ЛАБОРАТОРНАЯ РАБОТА №7
Цель работы: научиться переоборудовать непрерывный регулятор в цифровое устройство.
Постановка задачи: Классические методы синтеза позволяют построить непрерывный регулятор, который описывается передаточной функцией или соответствующим дифференциальным уравнением. В то же время в современных системах управления законы регулирования чаще всего реализуются с помощью цифрового компьютера или микроконтроллера. На цифровых компьютерах нельзя напрямую реализовать управляющее устройство, которое описывается дифференциальным уравнением в непрерывном времени. Задача переоборудования состоит в том, чтобы заменить спроектированный непрерывный регулятор цифровым устройством так, чтобы сохранить все существенные свойства непрерывной системы.
Необходимо:
1. Построить модель непрерывной системы в среде MatLab/Simulink;
2. Выполнить переоборудование непрерывного регулятора.
3. Сравнить переходные процессы в непрерывной и цифровой системах.
Теоретические сведения
Компьютер в контуре управления можно представить в виде последовательное соединение трех звеньев:
1) импульсного элемента, который выбирает из непрерывного сигнала ошибки  значения
значения  в моменты квантования
в моменты квантования  (при целых
(при целых  ); импульсный элемент моделирует аналого-цифровой преобразователь (АЦП);
); импульсный элемент моделирует аналого-цифровой преобразователь (АЦП);
2) линейного цифрового фильтра, который преобразует дискретную последовательность  в управляющую последовательность
в управляющую последовательность  ; свойства этого фильтра определяют закон управления;
; свойства этого фильтра определяют закон управления;
3) восстанавливающее устройство (экстраполятор), которое восстанавливает непрерывный сигнал управления  из последовательности ; экстраполятор моделирует цифро-аналоговый преобразователь (ЦАП), чаще всего используется фиксатор нулевого порядка, который удерживает постоянное значение
из последовательности ; экстраполятор моделирует цифро-аналоговый преобразователь (ЦАП), чаще всего используется фиксатор нулевого порядка, который удерживает постоянное значение  в течение очередного интервала квантования:
в течение очередного интервала квантования:
 .
.
Схема цифрового регулятора показана на рисунке 1:
Рис. 1. Схема цифрового регулятора
Блок ИЭ обозначает импульсный элемент (АЦП), блок ЦФ – цифровой фильтр, блок Э – экстраполятор (ЦАП). Точечные линии обозначают дискретные сигналы, сплошные линии – непрерывные сигналы.
Экстраполятором называют устройство, которое восстанавливает непрерывный сигнал управления по дискретной последовательности значений  , поступающих с выхода цифрового фильтра в моменты времени . В простейшем случае ЦАП, получив новый управляющий сигнал
, поступающих с выхода цифрового фильтра в моменты времени . В простейшем случае ЦАП, получив новый управляющий сигнал  от цифрового фильтра, просто удерживает (фиксирует) его в течение интервала квантования T (до получения следующего значения
от цифрового фильтра, просто удерживает (фиксирует) его в течение интервала квантования T (до получения следующего значения  ) (рис. 2). Такой экстраполятор называется фиксатором нулевого порядка (англ. zero-order hold, ZOH).
) (рис. 2). Такой экстраполятор называется фиксатором нулевого порядка (англ. zero-order hold, ZOH).
Рис. 2. Принцип работы фиксатора нулевого порядка.
Он восстанавливает сигнал по правилу .
Здесь  – так называемое локальное время, прошедшее с момента последнего срабатывания импульсного элемента.
– так называемое локальное время, прошедшее с момента последнего срабатывания импульсного элемента.
Существуют и более сложные экстраполяторы, учитывающие несколько последних значений последовательности , но они используются на практике крайне редко из-за проблем в реализации.
Цифровой фильтр – это устройство, преобразующее входную дискретную последовательность

в выходную

В реальных фильтрах для расчета очередного значения управляющей последовательности в момент времени  используется конечное число прошлых значений входного и выходного сигналов, хранящихся в оперативной памяти:
используется конечное число прошлых значений входного и выходного сигналов, хранящихся в оперативной памяти:

Здесь F – некоторая функция своих переменных и  – целое число. Чаще всего используют линейные законы управления, которые описываются формулой
– целое число. Чаще всего используют линейные законы управления, которые описываются формулой
 ,
,
где  и
и  – вещественные числа. Уравнение такого вида называют линейным разностным уравнением регулятора. Оно аналогично дифференциальному уравнению непрерывной системы, но входной и выходной сигналы изменяются в дискретном времени, т.е., определены только в моменты времени .
