ГЛАВА 4. СТРУКТУРНО-ИНФОРМАЦИОННЫЙ АНАЛИЗ
СИСТЕМ ЧПУ РАЗЛИЧНЫХ КЛАССОВ
Позиционные системы ЧПУ
Позиционные системы ЧПУ объединяют большую группу устройств, служащих для управления с высокой точностью установочными перемещениями рабочих органов автоматизированных станков сверлильно-расточной группы и промышленных роботов. При позиционировании рабочий орган станка перемещается из одной заданной точки в другую по произвольной траектории за кратчайшее время. Все перемещения задаются в абсолютной системе координат, имеющей фиксированное начало отсчета; число управляемых координат не более пяти; число одновременно управляемых координат не более двух; рабочая подача производится по одной координате.
Позиционные системы ЧПУ строят по агрегатному принципу, что дает возможность на единой функциональной, схемной и конструктивной основе выпускать различные УЧПУ с заданным набором функций, необходимых для управления конкретным объектом. Это позволяет более полно использовать заложенные функциональные возможности в УЧПУ и исключить узлы, функции которых при управлении данным объектом не используются.
Структурная схема позиционной системы ЧПУ включает в себя следующие блоки (рис. 4.1).
Фотосчитывающее устройство (ФСУ)служит для ввода УП с программоносителя (перфоленты).
Пульт ввода (ПВ) предназначен для ввода УП с клавиатуры, назначения режимов работы, подачи разовых команд и индикации контроля состояния системы ЧПУ.
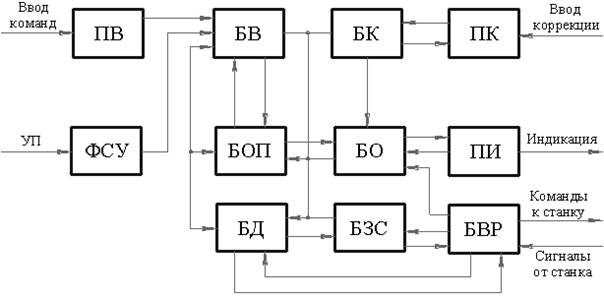
Рис. 4.1. Структурная схема позиционной системы ЧПУ
Блок ввода (БВ)служит для выбора режима ввода, вызовов автоматических циклов по команде G80cвстраиванием в циклы фактических параметров, управлением лентопротяжным механизмом в старт-стопном режиме во время отработки УП и управлением перемоткой ленты в начало программы, расшифровки адресов команд, временного хранения и ввода в соответствующие регистры памяти содержимого команд по расшифрованному адресу.
Пульт коррекции (ПК)служит для набора и хранения корректирующей информации по заданным адресам.
Блок коррекции (БК)обеспечивает последовательное считывание и ввод информации с нормализацией по запросам в соответствующие адреса инструментов или координат в УП.
Пульт индикации (ПИ)предназначен для индикации информации по задействованным адресам (построчно или по страницам). Он представляет собой электронно-лучевую трубку, в левой части которой растровые строки индицируют действительное положение рабочих органов оборудования, а в правой части – заданные значения в УП.
Блок задания скорости (БЗС) обеспечивает управление скоростями по действующим координатам, управление торможением и выбором направления движения.
Блок оперативной памяти (БОП)содержит память для хранения вводимой информации и информации результатов вычислений во время отработки, а также ПЗУ для хранения состава автоматических циклов с адресами G81- G89.
Блок обслуживания (БО)выполнен в виде специализированного микропроцессора, который выполняет обработку геометрической информации – вычисление угла рассогласования по всем управляемым координатам с использованием пяти аргументов, которые могут влиять на расчеты угла рассогласования (заданное значение перемещения по координате, действительное положение рабочего органа станка по координате, коррекция режущего инструмента, коррекция положения рабочего органа и вторичное или третичное смещение по данной координате).
Вычисленное значение угла рассогласования в каждом цикле сравнивается с заданными установками (числами) для выбора соответствующей скорости движения (ускоренный ход, одна из скоростей, торможение). Кроме того, данное устройство формирует тактовые сигналы для синхронизации работы всех блоков системы ЧПУ (выполняет функции таймера), обеспечивает управление пультом индикации.
Блок датчиков (БД)предназначен для преобразования и усиления сигналов датчиков положения в код УЧПУ.
Блок внешних разъемов (БВР)представляет собой микроконтроллер, который обеспечивает связь УЧПУ с электроавтоматикой станка, и служит для расшифровки, формирования и распределения сигналов управления группы SMT на соответствующие исполнительные механизмы, а также для формирования сигналов индикации состояния рабочих органов станка и сигналов готовности.
