Тема: Габаритный расчёт двухкомпонентной системы переменного увеличения
План:
1. Изучить аналитический метод определения фокусных расстояний двухкомпонентной системы с двумя подвижными компонентами и неподвижной предметной плоскостью.
2. Определить оптимальные значения параметров  ,
,  и
и  (из заданного диапазона), обеспечивающие минимальные относительные отверстия компонентов системы и положительные воздушные промежутки между компонентами во всём диапазоне изменения увеличения. Определить параметры системы (
(из заданного диапазона), обеспечивающие минимальные относительные отверстия компонентов системы и положительные воздушные промежутки между компонентами во всём диапазоне изменения увеличения. Определить параметры системы ( ) и законы перемещения компонентов системы в соответствии с вариантом задания. Построить график законов перемещения компонентов.
) и законы перемещения компонентов системы в соответствии с вариантом задания. Построить график законов перемещения компонентов.
3. Провести компьютерное моделирование полученной системы в ППП «Zemax».
4. Проанализировать полученные результаты и сделать выводы о влиянии обобщенного параметра на область существования решения.
Исходные данные вариантов домашнего задания:
Относительное отверстие 1:5.6
| № варианта | Перепад увеличений

| Увеличение в среднем положении
|
| 1, 11 | [-5..-0.2] | |
| 2, 12 | [-5..-0.2] | |
| 3, 13 | [-5..-0.2] | |
| 4, 14 | [-5..-0.2] | |
| 5, 15 | [-5..-0.2] | |
| 6, 16 | [0.2..5] | |
| 7, 17 | [0.2..5] | |
| 8, 18 | [0.2..5] | |
| 9, 19 | [0.2..5] | |
| 10, 20 | [0.2..5] |
Оформление работы:
1. Работа должна быть оформлена в одном из форматов Microsoft Office Word или PDF в соответствии с ЕСКД (ГОСТ 7.32-2001, ГОСТ 2.105-95 и др.)
2. Привести последовательность расчёта
3. Заполнить таблицу:

|
|
|
| 
| 
| 
| 
|

| 
| 
| 
| 
| 
| 
| 
|
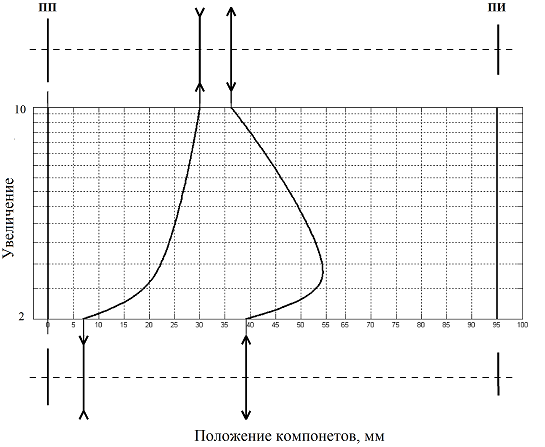
4. Пример законов перемещения:
5. В «Zemax» смоделировать систему для 3-х конфигураций (Multi-Configuration:  ; операнд THIC); АД расположить между компонентами.
; операнд THIC); АД расположить между компонентами.
|
|
Расчёт фокусных расстояний компонентов системы I.
Система I (рис. 1) по классификации Пахомова И. И. является двухкомпонентной системой с двумя подвижными компонентами и неподвижной предметной плоскостью.
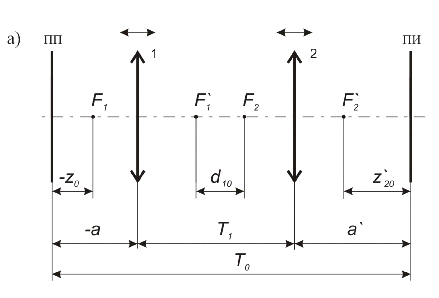
Рис.1
Параметры двухкомпонентной системы в случае оптической компенсации сдвига плоскости изображений вычисляются следующим образом:
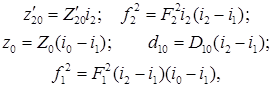
| (1.1) |
где  характеризуют передаточные отношения между перемещениями компонентов и предметной плоскостью,
характеризуют передаточные отношения между перемещениями компонентов и предметной плоскостью,  — обобщённые параметры, вычисляемые по формулам:
— обобщённые параметры, вычисляемые по формулам:
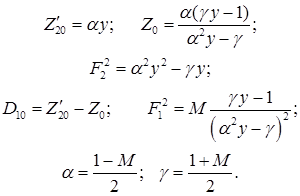
| (1.2) |
В представленных формулах  — перепад увеличений (равен перепаду фокусных расстояний в исходных системах),
— перепад увеличений (равен перепаду фокусных расстояний в исходных системах),  — обобщённый параметр, характеризующий передаточное отношение последнего компонента и величину смещения плоскости изображения.
— обобщённый параметр, характеризующий передаточное отношение последнего компонента и величину смещения плоскости изображения.
При неподвижной предметной плоскости  , тогда формулы (1.1) принимают вид:
, тогда формулы (1.1) принимают вид:
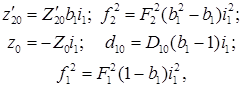
| (1.3) |
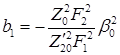
где  .
.
Увеличение системы I в среднем положении вычисляется по формуле:

