Рассматривается движение и взаимодействие абсолютно твердых тел материальной системы.
Метод решения поставленной задачи основан на применении дифференциального принципа механики.
Пусть N тел, выбранных из материальной системы, взаимодействуют между собой и с другими телами системы, а на положения тел наложены ограничения (связи).
Понятия и определения.
1. Положения  тел по отношению к инерциальной системе отсчета определяют 6N скалярных параметров
тел по отношению к инерциальной системе отсчета определяют 6N скалярных параметров  (координаты, углы), то есть
(координаты, углы), то есть  . Положение
. Положение  удовлетворяет геометрическим уравнениям связей
удовлетворяет геометрическим уравнениям связей

Говорят, что совместимо со связями. При этом движение  удовлетворяет еще и уравнениям связей в кинематической форме, полученным дифференцированием по времени один или два раза геометрических уравнений связей.
удовлетворяет еще и уравнениям связей в кинематической форме, полученным дифференцированием по времени один или два раза геометрических уравнений связей.
Скалярные функции векторного аргумента  дважды непрерывно дифференцируемы по времени. Функционально независимые уравнения связей, для любого положения системы, совместимого со связями, позволяют из уравнений связей в вариациях
дважды непрерывно дифференцируемы по времени. Функционально независимые уравнения связей, для любого положения системы, совместимого со связями, позволяют из уравнений связей в вариациях

выбрать  независимых элементарных перемещений
независимых элементарных перемещений  , которые удовлетворяют уравнениям связей в вариациях в следующем виде:
, которые удовлетворяют уравнениям связей в вариациях в следующем виде: 
Элементарные перемещения  называются виртуальными (возможными) перемещениями. Скалярные параметры (координаты и углы)
называются виртуальными (возможными) перемещениями. Скалярные параметры (координаты и углы)  которые соответствуют независимым виртуальным перемещениям
которые соответствуют независимым виртуальным перемещениям  , называются обобщенными координатами. Говорят, что в иртуальные перемещения совместимы со связями.
, называются обобщенными координатами. Говорят, что в иртуальные перемещения совместимы со связями.
Число  обобщенных координат, определяющих положение N твердых тел, называется числом степеней свободы этих тел.
обобщенных координат, определяющих положение N твердых тел, называется числом степеней свободы этих тел.
 Пример. Плоское качение цилиндра без проскальзывания по негладкой плоскости.
Пример. Плоское качение цилиндра без проскальзывания по негладкой плоскости.
В общем случае положение твердого тела определяется шестью координатами – тремя координатами полюса в теле, и тремя углами поворота. В данном примере шесть параметров связаны пятью уравнениями связей:

Условие качения без проскальзывания выражает первое уравнение. В нем для некоторой точки К на поверхности цилиндра принято, что в начальном положении (К0) она находилась в начале координат. Цилиндр имеет одну степень свободы, так как ненулевые виртуальные перемещения (вариации координат) связаны одним уравнением связей в дифференциалах (вариациях):

Не совместимые со связями элементарные перемещения  системы тел произвольны, независимы и не удовлетворяют уравнениям связей.
системы тел произвольны, независимы и не удовлетворяют уравнениям связей.
2. Силы инерции твердого тела. Главный вектор и главный момент сил инерций тела.
Поле элементарных сил инерций  твердого тела определяется по Даламберу
твердого тела определяется по Даламберу

по полю абсолютных ускорений  всех элементарных масс
всех элементарных масс  тела, положение которых по отношению к центру масс С задается векторами
тела, положение которых по отношению к центру масс С задается векторами  . При этом поле ускорений имеет вид:
. При этом поле ускорений имеет вид:

Здесь  есть абсолютное ускорение центра масс тела,
есть абсолютное ускорение центра масс тела,  - абсолютная угловая скорость, а
- абсолютная угловая скорость, а  - абсолютное угловое ускорение тела. В системе координат, связанной с телом, векторы постоянны.
- абсолютное угловое ускорение тела. В системе координат, связанной с телом, векторы постоянны.
Определение. Для тела вектор