4.1.1 Блок оперативной памяти
Блок оперативной памяти в УЧПУ предназначен для хранения содержимого отдельного кадра УП. Информация кадра, поступающая из блока ввода при считывании УП с программоносителя или при вводе с клавиатуры, распределяется по соответствующим регистрам с индексацией их содержимого на пульте индикации. Запись кадра УП осуществляется адресным способом согласно расположению команд в кадре (формату кадра).
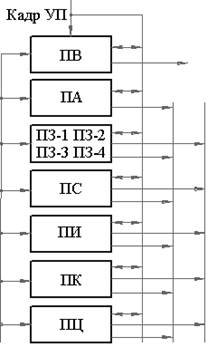
Рис. 4.2. Структурная схема блока оперативной памяти
Блок оперативной памяти позиционной системы ЧПУ (рис. 4.2) включает в себя следующие блоки памяти.
Память ввода (ПВ) – представляет собой регистр адреса с дешифратором адресов и предназначена для хранения адресов, поступающих команд и их расшифровку. По сформированным сигналам расшифрованного адреса производится распределение содержимого команд по соответствующим адресным регистрам узла памяти.
Память адреса (ПА)предназначена для хранения адреса команды, который используется в шифраторе слова для контроля команд на длину слова (контроль правильности вводимой информации).
Память задания (ПЗ) состоит из нескольких блоков регистров, в которых хранятся различные данные: ПЗ-1 – память задания размерных перемещений по координатам первого канала; ПЗ-2 – память задания размерных перемещений по координатам второго канала; ПЗ-3 и ПЗ-4 – память задания размерных перемещений в автоматических циклах.
Память скоростей (ПС)служит для хранения информации управления скоростями по адресам F и S (значения скорости подачи и установочных перемещений, режим разгона торможения, условия позиционирования в конце движения, значение угловой скорости шпинделя и т. д.).
Память инструмента (ПИ)хранит номера инструментов в шпинделе и в носителе, заданные управляющей программой.
Память команд (ПК)предназначена для хранения технологических команд группы М.
Память циклов (ПЦ)хранит содержимое автоматических циклов, в которые встраиваются фактические параметры цикла, считываемые из ПЗ-3, ПЗ-4 (сведения из УП).
4.1.2 Блок автоматических циклов
Автоматические циклы упаковываются и формируются для исполнения в специальном блоке автоматических циклов (рис. 4.3), который представляет собой программный автомат, формирующий набор команд исполнения автоматического цикла. Содержание цикла, упакованное совместно с параметрами, выдается по тактам на станок с подтверждением исполнения для запуска очередного такта.
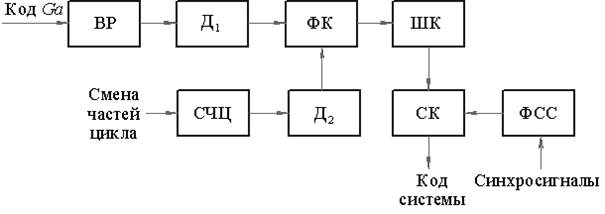
Рис. 4.3. Структурная схема блока автоматических циклов
Во многих металлообрабатывающих станках, в том числе сверлильно-расточной группы, обработка включает в себя стандартные группы действий. Для упрощения программирования и сокращения объема УП в программу можно встраивать стандартные циклы как составные части УП технологического процесса с заменой в данных циклах формальных параметров на фактические, действующие в данной УП. Таким образом, стандартные циклы являются как бы стандартной подпрограммой с формальными параметрами.
Блок автоматических циклов работает следующим образом. Заголовок цикла Ga по команде ввода записывается во входной регистр (ВР). Содержимое номера цикла расшифровывается матричным дешифратором (Д1).Набор сформированных сигналов подается дешифратором на формирователь команд (ФК).Одновременно счетчик частей циклов (СЧЦ),фиксируя номер такта исполняемого цикла, формирует сигналы посредством дешифратора (Д2).Эти сигналы совместно с сигналами Д1формируют команды в такте формирователем команд. Сформированные команды подаются на шифратор команд (ШК).Он расшифровывает команды, подает их на схему коммутации (СК),которая, в свою очередь, с помощью формирователя сигналов считывания (ФСС)считывает с коммутатора определенную группу команд и выдает их на шины системы для отработки соответствующими рабочими органами станка.
После исполнения данной части цикла (сигнал подтверждения) на блок автоматических циклов выдается сигнал смены части цикла; счетчик частей циклов, записав новую часть цикла, организует новую группу команд (при заявке на прерывание часть цикла задерживается на исполнение до прихода команд прекращения прерывания).
