Задание на 16.10.2021
Тело, которое может совершать любые перемещения в пространстве, называется свободным, примером свободного тела может служить самолет или снаряд, летящие в воздухе. В различного рода сооружениях и конструкциях мы обычно встречаемся с телами, на перемещения которых наложены ограничения. Такие тела называются несвободными. Тело, ограничивающее свободу движения твердого тела, является по отношению к нему связью. Если приложенные к телу силы будут стремиться сдвинуть его по тому или иному направлению, а связь препятствует такому перемещению, то тело будет воздействовать на связь с силой давления на связь.
По аксиоме 4 статики связь будет действовать на тело с такой же силой, но противоположно направленной. Сила, с которой данная связь действует на тело, препятствуя тому или иному перемещению, называется силой реакции связи.
Из изложенного следует принцип освобождаемости твердого тела от связи, или аксиома связи: всякое несвободное тело (рис. 1, а) можно рассматривать как свободное, если мысленно отбросить наложенные на тело связи и приложить вместо них силы реакции этих связей (рис. 1, б). На рис. 1 mg — вес тела, N — реакция связей.
Силы, действующие на тела, будем разделять на заданные, или активные силы, и реакции связей, или пассивные силы.
Модуль и направление каждой активной силы известны заранее и не зависят от действия других приложенных к данному телу сил. Примерами активных сил могут служить мускульная сила человека, сила тяжести, сила сжатой пружины.
Реакции связи на покоящееся тело возникают лишь в тех случаях, когда это тело под действием активных сил оказывает давление на связь, поэтому они и называются пассивными силами. По аксиоме связи реакция связи направлена в сторону, противоположную той, куда связь не дает перемещаться телу. Следовательно, если известно, в каком направлении связь препятствует перемещению твердого тела, то известно и направление реакции связи.
Рассмотрим наиболее часто встречающиеся типы связей.
1. Гладкая поверхность или плоскость
Гладкой будем называть такую поверхность, на которой в первом приближении можно пренебречь трением. Связь в виде гладкой поверхности не дает телу перемещаться только в одном направлении — перпендикулярном к этой поверхности. Поэтому реакция гладкой поверхности N направлена по нормали к этой поверхности и приложена к телу в точке касания (см. рис. 1, б). На рис. 1, б тело изображено освобожденным от связи.
В дальнейшем при рассмотрении равновесия несвободного тела реакцию связи будем изображать так, как показано на рис. 2. На этом рисунке приведены связи в виде гладких выпуклой (рис. 2, а) и вогнутой (рис. 2, в) поверхностей, а на рис. 2, б — в виде плоской гладкой поверхности.
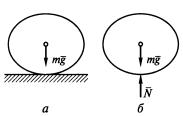
Рисунок 1
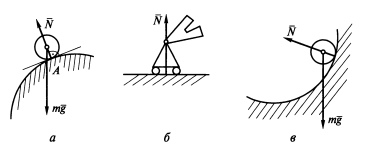
Рисунок 2
2. Гладкая опора.
Связь, осуществленная в виде гладкой опоры, не дает телу перемещаться в направлении, перпендикулярном к поверхности тела в точке опоры (рис. 3). Видно, что реакция гладкой опоры направлена по нормали к опирающейся поверхности и приложена к телу в точках касания А и В.
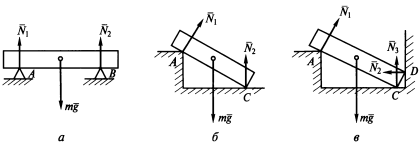
Рисунок 3
3. Нить.
Связь, осуществляемая в виде гибкой нити (рис. 4), не позволяет телу удаляться от точки А, поэтому реакция связи Т всегда направлена вдоль нити к точке ее закрепления.
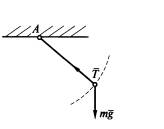
Рисунок 4
4. Цилиндрический шарнир.
На рис. 5 изображена шарнирно-неподвижная опора вала, ось которого проходит через шарнир А перпендикулярно к плоскости чертежа. Цилиндрический шарнир А допускает вращение вала, но препятствует его перемещению в плоскости хОу. Поэтому реакция цилиндрического шарнира R расположена в плоскости, перпендикулярной оси возможного вращения, и ее направление определяют две взаимноперпендикулярные проекции на оси Ох и Оу.
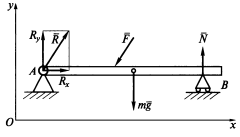
Рисунок 5
5. Невесомый стержень.
Жесткий невесомый (массой его пренебрегают) стержень, шарнирно прикрепленный к телу (рис. 6, а), испытывает действие только двух сил, приложенных в шарнирах А и В (рис. 6, б). Как и вся конструкция, стержень АВ находится в равновесии. Если стержень находится в равновесии под действием двух сил, то в соответствии с аксиомой 1 статики эти силы должны быть равны по модулю, но противоположно направлены по одной линии действия, т.е. R1 = -R2, а их модули Rt = R2 = R. В отличие от нити стержень может действовать на тело в двух направлениях, испытывая либо сжатие (см. рис. 6, б), либо растяжение.
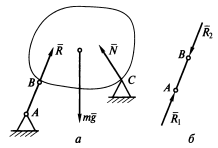
Рисунок 6
6. Жесткая заделка.
Заделка (рис. 7) исключает возможность любых перемещений вдоль осей Ох и Оу, а также поворот в плоскости хОу. Поэтому такая связь при освобождении тела от связи будет заменяться реакцией R (или ее проекциями Rx и Ry и моментом в заделке МА).
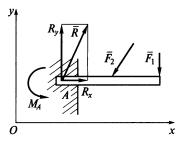
Рисунок 7
Задание.
1. В рабочую тетрадь записать все основные понятия в виде таблицы. Пример заполнения таблицы представлен ниже.
2. Ответить на вопросы для самоконтроля письменно
Вопросы для самоконтроля.
1. В чем заключается отличие активных сил от пассивных?
2. Приведите примеры к рисунку 2 а, б, в.