В портальных кранах изменение вылета является рабочим, а не установочным движением, т. е. выполняется с грузом при высоких скоростях его горизонтального перемещения. Изменение вылета, как правило, совершается в каждом цикле и существенно влияет на производительность крана. Рабочий характер изменении вылета определяет два важнейших требования к стреловым устройствам.
1. Стреловое устройство должно быть уравновешено относительно оси качания стрелы, что достигается с помощью подвижных противовесов.
2. Груз при изменении вылета должен перемещаться по траектории. мало отклоняющейся от горизонтали. Если груз движется по горизонтали, его потенциальная энергия не изменяется. Тогда при условии полного уравновешивания веса стрелового устройства мощность привода механизма изменения вылета затрачивается только на преодоление сил трения в шарнирах, давления ветра, горизонтальных сил при отклонении грузовых канатов от вертикали.
Анализируя известные типы стреловых устройств портальных кранов [11, 19], можно выделить следующие три принципа формирования их структуры и соответственно три способа обеспечении движения груза при изменении вылета по близкой к горизонтали траектории.
1. Прямые стрелы с переменной высотой подвеса груза (рис. 6.28, а; рис. 6.30; рис. 6.32; рис. 6.36). При уменьшении вылета одновременно с подъемом точки подвеса груз опускается на канатах относительно этой точки.
2. Шарнирно-сочлененные стрелы с постоянной высотой подвеса груза (рис. 6.28, б; рис. 6.38, а, б), представляющие собой шарнирный механизм, в котором точка подвеса груза при изменении вылета перемещается по траектории, незначительно отклоняющейся от горизонтали, а грузовые канаты движутся вдоль элементов стрелового устройства Траектория груза эквидистантна траектории точки подвеса груза.
3. Шарнирно-сочлененные стрелы с переменной высотой подвеса груза (рис. 6.28, в; рис. 6.38, в, г).
Для большинства стреловых устройств портальных кранов горизонтальная траектории груза принципиально может быть обеспечена лишь приближенно При движении груза по наклонной траектории вызываемые весом груза усилия, действующие на стрелу,

|
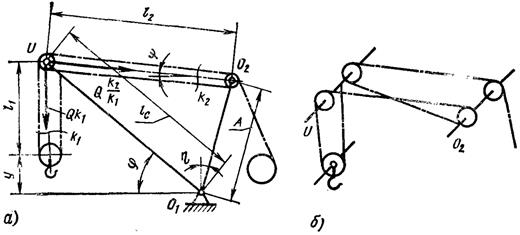
| Рис. 6.28. Схемы стреловых устройств: а ‑ прямая cтpeла; б ‑ сочлененная стрела с постоянной высотой подвеса; в ‑ сочлененная стрела с переменной высотой подвеса |
создают момент относительно оси ее качания, называемый грузовым неуравновешенным моментом. Во многих случаях эти усилия приводят к одной силе N в вершине стрелы (N1, N 2 или N 3 на рис. 6.28, а). Тогда грузовой неуравновешенный момент MQ равен произведению этой силы на ее плечо относительно оси качания стрелы, т. е. MQ =Nr. Момент MQ положителен, если действует в сторону увеличения вылета.
Если стреле придано малое угловое перемещение dφ, то ему соответствует малое перемещение груза по вертикали dy. Согласно принципу равенства работ Qdy=MQ d φ или
MQ=Q(dy/ d φ)= Q(dy/ dx)· a (φ), (6.25)
где a (φ) ‑ некоторая функция параметров схемы стрелового устройства и угла φ.
Таким образом, грузовой неуравновешенный момент пропорционален тангенсу угла, образуемого касательной к траектории груза с горизонтальной осью Оx.
На рис. 6.28, а и 6.29, а…в показаны траектории груза и соответствующие кривые грузового неуравновешенного момента. Экстремумам траектории соответствуют нулевые значения момента МQ а точкам перегиба траектории — экстремумы момента МQ. Если при уменьшении вылета происходит подъём груза, как это имеет место при переводе стрелы из положения U1 в положение U3 (рис. 6.28, а), то значения момента МQ положительны. Если же при уменьшении вылета груз опускается (движение от положения U 3 к положению U 2), то МQ<0. Следовательно, если при изменении вылета происходит подъем груза, то двигатель механизма изменения вылета должен преодолевать грузовой неуравновешенный момент.