Для удобства программирования и обращения к циклу, как к стандартной подпрограмме, все циклы имеют общий заголовок G80, который является командой обращения к стандартному циклу. Все стандартные циклы имеют стандартный набор тактов (действий), которые могут разрываться различными прерываниями по запросам (запрос на прерывание с пульта оператора, прерывание по запросу УП, прерывание по запрету).
4.1.3 Блок задания скорости
Блок задания скорости позиционной системы ЧПУ (рис. 4.4)служит для формирования сигналов управления приводами подач (два канала управления), главным приводом, приводом магазина инструментов и приводами вспомогательных механизмов.
В состав блока задания скорости входят следующие блоки.
Блок адреса (БА)предназначен для формирования установок пути торможения по управляемым координатам, управления установочными перемещениями, запоминания кода адресов выбранных координат по двум каналам управления, запоминания кода команд G60...G69(режим позиционирования), кода технологических команд группы М и формирования сигналов общей готовности.

Рис. 4.4. Структурная схема блока задания скорости
Блок торможения (БТ) формирует ступень скоростей торможения F 1 ...F 4,выбирает закон торможения согласно команде G60,формирует и выдает сигнал адреса координат, направления движения, вырабатывает сигнал готовности.
Блок подачи (БП)формирует установку скоростей подач по двум каналам управления, выдает в привод станка код скоростей подачи.
Блок скоростей главного привода (БСГП)служит для формирования кодового задания скорости главного привода, для управления электрическими и механическими ступенями.
Блок управления скоростью магазина инструмента (БУСМИ)предназначен для управления скоростью перемещения магазина инструмента и скоростью позиционирования в рабочем положении.
Блоки-усилители (БУ-1...БУ-4)служат для формирования сигналов управления приводами станка.
Управление скоростью позиционирования по управляемым координатам выполняются согласно рассчитанному углу рассогласования по команде G60и выставленным уставкам пути торможения (станочные константы). Путевые уставки Y 1, Y 2, Y 3, Y 4 (кодовые числа, соответствующие участкам торможения, – станочные константы) выбираются как параметры, исходя из динамических характеристик узлов оборудования по управляемым координатам. Значения установок могут быть выбраны перестановкой перемычек при наладке. Это позволяет в производственных условиях проверить позиционирования рабочих органов станка, их время торможения, наличие автоколебаний в точке позиционирования, а также выбрать новые значения установок пути торможения.
Контурные системы ЧПУ
В контурных системах ЧПУ обеспечение перемещений рабочих органов станка производится по заданной, в общем случае криволинейной, траектории с одновременным управлением их скоростью во время движения, что обусловливает формирование геометрических параметров детали.
Вследствие этого контурные системы ЧПУ по своей функциональной структуре идентичны, различие состоит лишь в числе управляемых координат, способе расчета траектории движения инструмента, типах приводов и способах ввода и хранения УП.
На рис. 4.5 показана структурная схема контурной системы ЧПУ.
Пульт управления и индикации (ПУИ)предназначен для пуска и останова станка, выбора режимов работы, задания команд вручную, получения информации о положении рабочих органов станка и работе системы ЧПУ, коррекции положения рабочих органов станка и положения инструмента по всем координатам, причинах прерывания исполнения УП.
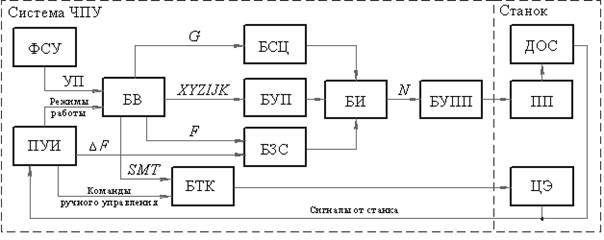 Рис.4.5. Структурная схема контурной системы ЧПУ
Рис.4.5. Структурная схема контурной системы ЧПУ
Фотосчитывающее устройство (ФСУ)служит для ввода УП с программоносителя (перфоленты).
Блок ввода (БВ) предназначен для расшифровки адресов команд, хранения и передачи содержимого команд по соответствующим адресам, а также для контроля вводимой информации по паритету и длине слова.
Блок технологических команд (БТК)обеспечивает управление цикловой электроавтоматикой (ЦЭ) станка по командам SMT.
Блок управления преобразованием (БУП)служит для преобразования двоично-десятичного кода с программоносителя в двоичный код.