есть главный вектор сил инерции, а вектор

есть главный момент сил инерции относительно центра масс С.
В системе координат, связанной с телом, главный момент сил инерций вычисляется по формуле

Здесь  есть оператор инерции тела относительно центра масс С. В системе координат, связанной с телом, элементы его матрицы
есть оператор инерции тела относительно центра масс С. В системе координат, связанной с телом, элементы его матрицы  постоянны.
постоянны.
Для плоского и вращательного движений твердого тела угловая скорость тела  и кинетический момент
и кинетический момент  параллельны и постоянны по направлению, поэтому
параллельны и постоянны по направлению, поэтому
 .
.
3. Работа системы сил на элементарном перемещении твердого тела.
Положение твердого тела определяется вектором положения полюса  и собственной ортогональной матрицей ориентации подвижного базиса по отношению к неподвижному базису O. Положение любой точки тела
и собственной ортогональной матрицей ориентации подвижного базиса по отношению к неподвижному базису O. Положение любой точки тела  , (
, ( ), задается в неподвижной системе координат вектором
), задается в неподвижной системе координат вектором  следующим образом:
следующим образом:

Элементарное изменение (вариация) положения тела определяется изменением положения всех его точек  векторами:
векторами:
 где
где  , а вектор элементарного поворота
, а вектор элементарного поворота  определяется кососимметричностью матрицы
определяется кососимметричностью матрицы  .
.
Далее в качестве полюса выберем центр масс тела С. Элементарная работа всех сил  твердого тела, линии действия которых проходят через точки тела
твердого тела, линии действия которых проходят через точки тела  , а элементарные перемещения - векторами
, а элементарные перемещения - векторами  , равна:
, равна:

Здесь  есть главный вектор всех действующих на тело сил, а
есть главный вектор всех действующих на тело сил, а  есть главный момент этих сил относительно центра масс.
есть главный момент этих сил относительно центра масс.
Если на векторы  и
и  твердого тела наложены связи, то число независимых вариаций координат
твердого тела наложены связи, то число независимых вариаций координат  меньше шести. В этом случае элементарную работу активных сил можно вычислять на независимых элементарных перемещениях :
меньше шести. В этом случае элементарную работу активных сил можно вычислять на независимых элементарных перемещениях : 
где  есть обобщенные силы системы.
есть обобщенные силы системы.
Элементарная работа сил инерций твердого тела вычисляется следующим образом:

Здесь  есть главный вектор сил инерций, а
есть главный вектор сил инерций, а  - главный момент сил инерций твердого тела, а элементарное перемещение центра масс и вектор элементарного поворота тела определяются полем элементарных перемещений точек тела.
- главный момент сил инерций твердого тела, а элементарное перемещение центра масс и вектор элементарного поворота тела определяются полем элементарных перемещений точек тела.
Виртуальная работа сил инерций при наличии связей вычисляется так же, но виртуальные перемещения удовлетворяют еще и уравнениям связей в вариациях.
Дифференциальный принцип механики системы тел с геометрическими связями. В любом положении системы N твёрдых тел, допускаемом связями, сумма элементарных работ всех сил взаимодействий и всех сил инерций равна нулю на любых элементарных перемещениях системы из данного положения:

Здесь  есть элементарная работа активных сил системы,
есть элементарная работа активных сил системы,  есть элементарная работа сил контактного взаимодействия, а
есть элементарная работа сил контактного взаимодействия, а  - элементарная работа сил инерции в любом положении системы, совместимом со связями.
- элементарная работа сил инерции в любом положении системы, совместимом со связями.
Подчеркнем. что элементарные перемещения системы со связями могут быть как совместимы, так и не совместимы со связям, однако положения тел всегда совместимы со связями.
Дифференциальный принцип механики на виртуальных перемещениях. Принцип Даламбера – Лагранжа.
Дифференциальный принцип механики на виртуальных (возможных) перемещениях применяют для написания дифференциальных уравнений движения системы, которые не включают неизвестные силы взаимодействия тел системы. Это возможно тогда, когда сумма элементарных работ сил контактного взаимодействия системы на виртуальных перемещениях равна нулю:

В этом случае говорят, что связи идеальны. Для идеальных связей из дифференциального принципа следует:
сумма элементарных работ всех работающих сил взаимодействий и всех сил инерций системы равна нулю на любых виртуальных перемещениях системы

Эту форму дифференциального принципа называют принцип Даламбера - Лагранжа.
Для системы N точек принцип Даламбера – Лагранжа запишем в виде:

Используя уравнения связей, вектор положения  и его вариацию
и его вариацию  можно выразить через обобщенные координаты
можно выразить через обобщенные координаты  и их виртуальные перемещения . В силу независимости и произвольности виртуальных перемещений , уравнение дифференциального принципа в любой его форме распадается на n уравнений. Эти уравнения имеют следующий вид:
и их виртуальные перемещения . В силу независимости и произвольности виртуальных перемещений , уравнение дифференциального принципа в любой его форме распадается на n уравнений. Эти уравнения имеют следующий вид:




Здесь введены следующие обозначения:


Далее приведены решения задач с использованием принципа Даламбера – Лагранжа.
 Задача 1. Каток 3 начинает подниматься без скольжения вверх по наклонной плоскости с помощью троса, намотанного на малый барабан катка, блока 2 с неподвижной осью и тяжелого груза 1 на конце троса. Найти движение тел 1 – 3, если известна масса
Задача 1. Каток 3 начинает подниматься без скольжения вверх по наклонной плоскости с помощью троса, намотанного на малый барабан катка, блока 2 с неподвижной осью и тяжелого груза 1 на конце троса. Найти движение тел 1 – 3, если известна масса  катка, массы
катка, массы  и
и  груза и блока, радиусы R и r большого и малого цилиндров катка, а также момент инерции катка I относительно оси, проходящей через центр масс С катка перпендикулярно к основанию цилиндров. Угол наклона плоскости с горизонтом равен
груза и блока, радиусы R и r большого и малого цилиндров катка, а также момент инерции катка I относительно оси, проходящей через центр масс С катка перпендикулярно к основанию цилиндров. Угол наклона плоскости с горизонтом равен  .
.
Решение. Включим в систему три движущихся тела. Они взаимодействуют между собой, а также с Землей и наклонной поверхностью. Система имеет одну степень свободы.
Связи системы идеальны: нить невесома, нерастяжима и не проскальзывает по телу 2, реакция наклонной плоскости не работает при качении тела 1 без проскальзывания.
Виртуальные перемещения тел, а также кинематические характеристики движения связаны следующими уравнениями:


Принимаем за независимое виртуальное перемещение системы перемещение  для груза 1 вниз по вертикали.
для груза 1 вниз по вертикали.
Главные векторы сил инерции  и главные моменты сил инерции вращающихся тел
и главные моменты сил инерции вращающихся тел  , с учетом уравнений связей, имеют вид:
, с учетом уравнений связей, имеют вид:

Дифференциальный принцип механики запишем в следующем виде:

Сокращая это уравнение на  , получим дифференциальное уравнение движения системы. Его решение показывает, что равноускоренное движение груза 1 происходит с ускорением
, получим дифференциальное уравнение движения системы. Его решение показывает, что равноускоренное движение груза 1 происходит с ускорением

