Регулирование координат электропривода с асинхронным двигателем
Регулирование координат электропривода с асинхронным двигателем изменением напряжения
Изменение величины напряжения, подводимого к статору АД, позволяет осуществлять в статических и динамических режимах регулирование его координат с хорошими показателями и с помощью относительно простых схем управления. Этот же способ может быть использован и для обеспечения наиболее экономичных режимов работы АД.
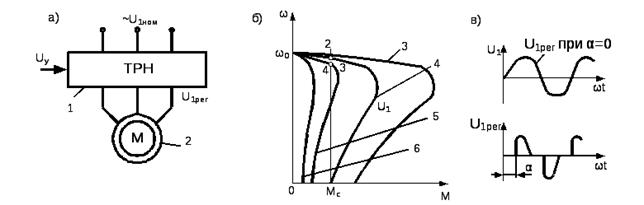
Для регулирования координат короткозамкнутого АД между сетью переменного тока со стандартным напряжением U1ном и статором (рис. 8.20а) двигателя 2 включен тиристорный регулятор 1 напряжения (ТРН), выходное напряжение которого U1рег изменяется с помощью маломощного внешнего сигнала управления Uу.
Изменяя величину этого сигнала, можно регулировать напряжение на статоре двигателя U1рег в пределах от величины сетевого напряжения U1ном и практически до нуля.
Регулирование напряжения на статоре не приводит к изменению скорости холостого хода  и не влияет на критическое скольжение Sк, но существенно изменяет величину критического (максимального) момента Мк..
и не влияет на критическое скольжение Sк, но существенно изменяет величину критического (максимального) момента Мк..
В результате при U1рег = var искусственные характеристики (рис. 8.20б) оказываются малопригодными для целей регулирования скорости, так как по мере уменьшения напряжения резко снижается критический момент АД и тем самым его перегрузочная способность, а диапазон регулирования скорости очень мал.
а) б) в)
Рис. 8.20. Схема регулирования координат АД изменением напряжения на статоре (а), механические характеристики (б) и кривые напряжения (в)
Характеристики 3–6 построены при напряжениях 1; 0,8; 0,6 и 0,4 U1ном. По указанным причинам разомкнутая схема используется лишь для воздействия в переходных процессах на момент АД, что может требоваться, напомним, для обеспечения заданных ускорения движения ЭП или регулирования натяжения на исполнительном органе рабочей машины.
|
|
Диапазон напряжения скорости можно увеличить лишь в замкнутых электроприводах.
Регулятор напряжения позволяет также осуществлять регулирование (ограничение) в переходных режимах тока АД.
При подаче на тиристоры ТРН импульсов управления с углом управления  они будут полностью открыты, и к АД будет приложено все напряжение сетиU1 = Uрег (рис. 8.20 в). Если осуществлять подачу импульсов на тиристоры с некоторой задержкой относительно предельного режима (угол управления
они будут полностью открыты, и к АД будет приложено все напряжение сетиU1 = Uрег (рис. 8.20 в). Если осуществлять подачу импульсов на тиристоры с некоторой задержкой относительно предельного режима (угол управления  ), то к АД будет прикладываться часть напряжения сети, как показано для фазы А (рис. 8.20 в). Изменяя угол управления
), то к АД будет прикладываться часть напряжения сети, как показано для фазы А (рис. 8.20 в). Изменяя угол управления  от нуля до
от нуля до  , можно регулировать напряжение на АД от полного напряжения сети до нуля.
, можно регулировать напряжение на АД от полного напряжения сети до нуля.
Существенно отметить, что форма напряжения на статоре АД является несинусоидальной. Несинусоидальное напряжение можно представить, как совокупность нескольких синусоидальных напряжений – гармоник, каждая из которых изменяется с определенной частотой. Частота изменения первой из них (основной гармоники) равна частоте питающего напряжения, а частота других гармоник больше чем первой. Обычно 1-я гармоника имеет наибольшую амплитуду и по ней ведутся все основные расчеты.
С помощью ТРН можно обеспечивать принудительное электрическое торможение АД, формирование требуемых динамических характеристик ЭП в переходных режимах, обеспечение наиболее экономичных режимов АД при его работе с переменной нагрузкой и изменение направления скорости АД.