Выбору и проверке подлежат трансформатор, сглаживающий реактор и коммутирующая аппаратура.
Трансформаторное оборудование, используемое для КТЭУ, соответствует общим техническим требованиям ГОСТ 16772-77. Трансформаторное оборудование выбирается в соответствии с параметрами ТП.
Принимаем трансформатор ТСЗП-160/0,7-УХЛ4 с номинальными данными:
мощность - S=143, кВА;
напряжение сетевой обмотки - U1= 380, В;
Вентильная обмотка:
напряжение - U2=202, В;
ток - I2=408, А;
Преобразовательная обмотка:
напряжение - Uв=230, В;
ток - Iв=500, А;
Потери
холостого хода - Pхх=795, Вт;
короткого замыкания - Pкз=2400, Вт;
Напряжение короткого замыкания - Uк=4,5 %;
Ток холостого хода - Iхх=5,2 %;
Обозначение типа трансформатора содержит следующие данные:
Т - число фаз (трехфазный);
СЗ - охлаждение естественное воздушное при защищенном исполнении;
160 - типовая мощность в кВА;
0,7 - класс напряжения сетевой обмотки в кВ;
УХЛ4 - климатическое исполнение и категория размещения по
ГОСТ 15150-69.
Реакторное оборудование, используемое в КТЭУ, соответствует общим техническим требованиям ГОСТ 16772-77.
Принимаем реактор ФРОС-500/0,5У3, с номинальными параметрами:
- постоянный ток - Iн=500, А;
- индуктивность - Lн=3,25, мГн;
- активное сопротивление - Rа=7,5, мОм.
Определим параметры силового электрооборудования.
Активное сопротивление якорной цепи:
Rяц=Rдв+2Rтр+Rр+Rц, где
Rдв - активное сопротивление двигателя;
Rтр - активное сопротивление трансформатора;
Rр - активное сопротивление реактора;
Rп - активное сопротивление тиристорного преобразователя.
Активное сопротивление трансформатора рассчитывается по формуле:

где Uка - активная составляющая напряжения короткого замыкания;
Uка=Uк×0,31=4,5×0,31=1,395 %
U1ф, I1ф - напряжение и ток первичной обмотки трансформатора;
k - коэффициент трансформации;
k=U1/U2=380/202=1,881;
где U1,U2 - напряжения первичной и вторичной обмоток трансформатора;
I1ф=I2ф/k=262/1,881=216,9;
Находим активное сопротивление трансформатора:

Реактивное сопротивление трансформатора рассчитывается по формуле:

где Uкр - реактивная составляющая напряжения короткого замыкания;
Uкр=Uк×0,95=4,5×0,95=4,275.
Находим реактивное сопротивление трансформатора:

Активное сопротивление тиристорного преобразователя:

где m - число тиристоров. В данном случае m=6.
Находим активное сопротивление якорной цепи:
Rяц=0,0369+2.0,004+0,0075+0,0117=0,0604, Ом.
Суммарная индуктивность якорной цепи:
Lяц= Lтр+ Lр+ Lдв,
где Lтр - индуктивность обмоток трансформатора, находится:

где f1 - частота питающей сети - 50 Гц;
Lр - индуктивность сглаживающего реактора;
Lдв - индуктивность якоря двигателя, находится:

где p - число пар полюсов двигателя;
p=2.
Найдем суммарную индуктивность якорной цепи:
Lяц=0,039×10-3+3,25.10-3+1,64×10-3=4,929×10-3, Гн.
Электромагнитная постоянная времени якоря:

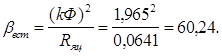
Жесткость естественной характеристики электропривода:
Механическая постоянная времени электропривода:

Максимальный ток якорной цепи двигателя (ток упора):
Iя max=2,5×Iн=2,5×385,2=963, А.
Определим коэффициенты передачи элементов электропривода. При этом будем считать, что рабочие области передаточных характеристик линейны, а сигнал управления, соответствующий максимальному значению управляемого параметра равен 10 В, т. е. максимальному уровню напряжения системы управления.
Коэффициент передачи тиристорного преобразователя:

где Udном - номинальное напряжение на выходе тиристорного преобразователя;
UСИФУmax - максимальное входное напряжение СИФУ.
Коэффициент передачи обратной связи по скорости:

где w0 - скорость холостого хода двигателя (принимаем её как максимальную).
Коэффициент передачи обратной связи по току:

Коэффициент передачи датчика напряжения:

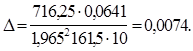
Статизм системы при М=Мном:

где k - суммарный коэффициент усиления элементов электропривода до двигателя;
k=kрс×kрт×kтп/kФ=8,57×1,61×23/1,965=161,5.
Uз - напряжение задания при максимальной скорости.
Uз=10 В.
Определим статизм системы:
Синтез регуляторов.
Регулятор тока якоря получает на вход сигнал задания uзт с выхода регулятора скорости и сигнал обратной связи uдт с выхода датчика тока. На выходе он формирует напряжение управления uу в СИФУ ТП, определяющее угол управления тиристоров a. Параметры регулятора выбираются по соотношениям:
R2C=Tя; R1C=Tи;
Сигнал обратной связи по току снимается с шунта, установленного в главной цепи; датчик тока осуществляет гальваническое разделение цепей управления от главных цепей и усилению по напряжению. Возможно также использование датчика тока на основе трансформаторов тока, установленных на стороне переменного тока ТП, и ключей, изменяющих полярность обратной связи при переключении выпрямительных мостов.
На регулятор тока возлагаются также другие функции: ограничение скорости нарастания тока di/dt, улучшение динамики контура тока в зоне прерывистого тока, компенсация влияния ЭДС двигателя на характеристики контура, обеспечение режима стоянки электродвигателя, управление переключением выпрямительных мостов реверсивного ТП.
В системах подчиненного регулирования выходной сигнал регулятора скорости является сигналом задания тока uзт для регулятора тока. На регулятор скорости и связанные с ним узлы возлагаются дополнительные задачи: ограничение сигнала uзт допустимым значением, которое может зависеть от значения потока двигателя Ф, ограничение скорости изменения тока di/dt, формирование требуемой жесткости механических характеристик ЭП, прием сигналов задания скорости двигателя wдв, обеспечение изменения wдв с определенным ускорением и др.
В КТЭУ предусмотрена возможность использования двух задатчиков скорости: сельсинового командоаппарата UR и ступенчатого задатчика AQ на 3 ступени “вперед” или “назад”. Выходы этих задатчиков соединяются вместе и подаются на вход задатчика интенсивности. В каждый момент задает скорость тот задатчик, который выбран (разрешен) внешним сигналом. Имеется вход для общего запрета задания, а также конечные ограничения для хода “вперед” или “назад”. При нуле нуль-орган AU выдает сигнал, разрешающий сборку схемы.