Блок стандартных циклов (БСЦ) используется для облегчения программирования и сокращения длины программоносителя при позиционной обработке повторяющихся элементов заготовки, например, при сверлении и растачивании отверстий, нарезании резьбы.
Блок задания скорости (БЗС)обеспечивает заданную скорость перемещения рабочих органов станка согласно запрограммированному значению скорости подачи по адресу F, коррекцию скорости подачи при ручном управлении, режим разгона и торможения рабочих органов станка.
Блок интерполяции (БИ) –это специализированный процессор, предназначенный для расчета траектории движения рабочих органов станка методом линейно-круговой интерполяции и выдачи управляющих импульсов на управляемые координаты для обеспечения движения по расчетной траектории с заданными значениями перемещений.
Блок управления приводами подач (БУПП) управляет приводами подач (ПП) по задействованным координатам в системе ЧПУ. В СЧПУ с шаговым приводом данный блок обеспечивает выход рабочих органов станка в фиксированные точки по сигналам датчиков обратной связи (ДОС).
4.2.1 Пульт управления и индикации
На рис. 4.6 показан пульт управления и индикации с оперативными органами управления.
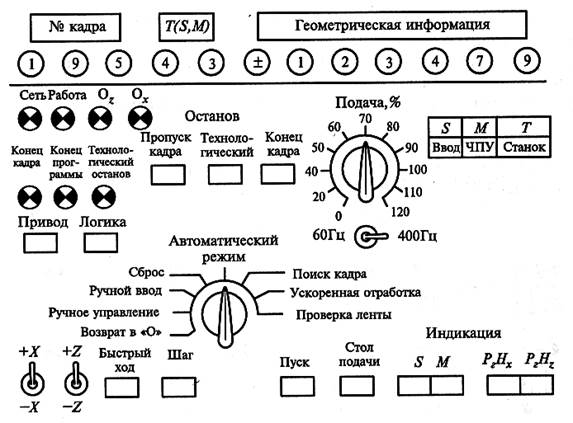
Рис. 4.6. Пульт управления и индикации
Он содержит следующие индикаторы:
1. Номера кадра (N) –обеспечивает индикацию номера кадра, к которому идет обращение;
2. Номеров технологических команд – выполняет индикацию номера технологической команды, к которой идет обращение (Т –адрес индицируется в естественной форме, MS –адреса индицируются по заявкам с помощью клавиш принудительной индикации MS);
3. Геометрической информации в естественной форме – индицирует приращения перемещений, вводимые в кадре (Δ х, Δ z), и в принудительной форме посредством клавиш РгН х, РгНz, индицирующих текущее значение координат в абсолютной системе отсчета;
4. Сигнальные лампы нормальной работы системы «Сеть», «Работа», «O x, «О z »;
5. Сигнальные лампы причин прерывания «Конец кадра», «Конец программы», «Технологический останов»;
6. Транспаранты SMT,индицирующие исполнение технологических команд данной группы;
7. Транспаранты причины и места сбоев «Ввод», «ЧПУ», «Станок».
На пульте имеются органы оперативного управления. Переключатель режимов работы назначает следующие режимы работы: «Проверка ленты»; «Ускоренная отработка»; «Поиск кадра»; «Сброс»; «Ручной ввод»; «Возврат в «О»; «Ручное управление»; «Автоматический режим», предназначенный для выполнения УП в автоматическом режиме и отработки УП в следующих подрежимах: «Останов в конце кадра», т. е. прерывание отработки после исполнения каждого кадра; «Технологический останов», который выполняет прерывание УП по заявкам (команды М00, М01); «Пропуск кадра» — подрежим, в котором осуществляется пропуск без отработки всех кадров, помеченных знаком «/». Переключатель «Подача,%» служит для корректировки скорости подачи.
4.2.2 Блок ввода
Блок ввода (рис. 4.7) состоит из нескольких функциональных блоков.

Рис. 4.7. Структурная схема блока ввода
1. Фотосчитывающее устройство (ФСУ)осуществляет считывание УП с перфоленты и ввод информации в регистр ФСУ, атакже управление лентопротяжным механизмом.
2. Блок регистров ввода (БРВ)служит для записи вводимой команды в пределах одной строки и проверки ее на четность.
3. Блок регистров преобразования (БРПР)выполняет построчный прием команд для переписи параллельного кода. Он также преобразует двоично-десятичный код в двоичный для записи его по адресам X, Y, Z, I, J, К,т. е. по адресам устройств, которые работают по принципу процессора.
4. Блок управления 1 (БУ1)состоит из счетчика и дешифратора номера строки и обеспечивает построчное управление вводом УП и контроль структуры адреса.