– вещественные числа. Уравнение такого вида называют линейным разностным уравнением регулятора. Оно аналогично дифференциальному уравнению непрерывной системы, но входной и выходной сигналы изменяются в дискретном времени, т.е., определены только в моменты времени .
Как и для линейных непрерывных систем, для описания линейных цифровых фильтров (линейных дискретных систем) можно использовать операторный метод. Для определения значений последовательности в предыдущие моменты квантования используется оператор сдвига назад  -1:
-1:  и
и  . Тогда, перенося в левую часть все члены, зависящие от выходной последовательности, можно записать уравнение регулятора в операторной форме
. Тогда, перенося в левую часть все члены, зависящие от выходной последовательности, можно записать уравнение регулятора в операторной форме
 .
.
Отношение

называется дискретной передаточной функцией цифрового фильтра. Таким образом, в операторной форме получаем  .
.
Фактически задача переоборудования сводится к тому, чтобы заменить передаточную функцию  непрерывного регулятора дискретной передаточной функцией цифрового фильтра
непрерывного регулятора дискретной передаточной функцией цифрового фильтра  так, чтобы сохранить все существенные свойства системы.
так, чтобы сохранить все существенные свойства системы.
Формула интегрирования по методу трапеций приводит к замене
 ,
,
которая называется преобразованием Тастина (или Тустена).
Рассмотрим непрерывный ПД-регулятор с передаточной функцией
 .
.
Дискретизация с помощью метода Тастина дает регулятор вида
 ,
,
где коэффициенты равны
 ,
,  ,
,  ,
,  .
.
Полученный дискретный регулятор только приближенно заменяет непрерывный, фактически он всегда будут работать несколько хуже, чем аналоговый.
В системе Matlab для переоборудования можно использовать функцию c2d из пакета Control Toolbox:
>> Dpd = c2d (Cpd, T, 'tustin')
Здесь Cpd – модель (например, передаточная функция) непрерывного ПД-регулятора, T –интервал квантования.
Теперь рассмотрим интегральный канал:
 .
.
С помощью преобразования Тастина получим:
 .
.
На рис. 3 показана схема цифрового регулятора с компенсацией насыщения:
Рис. 3. Струкруная схема цифрового регулятора
Здесь сплошные линии обозначают непрерывные сигналы, а штриховые – дискретные (числовые последовательности). ИЭ обозначает импульсный элемент (АЦП), а блок Э – экстраполятор (ЦАП).
Описание системы
В работе рассматривается система управления, структурная схема которой показана на рисунке 4.
Рис. 4. Структурная схема системы стабилизации выходной координаты y.
Передаточная функция объекта:
 , где
, где
 – постоянная времени,
– постоянная времени,  – коэффициент усиления объекта.
– коэффициент усиления объекта.
Привод приближенно моделируется как интегрирующее звено
 ,
,
охваченное единичной отрицательной обратной связью.
Для измерения регулируемой координаты используется измерительная система, математическая модель которой записывается в виде апериодического звена первого порядка с передаточной функцией:
 .
.
Исследуются переходные процессы в системе при использовании ПД-регулятора
 ,
,
и ПИД-регулятора
 .
.
Для компенсации эффекта насыщения, вызванного ограниченным ходом клапана, используется схема с внутренней нелинейной обратной связью, охватывающей интегратор в составе регулятора (рис. 3).
Для построения дискретной передаточной функции интегрального канала применяется метод интегрирования Эйлера (метод прямоугольников), т.е., замена
 .
.
В ходе выполнения работы требуется построить цифровые реализации регулятора при различных интервалах квантования и сравнить переходные процессы в непрерывной и цифровой системе управления.
Последовательность выполнения работы
1. Введите в рабочем поле MatLab аналоговый ПД-регулятор и преобразуйте его в цифровой по методу Тастина, с помощью следующих команд:
T = 1;
Cpd = tf(Kc*[Ts+1 1], [1 1]);
Dpd = c2d (Cpd, T, 'tustin');
[nD,dD] = tfdata (Dpd);
Здесь Т = 1 – шаг квантования.