|
| Рис. 6.29. Траектории груза у = f (х) и кривые грузового неуравновешенного момента MQ(х) |
Согласно ГОСТ 11283—72 отклонение траектории груза от горизонтали при изменении вылета для портальных кранов допустимо не свыше 15 % от диапазона ΔR изменения вылета. Стреловые устройства портальных кранов обеспечивают это отклонение в пределах (0,01…0.04) ΔR.
Схема прямой стрелы с уравнительным полиспастом показана на рис. 6.30, а. Грузовой канат (рис. 6.30, б), протянутый от барабана механизма подъема, образует уравнительный полиспаст кратностью k 2 между блоками О 2 на колонне крана и U на конце стрелы. Далее его направляют в грузовой полиспаст кратностью k 1 и закрепляют на стреле (при четных значениях k 1) или на подвеске (при нечетных значениях k 1). При изменении вылета, когда механизм подъема не работает, длины грузового l 1 и уравнительного l 2 полиспастов изменяются в противоположных направлениях, что позволяет обеспечить траекторию груза, близкую к горизонтальной прямой.
|
| Рис. 6.30. Схемы прямой стрелы с уравнительным полиспастом |
Рассмотрим зависимости между параметрами А, η, k 1 и k 2 (рис. 6.30, а), необходимые для обеспечения малого отклонения траектории груза от горизонтали [11]. Общая длина каната в грузовом и уравнительном полиспастах L= k 1 l 1+ k 2 l 2 откуда длина грузового полиспаста l 1= L /k1—l2k2/ k 1=Lk1— l 2 z 0, где z 0= k 2/ k 1. Из схемы на рис. 6.30, а ордината груза
y = lC sinφ- l 1= lC sinφ‑Lk1+ l 2 z 0. (6.26)
Из треугольника UO 1 O 2 длина уравнительного полиспаста  , где а=A/lC.
, где а=A/lC.
Подставив значение l 2 в уравнение (6.26). найдем
 (6.27)
(6.27)
Из этого выражения видно, что для прямых стрел с уравнительным полиспастом принципиально невозможно получить одно и то же значение у на всех вылетах (при любом угле φ), поскольку слагаемые в квадратных скобках изменяются в функции от φ по качественно различным законам. Возможно лишь приблизительное выполнение условия у=const.
Длину стрелы l C определяют в зависимости от наибольшего вылета и высоты расположения конца стрелы от оси ее качании на наибольшем вылете, указываемых в задании на проектирование. Oтнoшение кратностей z 0 рекомендуют принимать равным трем [11]. При меньших значениях z 0 невозможно получить удовлетворительную траекторию и кривую грузового неуравновешенного момента, а z 0>3 нецелесообразно принимать ввиду слишком большого усложнения стрелового устройства.
Таким образом, задача сводится к определению параметров А= аl C и η блока О2 (рис. 6.30, а). Решение задачи зависит от критерия, принимаемого при синтезе схемы стрелы. Если таким критерием считать отклонение Δу траектории груза от горизонтали, то минимум Δу достигается при равенстве ординат груза у1 и у2 соответственно на наибольшем и наименьшем вылетах [11]. Тогда на основании формулы (6.27)
 , (6.28)
, (6.28)
где «φ1 и φ2 ‑ значения угла φ наклона стрелы (рис. 6.30, а) на наибольшем и наименьшем вылетах.
Задаваясь значениями угла η можно найти значения а, решая уравнение (6.28) численно. Меньшее отклонение траектории Δу получается при меньших значениях угла η; поскольку отрицательные значения угла η неконструктивны (наклон колонны в сторону увеличения вылета), наилучшим является η=0 [11].
Для качественного анализа положим φ1 =0, φ2 = π/2, η=0. Тогда уравнение (6.28) примет вид  ,
,
откуда  .
.
Если z 0=1, то а=А/lС=0,75, если же z 0=3, то а=7/24. Таким образом, применение уравнительного полиспаста обеспечивает равные ординаты груза на граничных вылетах при значительно меньшей высоте колонны.
При определении параметров прямой стрелы целесообразнее исходить из характеристик грузового неуравновешенного момента. Если момент MQ во всем диапазоне изменения вылета имеет малые значения, то отклонение траектории груза от горизонтали незначительно; обратное утверждение не всегда справедливо. Подставляя в уравнение (6.25) значение у из формулы (6.27), получаем грузовой неуравновешенный момент
 .
