УЧЕБНЫЕ ЗАДАНИЯ с элементами
Дистанционных образовательных технологий
Для группы МЦМ-19-2, 05.11.21
1. 9час. 30 мин. – 11 час. 05мин. – АТП, лекция – Определение динамических характеристик объекта управления по его кривой разгона.
Материал лекции представлен ниже.
Технология выполнения задания: составить письменный конспект по указанной теме.
После выполнения задания студенту необходимо составить письменный конспект. Конспект записывается в лекционную тетрадь.
2. 11час. 25 мин. – 12 час. 55мин. – МЦМ, лекция – Производство магния.
Материал лекции представлен в учебнике, в папке МЦМ.
Технология выполнения задания: составить письменный конспект по указанной теме, материал раскрыть согласно следующему плану:
1.1Свойства, применение магния – стр.362.
1.2 Сырье для получения магния – стр.364.
1.3 Получение хлоридов – стр.366,367.
1.4 Электролиз хлоридов – стр.374.
После выполнения задания студенту необходимо составить письменный конспект. Конспект записывается в лекционную тетрадь.
Лекция: Определение динамических характеристик объекта управления по его кривой разгона
При определении динамических характеристик объекта по его кривой разгона на вход подается или ступенчатый пробный сигнал или прямоугольный импульс. Во втором случае кривая отклика должна быть достроена до соответствующей кривой разгона.
При снятии кривой разгона необходимо выполнить ряд условий:
1. Если проектируется система стабилизации, то кривая разгона должна сниматься в окрестности рабочей точки процесса.
2. Кривые разгона необходимо снимать как при положительных, так и отрицательных скачках управляющего сигнала. По виду кривых можно судить о степени асимметрии объекта. При небольшой асимметрии расчет настроек регулятора рекомендуется вести по усредненным значениям параметров передаточных функций. Линейная асимметрия наиболее часто проявляется в тепловых объектах управления.
|
|
3. При наличии зашумленного выхода желательно снимать несколько кривых разгона с их последующим наложением друг на друга и получением усредненной кривой.
4. При снятии кривой разгона необходимо выбирать наиболее стабильные режимы процесса, например, ночные смены, когда действие внешних случайных возмущений маловероятно.
5. При снятии кривой разгона амплитуда пробного входного сигнала должна быть, с одной стороны, достаточно большой, чтобы четко выделялась кривая разгона на фоне шумов, а, с другой стороны, она должна быть достаточно малой, чтобы не нарушать нормального хода технологического процесса.
Сняв кривую разгона, и оценив характер объекта управления (с самовыравниванием или без) можно определить параметры соответствующей передаточной функции. Передаточную функцию вида (1.5) рекомендуется применять для объектов управления с явно выраженной доминирующей постоянной времени (одноемкостный объект). Перед началом обработки кривую разгона рекомендуется пронормировать (диапазон изменения нормированной кривой 0 - 1) и выделить из ее начального участка величину чистого временного запаздывания.
Пример. Дана нормированная кривая разгона объекта, у которой заранее выделена величина чистого запаздывания  . Построим график кривой разгона (рис. 1.4) по ее значениям, приведенным в таблице 1.1.
. Построим график кривой разгона (рис. 1.4) по ее значениям, приведенным в таблице 1.1.
|
|
Таблица 1.1.

|

|

| 0,087 | 0,255 | 0,43 | 0,58 | 0,7 | 0,78 | 0,84 | 0,92 | 0,96 |
Рис. 1.4. График кривой разгона
Динамический коэффициент усиления  объекта определяется как отношение приращения выходного сигнала к приращению входного в окрестности рабочей точки.
объекта определяется как отношение приращения выходного сигнала к приращению входного в окрестности рабочей точки.
Определение динамических характеристик объектов по кривой разгона можно производить двумя методами.
1) Метод касательной к точке перегиба кривой разгона.
В данном случае точка перегиба соответствует переходу кривой от режима ускорения к режиму замедления темпа нарастания выходного сигнала. Постоянная времени Т и динамическое запаздывание  определяются в соответствии с графиком рис.1.4, т.е.
определяются в соответствии с графиком рис.1.4, т.е.  .
.
2) Формульный метод позволяет аналитически вычислить величину динамического запаздывания и постоянной времени по формулам
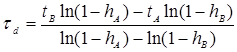 ,
,  .,
.,
где значение  ,берется в окрестности точки перегиба кривой, а значение
,берется в окрестности точки перегиба кривой, а значение  принимается равным 0,8 - 0,85. По этим значениям определяются и моменты времени
принимается равным 0,8 - 0,85. По этим значениям определяются и моменты времени  и
и  .
.
Методику определения параметров динамической модели (1.6) объекта без самовыравнивания рассмотрим на примере кривой разгона уровня в барабане котла теплоагрегата. Предполагается, что на вход объекта увеличили подачу воды на 10 т/час =DG, при этом уровень начал увеличиваться. Приращение уровня зафиксировано в таблице 1.2.
Таблица 1.2.

| ||||

|
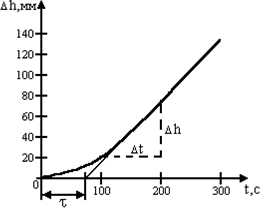 Рис.1.5. График разгонной
характеристики объекта без
самовыравнивания
Рис.1.5. График разгонной
характеристики объекта без
самовыравнивания
|
График разгонной характеристики объекта без самовыравнивания, построенной в соответствии с приведенной таблицей показан на рис. 1.5.
|
|
Для объекта без само-выравнивания коэффициент усиления определяется как отношение установившейся скорости изменения выходной величины к величине скачка входного сигнала. В нашем примере
 ,
,  .
.
Величина динамического запаздывания  в объекте определяется так, как показано на рис.1.5.
в объекте определяется так, как показано на рис.1.5.