Расчёт силовых катушек индуктивности электромагнитного ускорителя
Цель работы.
Аналитически и экспериментально разработать формулы и методы расчёта силовых электромагнитных катушек, в частности катушек ускорителей масс.
Актуальность.
В основе всех доступных методов расчёта электромагнитных катушек лежат экспериментально полученные формулы и коэффициенты, недостатком которых являются весьма ограниченные области их применения и узкий круг величин, которые можно с их помощью рассчитать. Аналитический подход к решению задачи позволит расширить список рассчитываемых величин, а также уменьшить число величин, определяемых экспериментально при изготовлении катушки.
Принцип работы электромагнитных ускорителей масс.
 |
Электромагнитный ускоритель массы – устройство, преобразующее электрическую энергию в кинетическую энергию ускоряемого объекта при помощи явления электромагнетизма. Чаще всего для такого преобразования используется электромагнит в виде катушки, который, втягивая в себя ускоряемый объект, придаёт ему некую скорость.
Основной задачей расчёта таких ускорителей является задача расчёта конечной скорости объекта по заданным параметрам катушки и самого объекта, и наоборот – расчёт катушки по заданной конечной скорости и параметрам объекта. Наиболее простой является первая задача, когда по заданной электромагнитной катушке необходимо рассчитать конечную скорость объекта, так как в этом случае гораздо меньше искомых величин. Поэтому при создании расчётных формул было принято решать именно её, что позволит в перспективе синтезировать решение обратной задачи.
Самым оптимальным способом решения данной задачи является поиск зависимости силы втягивания электромагнита от времени и нахождение изменения скорости ускоряемого объекта через закон изменения импульса:

Зная начальный импульс и его полное изменение, можно легко выразить конечную скорость ускоряемого объекта через его массу. Следовательно, необходимо выразить силу втягивания объекта в электромагнит:
1) Так как соленоид – электромагнит:  , где B – магнитная индукция, S - площадь поперечного сечения электромагнита,
, где B – магнитная индукция, S - площадь поперечного сечения электромагнита,  - магнитная проницаемость вакуума.
- магнитная проницаемость вакуума.
2) Магнитная индукция в соленоиде  , а индуктивность соленоида
, а индуктивность соленоида  , в случае, когда сердечник в соленоиде отсутствует. N – число витков соленоида, l – длинна соленоида, I – ток в соленоиде.
, в случае, когда сердечник в соленоиде отсутствует. N – число витков соленоида, l – длинна соленоида, I – ток в соленоиде.
3) Потокосцепление, опираясь на вышеизложенные формулы, можно записать  , тогда
, тогда  .
.
4) Подставим полученное выше выражение в формулу силы электромагнита  , таким образом сила втягивания сердечника в катушку пропорциональна квадрату тока в ней и квадрату её индуктивности.
, таким образом сила втягивания сердечника в катушку пропорциональна квадрату тока в ней и квадрату её индуктивности.
При заданных геометрических параметрах катушки индуктивность и сопротивление зависят от диаметра выбранного намоточного провода, причём ток тем больше, чем больше диаметр провода, а индуктивность – наоборот, меньше с увеличением диаметра. Индуктивность и сопротивление от диаметра провода были выражены и оформлены в среде Mathcad исходя из геометрии соленоида:

dp – диаметр намоточного провода, dt – диаметр трубки-каркаса, h – высота катушки, l – длинна катушки.
m – относительная магнитная проницаемость, m0 – магнитная проницаемость вакуума, r0 – удельное сопротивление меди.