.
Для синтеза схемы по рис. 6.30, а по двум значениям грузового неуравновешенного момента его выражение удобно записать в виде MQ = Ql C[cosφ‑ z 0sin(φ‑ψ)],
где ψ ‑ угол наклона оси уравнительного полиспаста.
Если на наибольшем вылете принять MQ = M 1, а на наименьшем вылете MQ = M 2 (рис. 6.28, а), то получим два уравнения:
M 1= Q · l C[cosφ1‑ z 0·sin(φ1‑ψ1)] и M 2= Q · l C[cosφ2‑ z 0·sin(φ2‑ψ2)],
по которым определяют граничные по вылету значения угловψ1 и ψ2. Соответствующее им положение оси О2 блоков уравнительного полиспаста на колонне находят графическим путем (рис. 6.31).

| Pиc. 6.31. Схемак определению координат блоков на колонне |
Представляет интерес прямая стрела с разнесенными блоками уравнительного полиспаста (рис. 6.32, а), у которой 2/3 блоков уравнительного полиспаста (при z 0=3) расположены на кронштейне (ось V 1), а 1/3 блоков — на конце стрелы (ось U1). Это позволяет обеспечить более конструктивную форму конца стрелы, что особенно важно для кранов большой грузоподъемности при большом числе ветвей в полиспастах. Грузовой неуравновешенный момент (рис. 6.32, б)
MQ = N 1 r 1‑ N 2 r 2, (6.29)
где V 1= Q cosψ/(k 1 cos λ); r1 = lC ·sin(λ—φ); N2=Q(k2— l)/k1; r2= E ·cosω+В·sinω.

|
| Рис. 6.32. Схема прямой стрелы с уравнительным полиспастом (а) и нагрузки на стрелу (б) |
Длина стрелы  . Между переменными по вылету углами ψ, λ, φ и ω. входящими в эти формулы, параметрамипрямой стрелы и независимой переменной 0≤ X ≤ΔR существуют следующие зависимости (см. рис. 6.32, б):
. Между переменными по вылету углами ψ, λ, φ и ω. входящими в эти формулы, параметрамипрямой стрелы и независимой переменной 0≤ X ≤ΔR существуют следующие зависимости (см. рис. 6.32, б):
tgψ=(l C·sinφ‑ E)/(R 1+ X + B); cosφ=(R 1+ X)/ l C;
tgλ=(k1+sinψ)/cosψ; l 'С=(l С‑ d)/cosδ1;
 .
.
Координаты оси O2 блоков для таких стрел в зависимости от характеристик грузового неуравновешенного момента можно определить, применяя ЭВМ. Рассмотрим кратко соответствующую методику синтеза, разработанную на кафедре ПТМ ЛПИ. Схема (см.рис. 6.32, а) описывается девятью параметрами, в качестве которых принимают диапазон ΔR изменения вылета, минимальный вылег R 1 от оси качания стрелы, высоту H конца стрелы над ее корнем на наибольшем вылете, координаты В и Е блоков на колонне, координаты c и d блоков на стреле, кратности k 1 и k2 полиспастов. Значения ΔR, R1, H, k 1 принимают исходя из задания на проектирование, минимальный вылет R1 назначают с учетом размещение груза под стрелой, а кратность k 1 грузового полиспаста — в зависимости от конструкции механизма подъема Далее задаются кратностью k2 уравнительного полиспаста (предпочтительное значение k2=3k1) и координатами c и d блоков на стреле (предпочтительны меньшие значения для снижения дополнительного нагружения стрелы изгибающим моментом). После этого остаются не определенными лишь значения параметров В и Е.
