Исходные данные
1. Назначение
Система автоматического управления (далее по тексту САУ, или «система») предназначена для линейного перемещения горизонтального стола применительно к станкам фрезерной или координатно-расточной групп.
2. Состав САУ
Блок-схема системы автоматического управления приведена на рис. 1, а комбинированная схема силовой части - на рис. 2. САУ построена как система подчиненного регулирования, выполненная по контурам напряжения (тока), скорости, положения. В контуре напряжения (тока) имеется нелинейный элемент (на схеме не показан).
На рисунках приняты следующие обозначения:
 - управляющее воздействие;
- управляющее воздействие;
 - управляемая (регулируемая) координата;
- управляемая (регулируемая) координата;
 - ошибка системы;
- ошибка системы;
 - сигнал задания по управляющему воздействию;
- сигнал задания по управляющему воздействию;
 - сигнал главной обратной связи по регулируемой координате;
- сигнал главной обратной связи по регулируемой координате;
 - сигнал по ошибке;
- сигнал по ошибке;
ЧЭ - чувствительный элемент;
РП - регулятор положения;
У, КЗ - усилитель и корректирующее звено в контуре положения;
РС - регулятор скорости;
РН - регулятор напряжения (тока);
ТП- транзисторный (тиристорный) преобразователь;
М - исполнительный двигатель;
Р1 - механический редуктор силовой;
МП - механическая передача (шариковинтовая передача (ШВП));
Н - нагрузка (стол с деталью);
ДН, У - датчик напряжения, усилитель;
ТГ - тахогенератор;
Р2 - механический редуктор, приборный;
ДОС - датчик обратной связи;
ВТ - вращающийся трансформатор;
ПФН - преобразователь фаза-напряжение;
U 1, U 2, U 3, U Я - промежуточные координаты (управляющие напряжения соответственно РС, РН, ТП, ИД);
Д, 1, 2 - промежуточные координаты (угол поворота соответственно ИД, ШВП, ВТ);
 ,
,  - выходное напряжение, соответственно, ТГ и ВТ.
- выходное напряжение, соответственно, ТГ и ВТ.

Рис.1 Блок-схема системы автоматического управления.
