Основу конструкции кранов-манипуляторов составляют пространственные механизмы со многими степенями свободы. Краны-манипуляторы предназначены для работы в сферах, где применение рабочей силы человека не целесообразно. За сходство во внешнем виде с человеческой рукой, рабочий орган крана-манипулятора (как и любого другого манипулятора) называют механической рукой. Кран-манипулятор состоит из привода, устройства управления, механической руки и устройства-захвата. Управление производится человеком-оператором через пульт управления.
В качестве привода может использоваться ручной (используется при поднятии и перемещении грузов на небольшие расстояния), электрический (на основе двигателя постоянного или переменного тока), гидравлический, пневматический и двигатель внутреннего сгорания. Последний используются в кранах, работающих независимо от электросети в передвижном транспорте.
Управление манипулятором осуществляется дистанционно при помощи пульта управления. Исполнительный орган крана-манипулятора имеет различное строение в зависимости от выполняемых им функций. Рабочим органом может служить схват наподобие кисти руки, кран, электромагнит, и т.п.
Основные сборочные единицы крана-манипулятора.
· Базовый грузовой автомобиль после незначительной доработки.
· Промежуточная силовая рама (подрамник или надрамник), жестко соединенная с рамой базового автомобиля, на которую монтируется как крано-манипуляторная установка, так и грузовая платформа.
· Крано-манипуляторная установка, установленная на промежуточной раме за кабиной или на заднем свесе автомобиля.
· Гидросистема крана-манипулятора с гидронасосом и коробкой отбора мощности (КОМ).
· Пневмопривод включения КОМ.
· Электросистема крана-манипулятора.
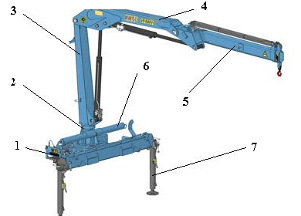
Основные элементы крана.
1 Рычаги управления
2 Неповоротная платформа с опорно-поворотным устройством
3 Колонна
4 Первая стрела
5 Вторая стрела
6 Механизм поворота
7 Выносные опоры
Сменные рабочие органы
Сменные рабочие органы являются специализированными грузозахватными приспособлениями, предназначенными для работы с различными типами грузов, что позволяет значительно расширить области применения гидроманипуляторов и обеспечить их высокую производительность и универсальность при использовании их в различных отраслях народного хозяйства. Рассмотрим грузозахватные устройства на примере продукции предприятия «Велмаш».
ПЛ-70.40, ПЛ-70.41, А-35, А-50 и ПЛ-30.30- грейферы, предназначены для работы с лесом, используются для погрузки, выгрузки, подтаскивания и ш
1) табелирования лесоматериалов
а б


в

Грейферы: а - ПЛ-70.40,ПЛ-70, б - 41А-35,А-50, в - ПЛ-30.30
2) ПЛ-70.48 и Р-20 - грейферы клещевые (пачковые), предназначены для бесчокерной трелевки леса, подтаскивания и штабелирования лесо-материалов.
а б


Клещевые грейферы: а - ПЛ-70.48, б - Р-20
3) ГЛ-1.00 - шестилепестковый грейфер, предназначен для работы с металлоломом и сыпучими материалами.

Шестилепестковый грейфер ГЛ-1.00
4) ГЛ-2.00 - шестилепестковый грейфер с усиленными металлоконструк-циями, предназначен для работы с металлоломом и материалами произвольной конфигурации и формы.

Усиленный шестилепестковый грейфер ГЛ-2.00.
5) ПЛ-70.43 ковшовые грейферы с вертикальным расположением гидроцилиндра, предназначены для погрузки сыпучих и малосыпучих материалов. Используются также для рытья траншей, канав и ям в грунтах 1 и 2 категории в немерзлом состоянии.

Ковшовый грейфер с вертикальным расположением гидроцилиндра ПЛ-70.43
6) ПЛ-70.44 - ковшовый грейфер с горизонтальным расположением гидроцилиндра, предназначен для погрузки сыпучих и малосыпучих материалов

Ковшовый грейфер с горизонтальным расположением гидроцилиндра ПЛ-70.44.
7) ПЛ-30.32 - вильчатый грейфер с вертикальным расположением гидроцилиндра, предназначен для погрузки и выгрузки силоса, сенажа, соломистых органических удобрений, спрессованных рулонов сена и рулонов сена в герметичной упаковке непосредственно перед скармливанием.

Вильчатый грейфер с вертикальным расположением гидроцилиндра ПЛ-30.32
8) ЗР-3 - захват для рулонов, предназначен для перемещения рулонов сенажа в герметичной упаковке.

Захват для рулонов ЗР-3
9) КМ-70.22 и КМ-70.23 - крюковые подвески, предназначены для погрузки, выгрузки штучных и затаренных грузов.

Крюковой подвесок КМ-70.22.
9) ВП-1.00 - вилочный подхват поддонов, предназначен для перемещения паллетированных грузов массой до 1,5 т.

Вилочный подхват поддонов ВП-1.00.
10) УГ-1.00 - устройство грузозахватное, предназначено для перемещения бордюрного камня и других предметов прямоугольного сечения.

Грузозахват для бордюрного камня УГ-1.00.
11) УГ-2.00 – устройство грузозахватное, предназначено для перемещения грузов имеющих отверстие.

Грузозахват для грузов имеющих отверстие УГ-2.00.
Заключение
Рассмотрены автотранспортные средства с манипуляторами, рассмотрена сфера деятельности, приведена классификация автомобилей, даны устройство и принцип работы КМУ, были подвергнуты анализу манипуляторы основных производителей. Также повествуется об удобстве и эффективности этих машин что делает их широко используемыми для любой деятельности, связанной с погрузкой или разгрузкой сырья или готовой продукции, перемещением ее на места складирования и хранения.
Список литературы
1. Автомобили: Специализированный подвижной состав: Учебное пособие/ М.С. Высоцкий, А.И. Гришкевич, Л.Х. Гилелес и др.; Под. ред. М.С. Высоцкого, А.И. Гришкевича. – Минск: Выш. шк., 1989.-240 с.