Допустим, что на граничных вылетах грузовой неуравновешенный момент имеет некоторые заданные значения, т. е. введем следующие ограничения соответственно для наибольшего и наименьшего вылетов (рис. 6.29, а):
МQ(X =ΔR)=M1; МQ(X =0)=M2. (6.30)
Возможность определения граничных вылетов относительно параметров В и Е следует из характера влияния изменения этих параметров (в отдельности при фиксированных остальных) на кривую (рис. 6.33, а, б; стрелками показано направление увеличения параметров). При построении алгоритма синтеза схемы на ЭВМ применим метод
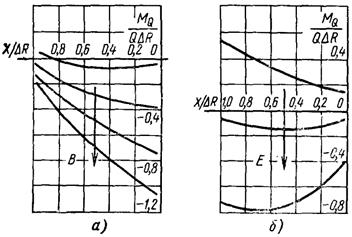
| Рис. 6.33. Влияние изменения параметров В (а) и Е (б) на кривуюнеуравновешенногогрузового момента |
Ньютона. При принятых начальных значениях В=В0 и Е=Е0 вычисляют граничные значения грузового неуравновешенного момента M 1.0(X =ΔR) и M 2.0(X =0) по формулам (6.29). В качестве значений параметров В0, и E 0 можно рекомендовать соответственно 0 и 0,5ΔR, которые близки к значениям этих параметров в конструкциях кранов. Затем определяют погрешности
Δ M 1= M 1‑ M 1.0; Δ M 2= M 2‑ M 2.0. (6.31)
Для устранения погрешностей Δ M 1 и Δ M 2 необходимо изменить начальные значения В 0 и Е0 соответственно на ΔВи Δ E, которые являются корнями системы уравнений метода Ньютона:
 (6.32)
(6.32)
Погрешности Δ M 1 и Δ M 2 вычисляют по выражениям (6.31). Частные производные в уравнениях (6.32) определяют численно на малом приращении параметров δВ и δE (например, при δВ=δЕ=0,01ΔR=δ ∂ M 1/∂ B =[ M 1(B +δ)‑M1(B)]/δ).
Решив уравнения (6.32), находят ΔВ и ΔЕ. Принимают В=В0+ΔВ, Е=Е0+ΔЕ и вновь вычисляют граничные значения момента МQ. Если эти значения не отличаются от заданных значений M 1 и M 2 более чем на допустимую погрешность, то процесс синтеза на этом заканчивают В противном случае процесс продолжают циклически до достижения заданных значений М 1 и М 2 с определенной точностью.
Оптимизация параметров прямых стрел. При различных значениях М 1 и М 2 можно получить множество вариантов схемы стрелы, из которых необходимо выбрать оптимальный. Решение задач оптимизации при проектировании конструкций включает следующие этапы.
1. Разработка системы параметров объекта, т. е. величин, задание значений которых достаточно для описания любого варианта, входящего в исследуемое множество.
Задачи оптимизации при проектировании подъемно-транспортных машин (ПТМ) обычно являются многопараметрическими. Систему параметров объекта можно составить различным образом, но в любом случае число параметров неизменно. Надо стремиться к тому, чтобы любой параметр мог принимать значения в широком диапазоне независимо от значений других параметров. Желательно, чтобы изменение каких-либо параметров существенно влияло на характеристики объекта.
2. Разработка системы критериев качества, характеризующих свойства объекта, и выбор одного из критериев в качестве важнейшего, называемого целевой функцией и характеризующего наиболее значимое свойство объекта.
Критерии качества могут быть заданы аналитическим выражением или алгоритмом определения. Так, при выборе варианта схемы (рис. 6.32, а) стрелы портального крана необходимо учитывать следующие показатели: геометрические (отклонение траектории груза от горизонтали), нагрузочные (значения грузового неуравновешенного момента), массовые (массу стрелового устройства), энергетические (затраты энергии при изменении вылета), стоимостные (стоимость изготовления), экономические (приведенные затраты на изготовление и эксплуатацию) и др.
Найти решение, оптимальное сразу по всем показателям, затруднительно. При постановке задачи за целевую функцию необходимо принять экономический критерий качества или такой технический показатель, который в условиях сравнения вариантов можно признать косвенным показателем экономического эффекта. Таким показателем при выборе схемы стрелового устройства может быть масса его металлической конструкции [10].
3. Разработка системы ограничений на числовые значения параметров и критериев качества, т. е. формирование множества вариантов, из которого находят оптимальное решение.
Ограничения математически выражают наложенные на объект связи и могут быть записаны в виде равенства (φ=0), неравенства (φ>0, φ<0) или нестрогого неравенства (φ≤0, φ≥0). Ограничения на параметры могут быть разрешимыми или неразрешимыми в явном виде относительно параметров. Ограничения, заданные явно, характеризуют область допустимых значений параметров; при этом желательно, чтобы из этих ограничений было определено как можно больше параметров. Примерами неявных ограничении являются условия совместности деформаций при оптимизации статически неопределимых систем, условия замкнутости при оптимизации шарнирных механизмов и т. п. Ограничения на критерии качества обычно задаются в виде неравенства и относятся к критериям, дополнительно учитываемым при оптимизации по целевой функции.