| (1.4) |
Среднее положение системы — это такое положение компонентов, при котором обеспечивается увеличение  , относительно которого перепад увеличений до максимального увеличения
, относительно которого перепад увеличений до максимального увеличения  и до минимального
и до минимального  одинаков, т.е.:
одинаков, т.е.:  .
.
Из выражений (1.3) и (1.4) найдём значение  , при котором обеспечивается увеличение , определяемое при прямом переходе:
, при котором обеспечивается увеличение , определяемое при прямом переходе:
 . .
| (1.5) |
Из рис. 1 видно, что длина системы  равна:
равна:
 , ,
| (1.6) |
Фокусные расстояния  и
и  находим из (1.3):
находим из (1.3):
| (1.7) |
Из формулы (1.6) с учётом (1.3) определим требуемое значение параметра  , при котором обеспечивается длина , определяемая при переходе от исходных систем:
, при котором обеспечивается длина , определяемая при переходе от исходных систем:
 . .
| (1.8) |
Ввиду того что и имеют по два решения (1.7), принимает четыре значения обеспечивающие заданную длину при найденном по формуле (1.5) . Однако, поскольку одному значению соответствует два значения , а именно, со знаком «+» и «-», то не при всех полученных значениях обеспечивается заданное . Чтобы выбрать нужные решения, знак перед следует проверить по формуле (1.4).
|
|
Таким образом, алгоритм расчёта фокусных расстояний обобщённой системы I может быть составлен следующим образом:
1) задавшись параметром  , определяем по формулам (1.2) обобщённые параметры
, определяем по формулам (1.2) обобщённые параметры  ;
;
2) при известных и находим по формулам (1.5) и (1.8) и  соответственно;
соответственно;
3) далее по формулам (1.3) определяем фокусные расстояния и воздушные промежутки в среднем положении, проверяем решение для каждого по формуле (1.4) и отбираем верные решения.
2. Законы перемещения компонентов системы I.
Определим законы перемещения компонентов в случае механической компенсации смещения плоскости изображения.
Отметим, что при автоматизированном проектировании удобнее работать с оптическими силами, чем с фокусными расстояниями компонентов, поскольку при нулевой оптической силе фокусное расстояние равно бесконечности, что затруднительно для расчётов на ЭВМ. Поэтому для определения законов перемещений компонентов вместо фокусных расстояний будем использовать оптические силы. Введём обозначения  — оптическая сила
— оптическая сила  -го компонента эквивалентной системы,
-го компонента эквивалентной системы,  — расстояние между соответствующими компонентами,
— расстояние между соответствующими компонентами,  и
и  — расстояния от первого компонента до предметной плоскости и от последнего компонента до плоскости изображений (см. рис. 1).
— расстояния от первого компонента до предметной плоскости и от последнего компонента до плоскости изображений (см. рис. 1).
|
|
Из расчёта хода вспомогательного луча, входящего в систему под углом к оптической оси  и пересекающего первый компонент на высоте
и пересекающего первый компонент на высоте  , получим выражение:
, получим выражение:
 , ,
| (1.9) |
из которого находим:
 , ,
| (1.10) |
где  — текущее увеличение обобщённой системы.
— текущее увеличение обобщённой системы.
Из рассмотрения системы в обратном ходе лучей аналогично находим:
 . .
| (1.11) |
Из рис. 1очевидно, что длина обобщённой системы равна:
 . .
| (1.12) |
Подставив выражения (1.10) и (1.11) в (1.12), получим квадратное уравнение относительно  :
:
 , ,
| (1.13) |
где  , ,
| (1.14) |
Решение уравнения (1.13) имеет следующий вид:
 , ,
| (1.15) |
| Алгоритм расчета законов перемещения компонентов системы I: |
1) для  найти значения
найти значения  по формуле (1.14) и решение квадратного уравнения
по формуле (1.14) и решение квадратного уравнения  ;
;
2) при известных значениях находят значения  по формулам (1.11) и (1.10) для каждого значения
по формулам (1.11) и (1.10) для каждого значения  ;
;
3) далее строят графики  , где
, где  ;
;