В силу уравнений связей другие тела вращаются равноускоренно.
Задача 2. Два однородных сплошных диска c массами ,  и радиусами r1, r2 соединены невесомой лентой, намотанной на диски. Первый диск вращается вокруг неподвижной горизонтальной оси О, когда второй, разматывая ленту с обоих дисков, падает, так, что его центр масс С движется вертикально. Найти ускорение центра масс С падающего диска.
и радиусами r1, r2 соединены невесомой лентой, намотанной на диски. Первый диск вращается вокруг неподвижной горизонтальной оси О, когда второй, разматывая ленту с обоих дисков, падает, так, что его центр масс С движется вертикально. Найти ускорение центра масс С падающего диска.
 Решение. За два независимых параметра, определяющих движение системы, выберем углы поворота θ1 и θ2 цилиндров.
Решение. За два независимых параметра, определяющих движение системы, выберем углы поворота θ1 и θ2 цилиндров.
Рассматривая движение второго цилиндра как сложное – переносное вместе с лентой и относительное по отношению к ленте, по теоремам о сложении скоростей и ускорений точки С получим уравнения связей в кинематическом виде для движения:
Уравнения связей в вариациях:

Кинематическая форма уравнений связей:

Связи системы идеальны, поэтому принцип Даламбера - Лагранжа позволяет приравнять к нулю элементарную работу всех активных сил, всех сил инерций и всех моментов сил инерций системы на каждом из независимых виртуальных перемещений δθ1 и δθ2: 

В результате получим:

 Задача 3.Однородный сплошной цилиндр массой
Задача 3.Однородный сплошной цилиндр массой  и радиусом основания r скатывается вниз без скольжения по неподвижной цилиндрической поверхности с радиусом основания R из начального состояния покоя, определяемого углом
и радиусом основания r скатывается вниз без скольжения по неподвижной цилиндрической поверхности с радиусом основания R из начального состояния покоя, определяемого углом  . Написать дифференциальное уравнение движения цилиндра.
. Написать дифференциальное уравнение движения цилиндра.
Решение. Для решения задачи применим дифференциальный принцип механики, позволяющий найти как движение цилиндра, так его взаимодействие с цилиндрической поверхностью.
Цилиндр имеет одну степень свободы. Необходимые характеристики его действительного движения имеют вид:
 Здесь
Здесь  и
и  есть угловая скорость и угловое ускорение цилиндра.
есть угловая скорость и угловое ускорение цилиндра.
Для возможных перемещений уравнения связей запишутся в виде:

Главный вектор сил инерций  и главный момент сил инерций
и главный момент сил инерций  цилиндра имеют вид соответственно:
цилиндра имеют вид соответственно:

Элементарная работа силы тяжести равна

а сумма элементарных работ главного вектора и главного момента сил инерций на возможном (виртуальном) перемещении равна

Принцип Даламбера – Лагранжа примет вид:

откуда следует: 
Это есть дифференциальное уравнение движения цилиндра.
Подчеркнем, что возможные (виртуальные) перемещения совместимы со связями, то есть удовлетворяют уравнениям связей, и выражены по уравнениям связей через независимое (возможное) перемещение  .
.
Дифференциальный принцип механики на перемещениях, не совместимых со связями.
На элементарных перемещениях системы  , не совместимых со связями, дифференциальный принцип механики применяется тогда, когда движение системы известно (найдено), а необходимо найти силы контактного взаимодействия (силы реакций связей).
, не совместимых со связями, дифференциальный принцип механики применяется тогда, когда движение системы известно (найдено), а необходимо найти силы контактного взаимодействия (силы реакций связей).
Для каждого тела системы с номером s, s = 1, 2, …, N, элементарные перемещения  могут быть двух типов. Это либо поступательное перемещение (трансляция)
могут быть двух типов. Это либо поступательное перемещение (трансляция)  , либо элементарный поворот
, либо элементарный поворот  . Поэтому для N тел дифференциальный принцип можно записать так:
. Поэтому для N тел дифференциальный принцип можно записать так:

Здесь для каждого тела  есть главные векторы активных сил, сил контактного взаимодействия и сил инерций соответственно, а
есть главные векторы активных сил, сил контактного взаимодействия и сил инерций соответственно, а  есть главные моменты соответствующих сил относительно полюса трансляции О.
есть главные моменты соответствующих сил относительно полюса трансляции О.
Принцип применим к любому количеству тел (одному телу) системы.
Так как  ,
,  не удовлетворяют уравнениям связей, то они произвольны и независимы. Тогда, взяв за полюс центр масс тела С, имеем:
не удовлетворяют уравнениям связей, то они произвольны и независимы. Тогда, взяв за полюс центр масс тела С, имеем:

Для одного твердого тела (N = 1) из определений главного вектора сил инерций  и главного момента сил инерций
и главного момента сил инерций  , следуют дифференциальные уравнения движения абсолютно твердого тела, причем второе уравнение записано в подвижном базисе:
, следуют дифференциальные уравнения движения абсолютно твердого тела, причем второе уравнение записано в подвижном базисе:

Это есть теорема о движении центра масс тела в неподвижном базисе и теорема об изменении момента импульса относительно центра масс, записанная в подвижном базисе.
 Задача 1.
Задача 1.
Дифференциальное уравнение системы уже было написано в задаче 1. Чтобы написать уравнения, движения, включающие силы реакций взаимодействия тел 1-3 между собой и с другими телами системы всех взаимодействующих тел материальной системы, достаточно к каждому движущемуся телу применить дифференциальный принцип механики на элементарных перемещениях, не совместимых со связями. Силы  ,
,  реакций троса c двух различных сторон от блока, сила трения
реакций троса c двух различных сторон от блока, сила трения  и нормальная реакция N катка входят в следующие уравнения:
и нормальная реакция N катка входят в следующие уравнения:

Элементарные поступательные перемещения  и
и  , вдоль наклонной плоскости и перпендикулярно к ней, не совместимы со связями.
, вдоль наклонной плоскости и перпендикулярно к ней, не совместимы со связями.
Четыре уравнения имеют четыре неизвестных силы реакции (движение тел системы уже было найдено).
В задаче 2, движение которой было найдено выше, найти силу реакции  оси О и силу реакции
оси О и силу реакции  ленты.
ленты.
 Решение. Применим дифференциальный принципк двум цилиндрам на их поступательном перемещении
Решение. Применим дифференциальный принципк двум цилиндрам на их поступательном перемещении  вверх по вертикали, не совместимом со связями, а затем ко второму цилиндру на его поступательном перемещении вниз по вертикали
вверх по вертикали, не совместимом со связями, а затем ко второму цилиндру на его поступательном перемещении вниз по вертикали  , не совместимом со связями. В результате получим два уравнения с двумя неизвестными (ускорение
, не совместимом со связями. В результате получим два уравнения с двумя неизвестными (ускорение  уже найдено в задаче):
уже найдено в задаче):


Ответ:

 Задача. В условиях задачи 3, найти компоненты силы реакции цилиндрической поверхности как функции угла
Задача. В условиях задачи 3, найти компоненты силы реакции цилиндрической поверхности как функции угла  , определяющего движение центра масс С цилиндра.
, определяющего движение центра масс С цилиндра.
Силу реакции в точке касания цилиндра с поверхностью разложим на нормальную реакцию  и силу трения
и силу трения  . Для вычисления компонент силы реакции связи применим дифференциальный принцип механики на элементарных перемещениях, не совместимых со связями. Каждое из них независимо, поэтому на каждом из них сумма элементарных работ активных сил и сил инерций равна нулю. За элементарные перемещения возьмем поступательные элементарные перемещения
. Для вычисления компонент силы реакции связи применим дифференциальный принцип механики на элементарных перемещениях, не совместимых со связями. Каждое из них независимо, поэтому на каждом из них сумма элементарных работ активных сил и сил инерций равна нулю. За элементарные перемещения возьмем поступательные элементарные перемещения  в направлении нормали и в направлении касательной к неподвижной цилиндрической поверхности в точке касания цилиндра с поверхностью. Соответствующие уравнения имеют вид:
в направлении нормали и в направлении касательной к неподвижной цилиндрической поверхности в точке касания цилиндра с поверхностью. Соответствующие уравнения имеют вид:

Эти уравнения после сокращения на элементарные перемещения совпадают по форме с теоремой о движении центра масс цилиндра.
Для нахождения нормальной реакции поверхности в зависимости от положения цилиндра необходимо проинтегрировать дифференциальное уравнение движения. Но так как работающая сила тяжести является потенциальной силой, результатом первого интегрирования будет закон сохранения механической энергии
 .
.
Результаты вычислений дают следующие выражения для компонентов силы реакции:

 Задача. Мещерский, (42.10). Однородный стержень KL, жестко прикрепленный в его центре масс под углом α к оси АВ,вращается равноускоренно вокруг этой оси с угловым ускорением
Задача. Мещерский, (42.10). Однородный стержень KL, жестко прикрепленный в его центре масс под углом α к оси АВ,вращается равноускоренно вокруг этой оси с угловым ускорением  . Определить силы динамического давления оси АВ на подпятник А и подшипник В, если: М – масса стержня,
. Определить силы динамического давления оси АВ на подпятник А и подшипник В, если: М – масса стержня,  - его длина,
- его длина,  В начальный момент система покоилась.
В начальный момент система покоилась.
Решение. Силы реакций можно разделить на две части: одну часть, которая зависит от сил тяжести, и другую, которая вызвана вращением тела вокруг оси. Следуя условиям задачи, во всех уравнениях ее решения нет сил тяжести и их моментов, а найденные силы реакций связей называют динамические (добавочные) силы реакций. Динамические давления равны им по величине, а их проекции имеют противоположные знаки.
Применим дифференциальный принцип на перемещениях, не совместимых со связями. Так как они независимы, то на любом элементарном перемещении равна нулю сумма работ всех сил динамических реакций и главного момента сил инерций (главный вектор сил инерций равен нулю). Записывая необходимые характеристики главного момента сил инерций в главных центральных осях Оξηζ, связанных со стержнем (смотри рисунок), имеем:




Выберем в качестве элементарных перемещений повороты вокруг осей системы координат Оxyz и поступательные перемещения системы (стержень KL плюс ось АВ) вдоль этих осей.
Поворот  вокруг оси Оx:
вокруг оси Оx:

перемещение  вдоль оси
вдоль оси  :
:

перемещение  вдоль оси Оy:
вдоль оси Оy:

поворот  вокруг оси Оy:
вокруг оси Оy:
Решая систему уравнений, получим:


Задача 4. Однородный тонкий стержень  может качаться вокруг горизонтальной оси О в вертикальной плоскости, в то время как плоскость его качания вращается вокруг неподвижной вертикальной оси, проходящей через точку О, с постоянной угловой скоростью
может качаться вокруг горизонтальной оси О в вертикальной плоскости, в то время как плоскость его качания вращается вокруг неподвижной вертикальной оси, проходящей через точку О, с постоянной угловой скоростью  . Найти острый угол
. Найти острый угол  в относительном положении равновесия стержня.
в относительном положении равновесия стержня.
Решение. Их принципа Даламбера = Лагранжа при идеальности связей

имеем:  ,
,
где, так как  , момент сил инерций имеет вид:
, момент сил инерций имеет вид:
 .
.
В подвижных осях  ,
,  первая из которых направлена вдоль OA, имеем:
первая из которых направлена вдоль OA, имеем:



 Окончательно уравнение принципа запишется так:
Окончательно уравнение принципа запишется так:
 . Откуда, если
. Откуда, если  , получаем ответ:
, получаем ответ:
 , если
, если 
Положения равновесия консервативных систем.
Консервативная система имеет геометрические стационарные связи, а все работающие силы потенциальны.
Положения равновесия определяются свойствами полей потенциальных сил на множествах положений системы, совместимых со связями. А именно, в каждом положении равновесия равны нулю элементарная виртуальная работа силового поля и поля идеальных реакций связей:

 .
.
Это свойство сил взаимодействий примем за определение положений равновесия.
Но так как для потенциальных сил в положениях равновесия

равенство нулю полного дифференциала  потенциальной энергии
потенциальной энергии 
 , означает, что положения равновесия доставляют экстремум потенциальной энергии.
, означает, что положения равновесия доставляют экстремум потенциальной энергии.
Следующее определение положений равновесия консервативной системы тождественно предыдущему.
Положениями равновесия консервативной системы называются такие положения системы  , совместимые со связями, в которых потенциальная энергия системы U принимает экстремальные значения:
, совместимые со связями, в которых потенциальная энергия системы U принимает экстремальные значения:

Это определение не связано с движениями системы, и, таким образом, не зависят от начальных условий системы.
Из принципа Даламбера – Лагранжа следует, что на движениях системы в положениях равновесия должна быть равна нулю и элементарная работа сил инерций.
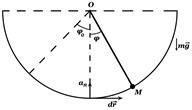 Пример 1. Потенциальная энергия математического маятника
Пример 1. Потенциальная энергия математического маятника

определенная на замкнутом интервале, на части окружности  имеет минимум потенциальной энергии в точке
имеет минимум потенциальной энергии в точке  и максимум на границе интервала
и максимум на границе интервала  . В первой точке равны нулю виртуальная работа силы тяжести, виртуальные работы силы реакции нити и силы инерции. Это есть положение равновесия. Однако на границе интервала виртуальная работа силы тяжести и силы инерции не равны нулю, поэтому граница интервала не есть положение равновесия.
. В первой точке равны нулю виртуальная работа силы тяжести, виртуальные работы силы реакции нити и силы инерции. Это есть положение равновесия. Однако на границе интервала виртуальная работа силы тяжести и силы инерции не равны нулю, поэтому граница интервала не есть положение равновесия.
 Пример 2. Потенциальная энергия сферического маятника
Пример 2. Потенциальная энергия сферического маятника 
имеет экстремум на множестве окружностей (на параллелях) на поверхности сферы с центром в точке О и в верхней и нижней точках сферы. Уравнения параллелей в сферических координатах имеют вид:

.
 Пример 3. Система состоит из однородного тонкого стержня АВ с массой М и груза D массой m, соединенного со стержнем невесомой нитью. При гладкости плоскостей консервативная система с одной степенью свободы имеет идеальные связи. При произвольных массах тел в системе нет положений равновесия. Но если
Пример 3. Система состоит из однородного тонкого стержня АВ с массой М и груза D массой m, соединенного со стержнем невесомой нитью. При гладкости плоскостей консервативная система с одной степенью свободы имеет идеальные связи. При произвольных массах тел в системе нет положений равновесия. Но если  , то все положения системы, допустимые связями
, то все положения системы, допустимые связями  , есть безразличные положения равновесия. Это видно из принципа виртуальных перемещений, который можно записать в следующем виде:
, есть безразличные положения равновесия. Это видно из принципа виртуальных перемещений, который можно записать в следующем виде:

:

Консервативные системы с циклическими координатами.
Определение. Обобщенная координата  , которая не содержится в функции Лагранжа
, которая не содержится в функции Лагранжа  , то есть при
, то есть при 

называется циклической координатой.
Если консервативная система не имеет циклических координат, то положения равновесия системы изолированы (локальны). В системах с циклическими координатами имеются множества безразличных положений равновесия, которые не являются изолированными.
В примере со сферическим маятником имеется циклическая координата  , поэтому параллели являются безразличными положениями равновесия маятника.
, поэтому параллели являются безразличными положениями равновесия маятника.
Изолированные положения равновесия обладают тем свойством, что в них система может находиться в покое, то есть при нулевых начальных условиях, на некотором конечном интервале времени движение отсутствует.
Дифференциальный принцип механики для систем в покое и для консервативных систем в положениях равновесия.
Если механическая система с идеальными связями находится в покое на конечном интервале времени, то равны нулю все силы инерции. Тогда