5. Блок управления 2 (БУ2)состоит из буферного регистра узла сбоя и узла управления вводом строки, выполняет настройку системы ЧПУ на заданный режим работы и определяет знак числа.
6. Блок управления 3 (БУЗ)состоит из регистра и дешифратора адресов, узла управления ФСУ и осуществляет управление по кадровым вводам, при поиске заданного номера кадра N или начала УП («%»), расшифровку адресов команд и распределение их содержимого по соответствующим адресам.
7. Блок регистров контроля номера кадра коррекции (БP NL)состоит из регистров NL, узла совпадения, что обеспечивает поиск необходимого кадра, номер которого записан в данных регистра, и введение в данный кадр коррекции.
8. Блок памяти технологических команд (БР SМТ)включает в свой состав рабочие и буферные регистры, выполняющие хранение номеров данных команд до прихода на запись нового кадра.
9. Ячейки цифровой индикации (ЯЦИ)служат для хранения содержимого данных команд с выдачей их на индикацию.
Лентопротяжный механизм и ФСУ блока ввода, которые показаны на рис. 4.8, работают в старт-стопном режиме при считывании УП, в режиме поиска заданного кадра и режиме поиска начала программы при перемотке ленты после отработки УП. Кроме того, лентопротяжный механизм (ЛПМ)имеет ручное управление для перемотки ленты.
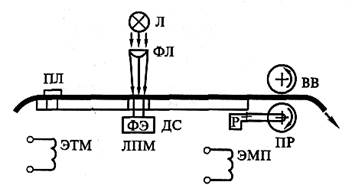
Рис. 4.8. Устройство ввода: лентопротяжный механизм и ФСУ
В режиме отработки УП по команде «Ввод» включается электромагнит пуска (ЭМП),который посредством прижимного ролика (ПР)рычагом (Р)прижимает ленту к лентопротяжному (ведущему) валику (ВВ).Лента протягивается по диафрагменному столику (ЦС)с растровыми отверстиями со скоростью 300 строк/с; при встрече с символом «Конец кадра» (LF)происходит отключение ЭМП ивключение электромагнита торможения (ЭМТ),который, прижимая ленту к каналу, прекращает ее движение.
В режиме «Поиск кадра» включившийся ЭМП протягивает перфоленту (ПЛ)до встречи с адресом Nа (на ленте), совпадающим с установленным адресом Na на переключателе номера кадра; сигнал совпадения отключает ЭМП и включает ЭМТ,останавливая ленту на данном кадре.
В режиме отработки УП при поступлении во входной блок команды М02(конец программы) или МЗ0(конец ленты) включается обратный ход привода перемотки и при встрече с символом «%» (начало УП) происходит отключение ЭМП и включение ЭМТ.Лента останавливается в начале УП.
Дешифратор адресов блока ввода (рис. 4.9) включает в себя регистр для хранения дешифруемого адреса Т1...Т5, атакже элементы, дешифрирующие признак адреса Э1...Э5,которые по сигналу от седьмой строки разрешают запись адреса в регистр; дешифрирующую матрицу, состоящую из элементов Э6...Э17,в которой происходит расшифровка признака кода адреса; формирователь адресов, состоящий из элементов Э18... Э29,которые формируют сигналы для записи адресов в соответствующие регистры. Адреса команд группы SMT формируются при наличии сигнала «Сброс логики». Сформированный сигнал адреса сохраняется в дешифраторе адресов до прихода следующего адреса.
Дешифратор адресов работает следующим образом. При считывании адреса X, кодовая комбинация которого имеет содержание 1011000, триггеры регистра установятся в состояние Т1 – 1, Т2 – 1, ТЗ – 1, Т4 – 0, Т5 – 0.При таком состоянии триггеров откроется элемент Э7, который своим выходом на элементе Э19сформирует сигнал, разрешающий запись по адресу X. Кодовая комбинация 1011000 не дает всех единиц на входах остальных элементов, следовательно, остальные регистры будут под запретом (отсутствие сформированного сигнала).