4. Разработка алгоритма оптимизации, позволяющего найти значения параметров, вызывающие экстремум целевой функции при выполнении ограничений.
В связи со сложностью инженерных задач оптимизации при проектировании, их решение в большинстве случаев можно получить в приемлемые сроки только на ЭBM.
Системa параметров вместе с системами ограничений и критериев качества образует математическую модель объекта оптимизации. Главным требованием, предъявляемым к такой модели, является адекватность, т. е. соответствие физическому аналогу.
При оптимизации параметров прямой стрелы за целевую функцию принимают массу m С металлической конструкции. Представив стрелу как оптимальную по массе коробчатую балку, получим
 ,
,
где ρ ‑ плотность материала; μ ‑ коэффициент, учитывающий отклонение от теоретической оптимальной формы, нерасчетные элементы и влияние продольных сил; F MIN ‑ минимально необходимая площадь сечение изгибаемой балки при выполнении ограничения по прочности φ= M / W —[σ]=0; M и W ‑ изгибающий момент и момент сопротивления сечения; [σ] ‑ допускаемое напряжение.
Сумму в этой формуле берут по числу участков эпюры изгибающих моментов.
Статическая схема прямой стрелы и эпюра изгибающих моментов, на которой через О Р обозначена точка присоединения к стреле тягового элемента механизма изменения вылета, приведены на рис. 6.34.
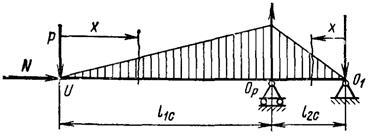
| Рис. 6.34. Схема нагружения стрелы и эпюра изгибающих моментов |
Известно [10], что площадь оптимального коробчатого сечения, нагруженного изгибающим моментом М:  , где δС ‑ толщина стенки сечения.
, где δС ‑ толщина стенки сечения.
Тогда масса консоли UOР  .
.
Изгибающий момент на участке между опорами И = Pxl\Jl%c- Для этого участка, состоящего из двух балок, вместо 6,. надо принять 26с. Тогда масса этого участка
 .
.
Масса всей стрелы
 . (6.33)
. (6.33)
В этих формулах конструктивный коэффициент μ≈1,7.
Наибольшая изгибающая нагрузка по сочетаниям нагрузок (табл. 6.1) для прямой стрелы с уравнительным полиспастом, изображенной на рис. 6.30, а,

| (сочетание II b 1); |
| (сочетание II b 2); |
где PQ = MQ/lC ‑ изгибающая нагрузка от грузового неуравновешенного момента; P α= Q · tg α II ·sin φ (рис. 6.32, б) ‑ изгибающая нагрузка, вызываемая отклонением грузовых канатов от вертикали на угол α II.
Проецируя силы Q и Qk 2/ k 1 (см. рис. 6.30, а) на ось перпендикулярную оси стрелы, получаем PQ=Q [sinψ‑ k 2·соs( φ —ψ)/ k 1].
Для каждого из сочетаний нагрузок II b 1 и II b 2 следует рассмотреть все значения вылета и установить, на каком вылете суммарная нагрузка имеет наибольшее абсолютное значение. Максимальное значение силы Р 1 обычно получают на минимальном вылете, а максимальное значение силы P 2 — на вылете X, приблизительно соответствующем минимальному значению грузового неуравновешенного момента.
Следует отметить, что в процессе оптимизации по целевой функции, определяемой по формуле (6.33), необходимо найти оптимальные значения параметров В и Е, при которых функции имеет минимум. Поскольку эти параметры определяют в зависимости от граничных значений М1 и М2 грузового неуравновешенного момента, задача сводится к оптимизации этих граничных значений. Анализ показывает. что для прямых стрел с уравнительным полиспастом (рис. 6.30) на наибольшем вылете следует принять М1=0. При М1<0 возрастают расчетные изгибающие нагрузки Р2 на всех вылетах, а значения M 1 >0 не удовлетворяют условиям уравновешивания стрелы с грузом. Таким образом, задача сводится к одномерной задаче определения оптимального значения момента М 2.
