4.1 Определение параметров непрерывного регулятора скорости:
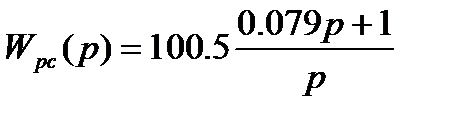
Передаточная функция регулятора имеет вид:
Wрс (р) = 
Принимаем C=0.1 мкФ и вычисляем:

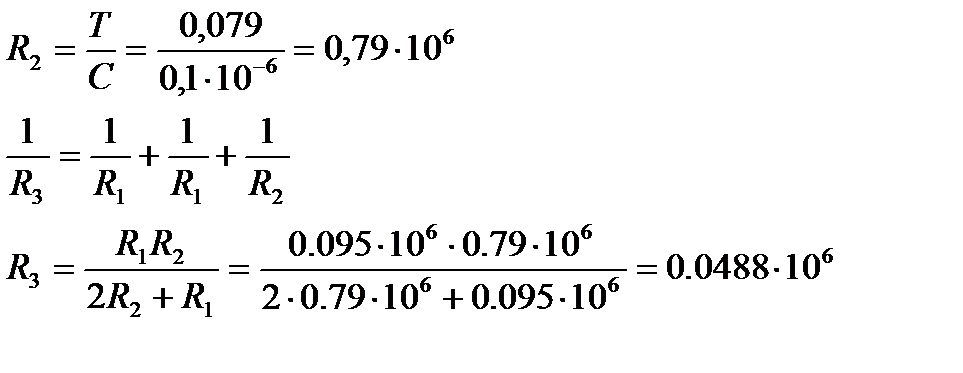
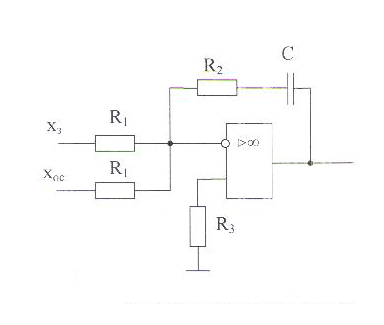
Рис. 23 Принципиальная схема регулятора скорости
4.2 Расчет алгоритма работы цифрового регулятора:
Для перехода от передаточной функции аналогового регулятора скорости Wpc (p) к соответствующей дискретной передаточной функции Wpc (z) выполним подстановку 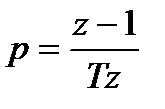 , где T=0.02c – период дискретности по времени:
, где T=0.02c – период дискретности по времени:

Преобразуем полученную дискретную передаточную функцию Wpc (z):
Перейдем к решетчатой функции z = nT:

Получили алгоритм работы цифрового регулятора в виде разностного уравнения общего вида:

Откуда, a1 = 9.9495; a2 = -7.9395; a3 = 0; b1 = 1; b2 = 0
4.3 Анализ качества системы с цифровым регулятором скорости при ступенчатом изменении управляющего воздействия ɷз (t) = 1 (t):
Построим переходный процесс в системе с цифровым регулятором при ступенчатом управляющем воздействии ɷз (t) = 1 (t) в приложении Simulink:
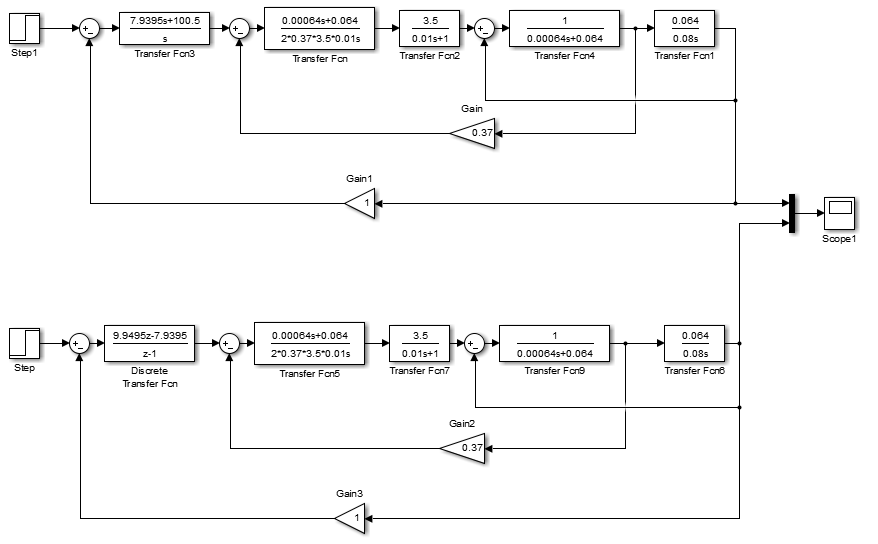
Рис.24. Структурные схемы САУ с аналоговым и цифровым регуляторами
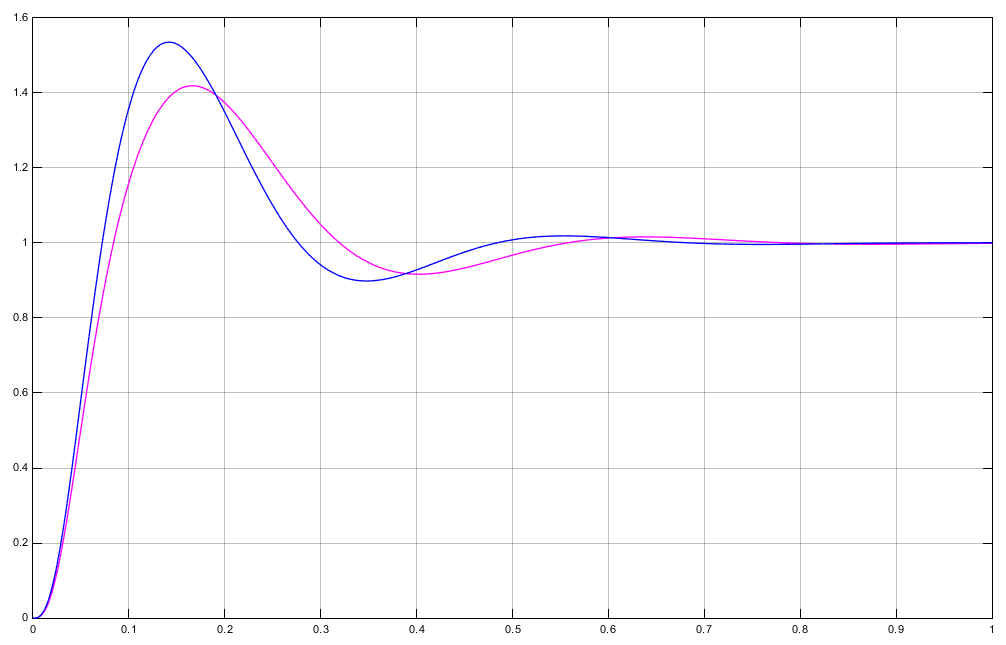
Рис. 25. Реакция регулирования скорости ɷ (t) с аналоговым и цифровым регулятором при ɷз (t) =1, iс (t) = 0, N(t) = 0
По графикам на рис.25 видно, что время достижения максимума и время переходного процесса у цифрового регулятора меньше, чем у аналогового; но, в свою очередь, у цифрового регулятора величина перерегулирования больше на 12%, чем у аналогового регулятора, и составляет порядка 53%. Объект управлении при использовании цифрового регулятора будет разгоняться быстрее, чем при использовании аналогового регулятора, однако увеличение величины перерегулирования не удовлетворяет предъявленным требованиям, что ведет к ухудшению качества регулирования.
Заключение
Целью курсового проекта являлся синтез последовательного корректирующего устройства – регулятора скорости для автоматизированного электропривода постоянного тока. С помощью математического аппарата и графических построений ЛАЧХ и ЛФЧХ удалось синтезировать регулятор скорости. Кроме синтеза корректирующего устройства, необходимо было проанализировать его поведение при различных типовых воздействиях (ступенчатом, линейно нарастающем, параболическом и трапецеидальном), возмущающем единичном ступенчатом воздействии и влиянии помех. Все смоделированные показания подтвердили правильность расчетов. Единственным неподтверждающим расчетные значения пунктом является отличие графического и расчетного значения амплитуд тока и частоты при влиянии помех, что, скорее всего, связано с округлением расчетных значений.
В ходе выполнения работы были использован комплекс Matlab и его приложение Simulink для моделирования систем САУ и их анализа при различных условиях.
В результате мы получили последовательно корректирующее устройство, которое обеспечивает требуемое качество регулирования и устойчивость ко всем рассматриваемым возмущающим процессам. Также был произведен анализ цифрового регулятора скорости, однако он не удовлетворял все заданные показателям регулирования.
Список литературы
1. Бесекерский В. А. Теория систем автоматического управления / В. А. Бесекерский, Е. П. Попов. СПб.: Профессия, 2003.
2. Современная теория управления: методические указания и типовые задания к курсовой работе по дисциплине «Современная теория управления» / Ишматов З.Ш,Казаков Е.В, Мезеушева Д.В; Екатеринбург, УрФУ, 2014, 23с.