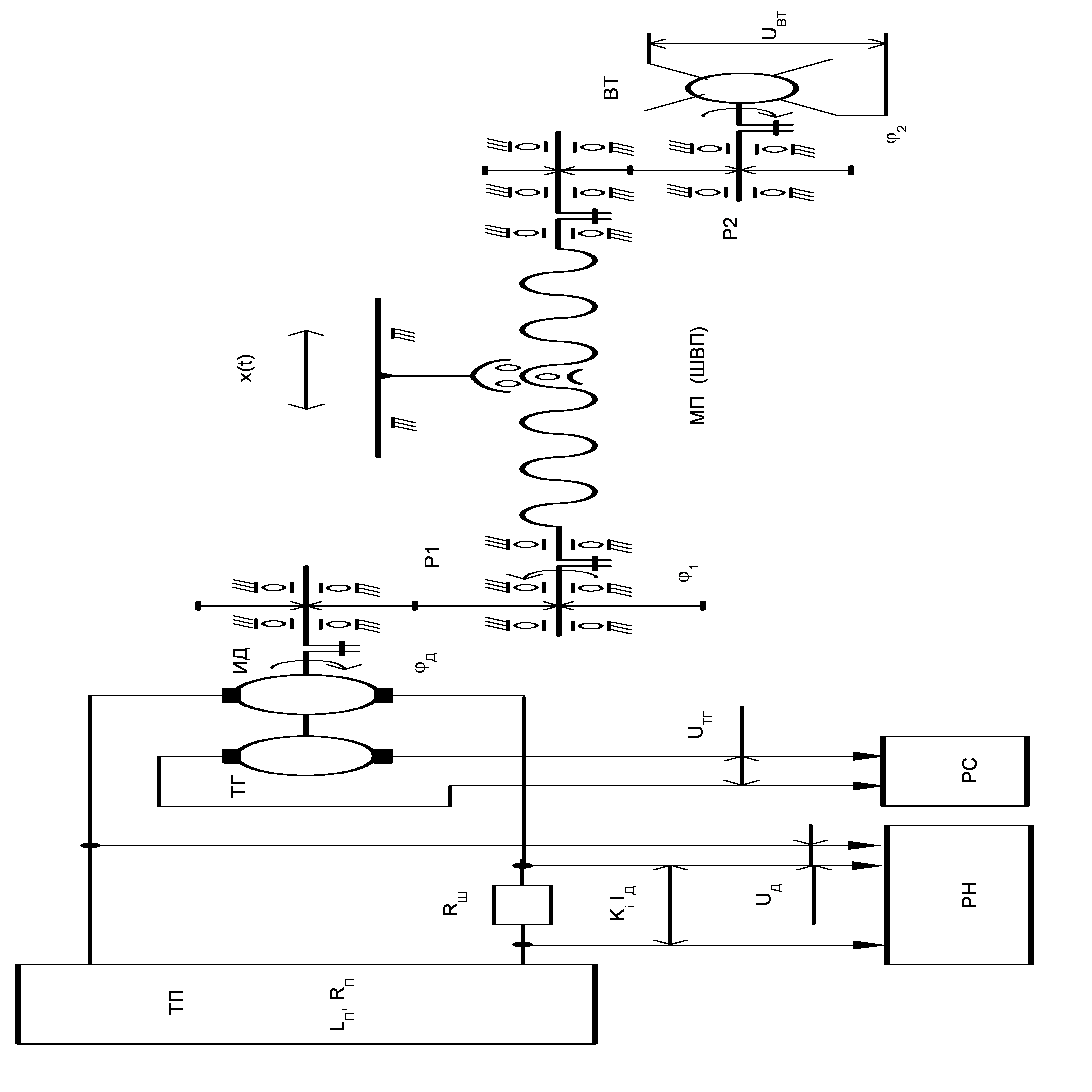
Рис.2 Комбинированная схема силовой части САУ
I. Анализ исходных данных
При проектировании всех технических устройств и систем исходным документом является техническое задание (ТЗ). Аналогом ТЗ при выполнении настоящей работы являются исходные данные, приведенные выше. В пояснительной записке необходимо привести все данные согласно пунктам раздела «Исходные данные». Взятые из таблиц сведения даются в следующей форме: название параметра (характеристики), условное обозначение, единицы измерения, числовое значение.
Характеристики системы автоматического управления
Характеристики системы автоматического управления
1.1. Характеристики исполнительного двигателя:
- мощность двигателя Р, кВт 1
- частота вращения n, об/мин 2000
- напряжение на якоре Uя, В 110
- ток якоря Iя, А 9.1
- активное сопротивление якорной цепи
двигателя Rя, Ом 1,45
- индуктивность якоря цепи
Lя, мГн 2,1
- момент инерции собственных вращающихся
частей двигателя Jя, кгм2 0,87*10-3
1.2. Тип и параметр преобразователя:
- тип ШИМ
- частота питания преобразователя F, Гц 1000
- число фаз n
- напряжение управления Uу, В 5
- активное сопротивление тиристорного преобразователя Rтп, Ом 0,35
- индуктивность тиристорного преобразователя Lтп, мГн 1,8
1.3. Вид и параметры регуляторов контуров:
- регулятор положения пропорциональный; К=4
- регулятор скорости пропорциональный; К=5
- регулятор напряжения пропорционально-интегральный; 0,02+2/р
1.4. Параметры схемы:
- максимальное перемещение Xmax, мм 320
- шаг винта ШВП γ, мм 10
- цена оборота ДОС β, мм 2
- цена импульса Δ, мм 0,005
1.5. Параметры управляющего воздействия, динамические характеристики САУ:
- максимальная скорость Vмакс, м/мин 10
- кинетическая ошибка δк, мм 1
- перерегулирование σ, % 25
- время переходного процесса tпп, с 0,08
- число перерегулирования n 2
Параметры нелинейных элементов
а1 = 0,2
а2 = 0,8
В = 0,8