 |
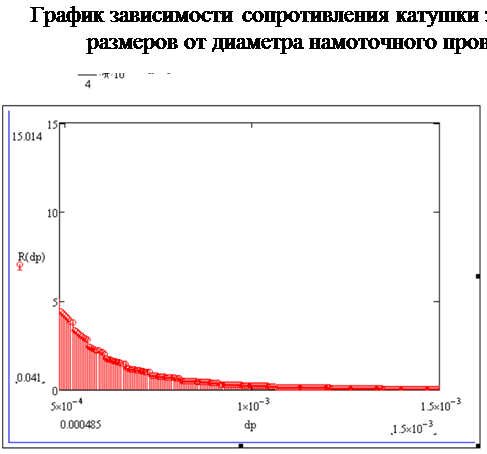 |
График зависимости индуктивности катушки заданных размеров от диаметра намоточного провода
Оператор “floor” в Mathcad используется для округления результата выражения в меньшую сторону. Он был введён в расчёты с целью исключить выход геометрических параметров катушки за пределы заданной границы.
Важно отметить, что расчёты справедливы только для соленоидов “правильной” формы, а также то, что при расчётах не учитываются паразитные ёмкости между слоями витков, которые могут повлиять на значение индуктивности при прямом её измерении.
Так как при перемещении ускоряющего объекта внутрь соленоида его индуктивность будет меняться, это необходимо учитывать при расчёте силы. Зависимость индуктивности от положения сердечника была определена экспериментально, путём измерения падения амплитуды синусоидального колебания на индуктивности относительно источника. На основании этой зависимости была построен график L(x), где x – длинна захода ускоряемого объекта в соленоид. Принципиальная схема эксперимента и полученные значения приведены ниже.

| x, мм | U на катушке, В |
| 2,9 | |
| 3,1 | |
| 3,2 | |
| 3,3 | |
| 3,4 | |
| 3,5 |
 |
На основании полученных данных, используя формулу реактивного сопротивления катушки индуктивности без учёта сдвига фазы сигнала
 и учитывая наличие активного сопротивления у катушки, была построена зависимость индуктивности от положения сердечника в ней(на графике все значения указаны в стандартных единицах):
и учитывая наличие активного сопротивления у катушки, была построена зависимость индуктивности от положения сердечника в ней(на графике все значения указаны в стандартных единицах):
Как видно из графика, зависимость линейная. Это значит, что изменение индуктивности от времени будет зависеть от скорости.
Рассмотрим зависимость тока от времени. Так как в качестве источника энергии для катушки ускорителей в подавляющем числе случаев является конденсатор, всю систему можно рассматривать как колебательный контур. Зависимость тока от времени в этом случае будет описываться функцией затухающих колебаний тока в цепи КК:  при
при  , такое представление учитывает ЭДС самоиндукции в катушке, а так же учитывает, что после полной разрядки конденсатора(t = 5RC) цепь размыкается.
, такое представление учитывает ЭДС самоиндукции в катушке, а так же учитывает, что после полной разрядки конденсатора(t = 5RC) цепь размыкается.
Так как L(x(t)), а I (L; t) найти изменение импульса аналитически не получится. В этом случае наиболее оптимально будет применить численный метод, взяв некое малое Δt, причём такое, чтобы изменение индуктивности и тока на этом промежутке времени было пренебрежительно мало. Тогда L и I на этом отрезке можно будет считать неизменными, и движение ускоряемого объекта будет равноускоренным, следовательно, используя закон изменения импульса, можно будет найти изменение скорости объекта на этом участке, а также расстояние, на которое объект втянуло в катушку:  .
.
Это позволит перейти к следующей итерации цикла подсчёта, так как будет известно значение индуктивности, полученное исходя из перемещения снаряда в предыдущей итерации. Таким образом, просуммировав все эти элементарные изменения импульсов можно найти полное изменение импульса, а значит и конечную скорость ускоряемой массы. Данный численный метод наиболее удобно реализовывать на программном уровне, что позволит получить не только конечный результат расчётов, но и пошаговый результат на каждом промежутке Δt.
Выводы.
Разработанные формулы и методы позволяют эффективно рассчитывать конечную и промежуточные скорости ускоряемого объекта, значительно уменьшая число величин, получаемых эмпирически. Также, опираясь на полученные результаты можно решить обратную задачу, а также задачу по оптимизации параметров катушки. В перспективе планируется разработать программу, позволяющую полностью рассчитывать все необходимые параметры, опираясь на заданные величины.
Источники:
- Расчет магнитного ускорителя масс // gauss2k.narod.ru URL: https://gauss2k.narod.ru/calc.htm
- Формулы и идеи // gauss2k.narod.ru URL: https://gauss2k.narod.ru/formid.htm
- Катушки индуктивности: теория, разновидности, применения. // Сандер Электроникс URL: https://sanderelectronics.ru/induction