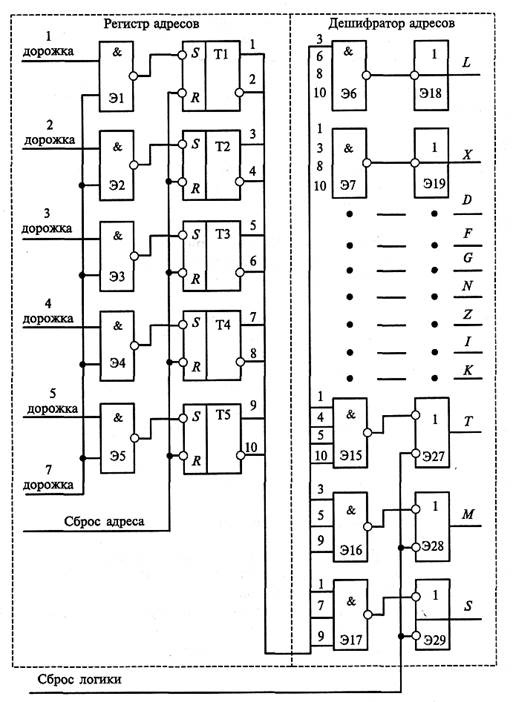
Рис. 4.9. Функциональная схема дешифратора адресов
4.2.3 Блок управления преобразованием
В большинстве СЧПУ преобразование информации большого формата осуществляется не дешифрацией одного кода в другой, а методом вычислений посредством процессора и регистра преобразователя. Алгоритм преобразования имеет в этом случае следующее содержание (рис. 4.10).
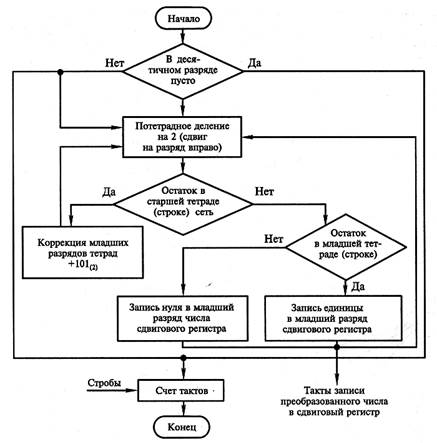
Рис. 4.10. Структурная схема алгоритма работы
блока управления преобразованием
Введенное двоичное число в сдвиговом регистре потетрадно сдвигается вправо (деление на два). Если в старшем разряде тетрады есть остаток, то тетрада следующего разряда корректируется суммированием тетрады с числом пять. Кроме того, если в младшей тетраде есть остаток, то в сдвиговый регистр-накопитель записывается единица и тактом записи выполняется сдвиг числа в сдвиговом регистре на один разряд.
Таблица 4.1
| Такты работы | Десятичный код | Двоично-десятичный код (преобразуемый) | Двоичный код в сдвиговом регистре накопителя | ||
| Начало | 9 7 5 | ||||
| 1Т | 4,5 3,5 2,5 | 0100,1 | 0011,1 | 0010,1 | |
| Коррекция | 4 8 7 | ||||
| 2Т | 2 4 3,5 | 0011,1 | |||
| Коррекция | 2 4 3 | ||||
| 3Т | 1 2 1,5 | 0001,1 | |||
| Коррекция | 1 2 1 | ||||
| 4Т | 0,5 1 0,5 | 0000,1 | 0000,1 | ||
| Коррекция | 0 6 0 | ||||
| 5Т | 0 3 0 | ||||
| Коррекция | 0 3 0 | ||||
| 6Т | 0 1,5 0 | 0001,1 | |||
| Коррекция | 0 1 5 | ||||
| 7Т | 0 0,5 2,5 | 0000,1 | 0010,1 | ||
| Коррекция | 0 0 7 | ||||
| 8Т | 0 0 3,5 | 0011,1 | |||
| Коррекция | 0 0 3 | ||||
| 9Т | 0 0 1,5 | 0001,1 | |||
| Коррекция | 0 0 1,5 | 0001,1 | |||
| 10Т | 0 0 0,5 | 0000,1 | |||
| Конец | 0 0 0 |
При отсутствии в младшей тетраде остатка в сдвиговом регистре-накопителе тактом записи производится сдвиг только на один разряд. После полного преобразования двоично-десятичного кода счетчик тактов дает сигнал об окончании преобразования и перезаписи преобразованного числа из сдвигового регистра накопителя в соответствующий регистр.
4.2.4 Блок задания скорости
Блок задания скорости (БЗС)обеспечивает заданную скорость подачи, разгон и торможение в начале и конце участков обработки по определенному закону, чаще всего линейному, и установочное движение с повышенной скоростью. Блок задания скорости состоит из рабочего регистра скорости и хранит код скорости подачи, назначенной в УП, или код скорости, до которой осуществляется разгон или торможение (рис. 4.11).

