и постановка медицинских изделий на производство. Государственный стандарт Республики БеларусьСТБ 1019-2000.
5. Штарк М.Б., Скок А.Б. Применение электроэнцефалографического биоуправления в клинической практике. М. - 2004 г
6. Боголюбов В.М., Пономаренко Г.Н. Общая физиотерапия. М.,СПб.: СЛП, 2008.
7. Ультрафиолетовое излучение в профилактике инфекционных заболеваний./ А.Л. Вассерман, М.Г. Шандала, В. Г.Юзбашев. М. 2003г.