2. Откройте модель, построенную в лабораторной №6. Измените в подсистеме «Нелинейная система» привод с нелинейными элементами на привод в виде апериодического звена первого порядка. Переименуйте «Нелинейную систему» в «Цифровую систему».
3. Откройте «Цифровую систему» и удалите блоки ПД-регулятор и Интегрирующее звено. Откройте библиотеки блоков и скопируйте на освободившееся место два блока Discrete Transfer Fcn (дискретная передаточная функция) из группы Discrete. Задайте их параметры:
ПД-регулятор
Numerator: nD
Denominator: dD
Sample time: T
Интегратор
Numerator: [T]
Denominator: TI*[1 -1]
Sample time: T.
4. Добавьте на выход регулятора блок Zero-order hold (фиксатор нулевого порядка) из группы Discrete и установите интервал квантования  .
.
5. Соберите схему, показанную на рисунке.
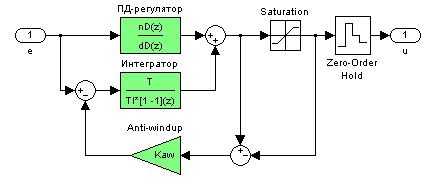
Пределы для блока Saturation  , коэффициент компенсации насыщения
, коэффициент компенсации насыщения  .
.
6. Выполните моделирование и сравните переходные процессы в непрерывной и цифровой системах.
7. Перенесите переходные процессы с осциллографов в рабочую область MatLab, с помощью команд: subplot, plot и т.д.
8. Создайте массив интервала квантования:
aT = [2 3 5];
создайте символьный массив с заданием цветов графиков:
col = 'bgr'; (‘b’ – синий; ’g’ – зеленый; ’r’ – красный.
Сделайте заголовок цикла и номер графика:
for i=1:length(aT);
Выберите значение интервала квантования из массива:
T = aT(i);
Преобразуйте аналоговй ПД-регулятор:
Dpd = c2d (Cpd, T, 'tustin');
[nD,dD] = tfdata (Dpd, 'v');
Выполните моделирование.
Перенесите графики в рабочую область MatLab:
subplot(2,1,1);
plot(phi(:,1),phi(:,3),col(i));
hold on;
subplot(2,1,2);
plot(delta(:,1),delta(:,3),col(i));
hold on;
Здесь команда hold on позволяет не стирать предыдущие графики.
9. Постройте для сравнения переходные процессы в непрерывной системе (второй столбец в массивах phi и delta:
subplot(2,1,1);
plot(phi(:,1),phi(:,2),'k--');
legend('T=2', 'T=3', 'T=5', 'Непрерывная система');
10. Добавьте самостоятельно аналогичные команды для второго графика (используйте второй столбец массива delta).
11. Сделайте выводы о максимальном допустимом интервале квантования, при котором переходные процессы в цифровой системе практически совпадают с переходными процессами в непрерывной системе.
Контрольные вопросы
1. В чем отличие непрерывной и цифровой систем управления?
2. В чем преимущества цифровых систем управления?
3. Что такое дискретная передаточная функция?
4. Что такое импульсный элемент? Моделью какого реального устройства он служит?
5. Что такое экстраполятор? Моделью какого реального устройства он служит?
6. Что такое фиксатор нулевого порядка? Почему более сложные экстраполяторы применяются редко?
7. Что такое цифровой фильтр?
8. Как найти дискретную передаточную функцию фильтра, заданного разностным уравнением?
9. Какая функция Matlab выполняет преобразование Тастина? Как ее вызывать?
10. Какие эффекты наблюдаются при увеличении интервала квантования?
11. Как обосновать выбор интервала квантования при переоборудовании непрерывного регулятора?
Таблица коэффициентов
| Вариант | 
| , сек
| Вариант |
| , сек
|
| 1. | 0.06 | 16.0 | 2. | 0.06 | 17.6 |
| 3. | 0.07 | 16.2 | 4. | 0.07 | 17.8 |
| 5. | 0.08 | 16.4 | 6. | 0.08 | 18.0 |
| 7. | 0.07 | 16.6 | 8. | 0.09 | 18.2 |
| 9. | 0.06 | 16.8 | 10. | 0.10 | 18.4 |
| 11. | 0.07 | 17.0 | 12. | 0.09 | 18.6 |
| 13. | 0.08 | 17.2 | 14. | 0.08 | 18.8 |
| 15. | 0.07 | 17.4 | 16. | 0.07 | 19.0 |