Рис. 4.11. Функциональная схема блока задания скорости
Регистр-накопитель совместно с операционными сумматорами 1 и 2 и рабочим регистром подачи представляет собой вычислительное устройство для вычисления выходной частоты (управляющее слово F y) согласно значению суммируемой константы, которая является кодом скорости подачи (F np)или текущей скоростью подачи, вычисляемой в режиме разгона–торможения (F т ± Δ F).
Рабочий регистр подачи хранит код скорости подачи, заданный в УП, или вычисленный код скорости, т. е. ее текущее значение при разгоне или торможении (F т + Δ F, где F т – текущее значение скорости, Δ F – приращение).
Дешифратор процентной коррекции скорости подачи, блок сравнения и дешифратор текущего значения кода скорости подачи обеспечивают сравнение запрограммированной скорости подачи с текущим значением вычисленной скорости подачи (действующая), поступающим из дешифратора кода текущей скорости подачи, чтобы обеспечить прекращение разгона или торможения в тот момент, когда текущая скорость подачи достигает значения, равного заданной в УП скорости перемещения.
Блок определения длины тормозного пути вместе с дешифратором процентной коррекции скорости подачи определяет длину пути торможения или разгона согласно временным установкам (временные установки У1…У4выбирают путем перестановки перемычек в процессе наладки с учетом динамики узлов станка). Дешифратор процентной коррекции скорости подачи управляет также делителем выходной части при изменении скорости подачи оператором с пульта.
1. Режим разгона.
При работе БЗСв режиме разгона в рабочий регистр скорости подачи засылается код скорости подачи, который соответствует ее значению, заданному в УП по адресу F в данном кадре. В регистрах интегратора хранятся нули или код текущей скорости подачи (F т), скоторой начинается разгон. Код текущей скорости подачи из интегратора подается в дешифратор текущего значения кода скорости подачи и с помощью блока сравнения сравнивается с программной скоростью подачи (F пр),заданной в рабочем регистре скорости подачи (скорость подачи, до которой совершается разгон).
Если F т < F пp,то вырабатывается сигнал разгона. В этом случае выполняется циклическое суммирование текущей скорости с приращением (F т + Δ F),с проверкой в каждом цикле условия F т < F пр. Поэтому текущая константа подачи будет увеличиваться. Это вызовет изменение частоты переполнения регистра-накопителя и увеличение скорости подачи (разгон).
2. Установившийся режим.
Когда F т станет равным F пр(рабочий орган достигнет заданной скорости), схема сравнения выработает сигнал ноль, суммирование Δ F прекратится, F тбудет равна константе и формируемая интегратором скорость подачи установится постоянной. В установившемся режиме (отсутствие разгона торможения) F = const интегратор будет давать постоянную частоту переполнения Fy (Fy – управляющее слово) посредством триггера переполнения,так как суммируемая константа F прне меняется.
Для обеспечения постоянства контурной скорости в БЗСвыполняется корректировка суммируемой константы путем выработки добавочного числа Nk, которое суммируется с основной константой подачи. Nk вырабатывается формирователем добавочного числа на основании полученных сведений о характере движения (число работающих координат, соотношение перемещения по координатам и т. д.). Эта добавочная константа будет вызывать изменение частоты переполнения интегратора, что вызовет корректировку скорости подачи с учетом возмущающих воздействий.
3. Режим торможения.
В режиме торможения засланное число конечной скорости торможения сравнивается с текущей подачей F т (действующая скорость подачи). Если F т > F пр,то вырабатывается сигнал торможения, который выполняет вычитание из F т приращения Δ F в интеграторе с последующей проверкой условия FT = F пр. При достижении F т = F npвырабатывается сигнал «0» блоком сравнения. Это прекращает вычитание Δ F, т. е. торможение.
Время торможения в СЧПУ задается фиксированным посредством установок, учитывающих время торможения рабочего органа с учетом динамики узлов. Поэтому временные установки могут меняться во время отладки СЧПУ с выбором оптимального пути торможения. Путь торможения рабочего органа зависит от начальной (конечной) скорости подачи и от временной установки, которая выбирается при наладке.
4.2.5 Принцип линейно-круговой интерполяции
При расчете траектории движения методом линейно-круговой интерполяции применяются два алгоритма.
1. Алгоритм вычисления траектории движения методом оценочной функции, в котором решаются алгебраические уравнения прямой или окружности;
2. Алгоритм вычисления траектории движения методом цифрового дифференциального анализатора (ЦДА), в котором решаются дифференциальные уравнения прямой или дуги, и приращения при интегрировании являются конечными, что обусловлено дискретностью реализуемых вычислений и движений.
Рассмотрим алгоритм линейно-круговой интерполяции методом оценочной функции.
