Учитывая особую значимость данной проблемы, обратимся вновь к задаче стабилизации неустойчивого равновесия перевернутого маятника, воспользовавшись на этот раз для ее решения альтернативным подходом, основанным на использовании генетического программирования (ГП). Для иллюстрации основных положений этого подхода рассмотрим пример, приведенный в уже упоминавшейся книге Дж. Коза “ Генетическое программирование ” [29].
Будем полагать, что перевернутый маятник (рис.4.6), имеющий длину 2l и массу m, в данном случае установлен на тележке с массой М, которая может двигаться вправо или влево без трения под действием силы F.
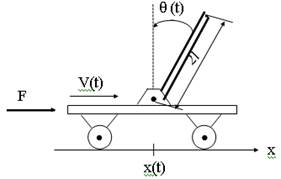
Рис.4.6. Конструкция перевернутого маятника
Требуется найти такой закон изменения силы F(t) во времени, который обеспечивал бы поддержание маятника в вертикальном положении (Θ= 0) путем придания тележке соответствующего ускорения в положительном или отрицательном направлении вдоль пути движения.
Рассматривая в качестве переменных состояния следующие координаты: x - положение тележки вдоль пути следования; V - скорость движения тележки; Θ- угол между осью маятника и вертикалью; ω- угловая скорость вращения маятника относительно точки крепления (шарнира), можно записать уравнения динамики системы “тележка - маятник” в виде
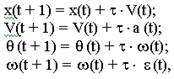
где a (t) - ускорение тележки относительно пути движения в момент времени t
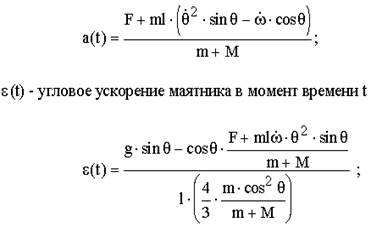
t- дискретное время, принимающее значения 0, 1, 2,....
В данном примере: m = 0,1 кг; l = 0,8106 м; M= 0,9 кг; g = 10 м/с2; τ= 0,02 с.
Допустим, что решение задачи управления должно удовлетворять следующим трем условиям:
1) управляющее воздействие F(t) представляет собой кусочно-постоянную функцию, принимающую значения +Fmили - Fmв любой момент времени t, в зависимости от конкретных значений переменных состояния;
2) управление F(t) должно переводить систему из любого начального состояния в конечное состояние покоя, соответствующее скорости V = 0, угловому положению Θ= 0 и угловой скорости ω= 0;
3) время достижения требуемого конечного состояния должно быть минимальным.
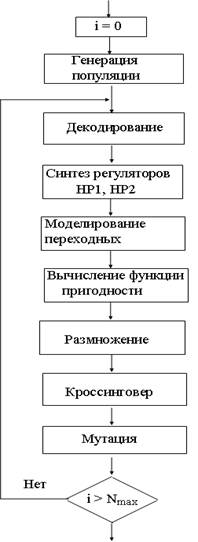
Рис. 4.4. Блок-схема процедуры синтеза с помощью ГА
Отметим, что задачи управления неустойчивым динамическим объектом в последние годы привлекают все более широкое внимание специалистов различных отраслей. Так, экспериментальные варианты гиперзвуковых истребителей Х-29 фирмыGrummanAircraftCorporation с крылом обратной стреловидности, Х-31 фирмыRockwellInternarional, беспилотного самолета Х-36 корпорации McDonnelDouglas(США), а также серийно выпускаемые отечественные истребители СУ-27, СУ-30, СУ-34, СУ-35, СУ-37 относятся к классу неустойчивых летательных аппаратов, которые никогда не смогли бы держаться в воздухе без помощи компьютерной системы управления полетом. Принятие данной концепции проектирования летательных аппаратов, известной под названием “управляемой неустойчивости” или “электронной устойчивости”, позволяет самолету иметь исключительно высокие маневренные характеристики и выполнять эволюции, недоступные обычному истребителю (например, летать с углом атаки 700 или хвостом вперед). Поэтому рассмотренный выше пример построения системы управления неустойчивым объектом с помощью ГА представляет собой несомненный интерес в методическом отношении.
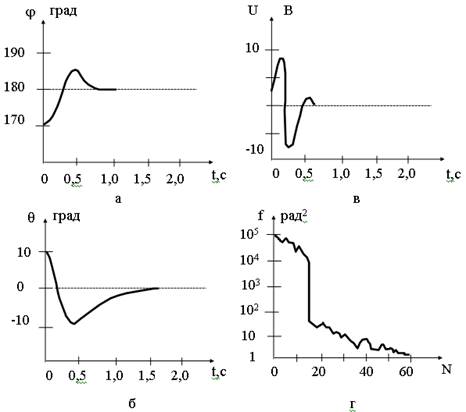
Рис.4.5. Переходные процессы в САУ и функция пригодности