Рассмотрим три варианта схемы стрелы по рис 6.32, для которых кривые момента MQ даны на рис. 6.35, а. Графики нагрузки РQ для этих вариантов даны на рис. 6. 35, б, в. Нагрузка Pα от отклонения канатов от вертикали не зависит от момента и параметров В, Е. Графики изменения усилия Pα по вылету (отклонение канатов в сторону увеличения вылета, αII> 0) и суммарной нагрузки P 1= РQ +Pα для сочетания нагрузок IIb1, приведены на рис. 6.35, б. На кривых суммарной нагрузки нанесены точки, соответствующие наибольшему значению (на наименьшем вылете) этой нагрузки.
На рис. 6.35, в для сочетания нагрузок IIb2 построены графики усилий РQ и ‑Pα (отклонение канатов в сторону уменьшения вылета, αII<0), а также нагрузки P'2=РQ+ Pα. Эта сумма имеет наибольшее абсолютное значение (по вылету) у вылета, близкого к тому, который отвечает минимуму момента MQ.
На рис. 6.35, г приведены зависимости наибольших значений усилий Р1 и Р2 = |Р'2| от момента M 2. При уменьшении момента M 2, значение наибольшей нагрузки Р 1 (на минимальном вылете) уменьшается, а абсолютное значение нагрузки Р2 увеличивается. Оптимальным значением момента M 2, при котором масса стрелы минимальна, является такое значение, при котором Р1=Р2.
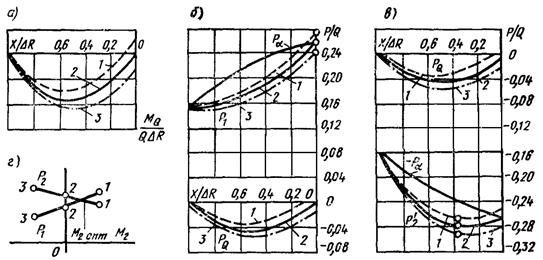 Рис. 6.35. Оптимизация нагружения прямой стрелы с уравнительным полиспастом
Рис. 6.35. Оптимизация нагружения прямой стрелы с уравнительным полиспастом
|
Следует отметить, что многие задачи проектирования оптимальных крановых конструкций сводятся к определению их параметров из условия равной нагруженности для двух наихудших расчетных сочетаний нагрузок (например, нахождение оптимального пролета мостового перегружателя [10]).
Подобный подход применим и к оптимизации прямых стрел с несовмещенными блоками (рис. 6.32). Однако здесь критерием нагруженности будет не наибольшая изгибающая нагрузка, а соответствующая ей минимальная масса, которую следует определять с помощью эпюры изгибающих моментов, соответствующей нагружению стрелы, приведенному на рис. 6.32. б.
В прямых стрелах с уравнительным блоком (рис. 6.36) грузовой канат протянут от блока с осью U стрелы к блоку с осью С, называемому уравнительным, и далее к барабану (ось О2) механизма подъема. Блок с осью С расположен на качающемся рычаге BO 2 C, соединенном со стрелой с помощью шарнирной тяги АВ При уменьшении вылета уменьшаются длины отрезков каната UС, СО3 и увеличивается длина l подвеса груза. Параметры схемы стрелы подбирают так, чтобы в трех положениях по вылету груз находился на одной горизонтали [15]. Грузовой неуравновешенный момент определяют по формуле МQ = Rr — Та, где R ‑ давление на блок с осью U 1 усилий Q и S в ветвях каната; Т ‑ усилие в тяге АB, вызываемое весом груза и определяемое из условия равновесия рычага BO 2 C: Т = Nb / c, причем N ‑ геометрическая сумма усилий S в ветвях каната на блоке с осью С.
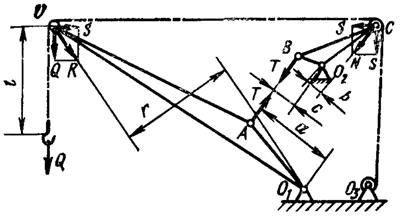
| Рис. 6.36. Схема прямой стрелы с уравнительным блоком |
По сравнению со стрелой с уравнительным полиспастом стрела с уравнительным блоком имеет более сложную конструкцию рычажной системы, но меньшее число блоков, общую длину и износ грузовых канатов.