1. Линейная интерполяция.
Прямая, лежащая в координатной плоскости (участок отработки) в выбранной системе координат,делит координатную плоскость на две области (рис. 4.12):
· область, где значение оценочной функции F ≥0 (геометрическое место точек, лежащих на прямой и над прямой);
· область, где оценочная функция F < 0 (геометрическое место точек, лежащих под прямой).
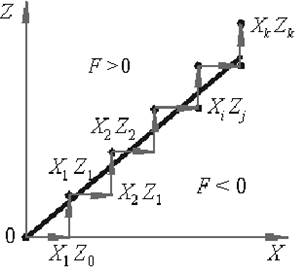
Рис. 4.12. Схема линейной интерполяции
Реализация движения такова: если найденное значение оценочной функции F > 0, то выполняется шаг по оси X; если оценочная функция F < 0, то осуществляется шаг по оси Z. В начале отработки УП или очередного кадра оценочная функция принимается равной нулю (F = 0), так как считается, что начальное положение вершины режущей кромки инструмента в начале УП или в начале кадра находится на линии отработки и начальный шаг производится по оси X.
При линейной интерполяции значение оценочной функции определяют из уравнения прямой:
 , (4.1)
, (4.1)
где хi, zj – текущие координаты; хk, zk – координаты конца участка.
Для упрощения работы процессора уравнение (4.1) преобразуется в уравнение, где значение оценочной функции вычисляется циклическим итерационным методом. Это дает возможность в качестве аргумента функции брать предыдущий результат вычислений и не оперировать новыми исходными данными.
При линейной интерполяции c F > 0выполняется шаг по оси X,при этом очередное значение текущей координаты х равно
 (4.2)
(4.2)
Подставив данное значение координаты в уравнение (4.1), получим уравнение для нахождения нового значения оценочной функции:
 (4.3)
(4.3)
Раскрыв скобки и сгруппировав члены уравнения, получим
 , (4.4)
, (4.4)
т.е. очередное значение оценочной функции находится путем вычитания из предыдущего значения оценочной функции константы zk.
При шаге по оси Z очередное значение текущей координаты равно
 (4.5)
(4.5)
Подставив данное значение в уравнение (4.1), получим уравнение для нахождения нового значения оценочной функции при шаге по оси Z:
 (4.6)
(4.6)
Сделав аналогичное преобразование, получим
 , (4.7)
, (4.7)
т.е. очередное значение оценочной функции находится путем прибавления к предыдущему значению оценочной функции константы хк.
Реализация движения по прямой осуществляется шагами с точностью до одной дискреты. При выполнении каждого очередного шага текущее (вычисленное) значение сравнивается с конечной координатой для выработки сигнала «Конец отработки кадра» и определяется новое значение оценочной функции для нахождения направления очередного движения.
Если отрабатываемые участки параллельны осям координат (ступенчатая поверхность), то движение будет происходить по одной из координат, так как знак оценочной функции на линии отработки не будет меняться до перехода к перпендикулярной поверхности.
2. Круговая интерполяция.
При круговой интерполяции дуга, лежащая в координатной плоскости (участок отработки) в выбранной системе координат, делит плоскость на две области (рис. 4.13):
· область, где оценочная функция F ≥ 0 (геометрическое место точек, лежащих на дуге и вне ее);
· область, где оценочная функция F < 0 (геометрическое место точек, лежащих внутри дуги).

Рис. 4.13. Схема круговой интерполяции
Значение оценочной функции при круговой интерполяции определяется уравнением окружности:
 , (4.8)
, (4.8)
где R – радиус дуги.
Аналогично линейной интерполяции уравнение (4.2) приводят к циклическому итерационному уравнению. Так, при шаге по оси X очередное значение текущей координаты равно
 (4.9)
(4.9)
Подставив данное значение в уравнение (4.8) для нахождения нового значения оценочной функции, получим
 (4.10)
(4.10)
Раскрыв скобки и сделав необходимые преобразования, получим
 (4.11)
(4.11)
Следовательно, для нахождения нового значения оценочной функции необходимо из предыдущего значения оценочной функции вычесть удвоенное произведение текущей координаты хi и прибавить единицу (удвоенное произведение получаем сдвигом числа).
При шаге по оси Z очередное значение текущей координаты
 (4.12)
(4.12)
Подставив его в уравнение (4.8), получим
 (4.13)
(4.13)
Сделав необходимые преобразования, получим
 (4.14)
(4.14)
Для нахождения нового значения оценочной функции необходимо к текущему значению оценочной функции прибавить удвоенное зна