Это есть принцип виртуальных перемещений.
Используя обобщенные координаты системы и их вариации  , принцип виртуальных перемещений можно записать в следующем виде:
, принцип виртуальных перемещений можно записать в следующем виде:

где  есть обобщенные силы системы.
есть обобщенные силы системы.
В положениях равновесия консервативной системы с идеальными связями равна нулю сумма элементарных работ всех активных сил. Для консервативных систем обобщенные силы равны
 ,
,
где  есть потенциальная энергия системы. В этом случае в положениях равновесия потенциальная энергия системы имеет экстремум:
есть потенциальная энергия системы. В этом случае в положениях равновесия потенциальная энергия системы имеет экстремум:

 Задача 5. Определить величину вращающего момента М ворота радиусом R, а также соотношение между массами
Задача 5. Определить величину вращающего момента М ворота радиусом R, а также соотношение между массами  и
и  грузов 1 и 2 для того, чтобы грузы находились в покое. Массами блоков и тросов пренебречь.
грузов 1 и 2 для того, чтобы грузы находились в покое. Массами блоков и тросов пренебречь.
Решение. Система не консервативна и имеет две степени свободы. За обобщенные координаты примем вертикальные координаты  и
и  грузов 1 и 2. Уравнение связей в дифференциалах имеют вид:
грузов 1 и 2. Уравнение связей в дифференциалах имеют вид:

Можно проверить, что блоки и тросы есть идеальные связи.
Для решения задачи применим принцип на виртуальных перемещений:

В силу независимости  и
и  , имеем два уравнения:
, имеем два уравнения:

Ответ: 
 Задача 6. Однородный тонкий стержень АВ массой и длиной
Задача 6. Однородный тонкий стержень АВ массой и длиной  концами А и В скользит по гладким взаимно перпендикулярным направляющим. В точке В к стержню прикреплена нить, перекинутая через блок. К другому концу нити привязан груз М массой
концами А и В скользит по гладким взаимно перпендикулярным направляющим. В точке В к стержню прикреплена нить, перекинутая через блок. К другому концу нити привязан груз М массой  . Определить острый угол
. Определить острый угол  в положении равновесия системы, пренебрегая массами ползунов и блока.
в положении равновесия системы, пренебрегая массами ползунов и блока.
Решение. Система консервативна. Потенциальная энергия системы имеет вид:

Экстремум потенциальной энергии находим из уравнения:

откуда 
Задача 7.Однородные тонкие стержни ОА и АD соединены шарниром А. (AD=4AO). Гладкий  неподвижный упор В и неподвижный шарнир О позволяют системе находиться в покое при угле
неподвижный упор В и неподвижный шарнир О позволяют системе находиться в покое при угле  = 600 стержня ОА с горизонтом. Найти отношение масс стержней. Принять, что ОА=ОВ, а точки О и В находятся на одной горизонтали.
= 600 стержня ОА с горизонтом. Найти отношение масс стержней. Принять, что ОА=ОВ, а точки О и В находятся на одной горизонтали.
Решение. Система находится в равновесии. Все силы инерции равны нулю. Связи идеальны (реакции связей не работают на виртуальных перемещениях системы). Все реакции идеальных связей не являются существенными параметрами, определяющими положение равновесия системы, и поэтому находить их не нужно.
Уравнения связей имеют следующий вид (длина ОА обозначена  ):
):

а в вариациях эти уравнения запишутся так:

В силу этих уравнений, система имеет одну степень свободы. На виртуальных перемещениях работают только силы тяжести стержней ОА и АD, а их элементарная рабо