ИССЛЕДОВАНИЕ ТОЧНОСТИ САУ В УСТАНОВИВШЕМСЯ РЕЖИМЕ
Целью работы является исследование точности регулирования систем автоматического управления в установившемся режиме и изучение методов ее повышения.
Общие понятия
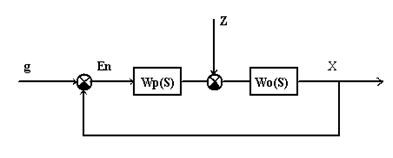
Исследование точности регулирования систем автоматического управления проводят путем анализа установившихся режимов ее функционирования. Ошибка регулирования  для линейной системы, функциональная схема которой приведена на рис.2.1, определяется следующим образом
для линейной системы, функциональная схема которой приведена на рис.2.1, определяется следующим образом
 , (1)
, (1)
где g(t) – задающее воздействие;
x(t) – выходной сигнал системы.
 |
А в области изображений S уравнение (1) запишется как
 . (2)
. (2)
Рис. 2.1
Связь между задающим воздействием g(t), возмущающим фактором z(t) и выходным сигналом системы x(t) в области изображений S устанавливается с помощью передаточных функций.
Связь между задающим воздействием g(t), возмущающим фактором z(t) и выходным сигналом системы x(t) в области изображений S устанавливается с помощью передаточных функций.
 , (3)
, (3)
где Wgx(S) – передаточная функция замкнутой системы по задающему воздействию g(t);
Wzx(S) - передаточная функция замкнутой системы по возмущающему фактору Z(t).
Для данной системы регулирования (рис.1) передаточные функции имеют вид

 , (4)
, (4)
где  передаточная функция разомкнутой системы;
передаточная функция разомкнутой системы;
Wp(S) - передаточная функция регулятора;
Wo(S) - передаточная функция объекта.
Подставляя выражения (3), (4) в (2),имеем
 (5)
(5)
Следовательно, полная ошибка регулирования Eп(S) состоит из 2 составляющих
 , (6)
, (6)
где  - ошибка регулирования, вызванная задающим воздействием g(t);
- ошибка регулирования, вызванная задающим воздействием g(t);
 - ошибка регулирования, вызванная возмущающим фактором z(t).
- ошибка регулирования, вызванная возмущающим фактором z(t).
Из выражений (5), (6) следует, что
 (7)
(7)
 , (8)
, (8)
где  - передаточная функция замкнутой системы по ошибке регулирования.
- передаточная функция замкнутой системы по ошибке регулирования.
Используя выражения (6) и(8) и теорему о предельных значениях  , при типовых воздействиях
, при типовых воздействиях  ,
,  установившиеся ошибки системы можно определить по следующим выражениям:
установившиеся ошибки системы можно определить по следующим выражениям:
 (9)
(9)
 (10)
(10)
 (11)
(11)
где  - установившееся значение полной ошибки
- установившееся значение полной ошибки
 - установившееся значение ошибки, вызванной задающим воздействием;
- установившееся значение ошибки, вызванной задающим воздействием;
 - установившееся значение ошибки, вызванной возмущающим фактором.
- установившееся значение ошибки, вызванной возмущающим фактором.
Уравнения (9)-(11) являются уравнениями статики, которые в статическом стационарном режиме ( ) связывают значения установившихся ошибок регулирования со значениями передаточных функций, определяемых при s=0. Первую составляющую полной ошибки регулирования
) связывают значения установившихся ошибок регулирования со значениями передаточных функций, определяемых при s=0. Первую составляющую полной ошибки регулирования  можно свести к нулю путем масштабирования. Тогда точность системы регулирования будет полностью характеризоваться статической ошибкой
можно свести к нулю путем масштабирования. Тогда точность системы регулирования будет полностью характеризоваться статической ошибкой 

Методы повышения точности системы
Значение передаточной функции разомкнутой системы  в стационарном режиме (s=0) определяется ее коэффициентом передачи
в стационарном режиме (s=0) определяется ее коэффициентом передачи  . Поэтому из анализа выражения (5) вытекает один из методов повышения точности САУ -увеличение коэффициента .
. Поэтому из анализа выражения (5) вытекает один из методов повышения точности САУ -увеличение коэффициента . 
Другим методом уменьшения ошибки регулирования является повышение астатизма системы. Данный метод позволяет устранить установившиеся ошибки при типовых воздействиях. Реализация астатизма путем введения интегрирующих звеньев приведена на рис.2.2. ПИ-регулятор системы обеспечивает ей астатизм 1 порядка, так как передаточная функция разомкнутой системы в общем виде имеет вид
 (12)
(12)
где T=  - постоянная форсирующей цепи;
- постоянная форсирующей цепи;

 - числитель и знаменатель передаточной функции объекта управления
- числитель и знаменатель передаточной функции объекта управления  .
.
Рис. 2.2
Повысить точность процесса регулирования системы возможно путем использования теории инвариантности. САУ является инвариантной по отношению к возмущающему воздействию z(t), если после окончания переходного процесса, определяемого начальными условиями, регулируемая величина x(t) и ошибка системы  не зависят от этого воздействия.
не зависят от этого воздействия.
САУ является инвариантной по отношению к управляющему воздействию g(t), если после окончания переходного процесса, определяемого начальными условиями, ошибка системы не зависит от этого воздействия. Оба эти определения имеют одну и ту же математическую трактовку и для обеспечения абсолютной инвариантности системы необходимо выполнение следующего условия
 (13)Реализовать условие (13) можно, используя принцип двухканальности, когда используется и принцип регулирования по отклонению, и принцип управления по задающему g(t) либо возмущающему z(t) воздействию. В структурной схеме САУ с комбинированным управлением (рис.2.3) канал с регулятором по возмущению Wpz(S) реализует управление по возмущающему воздействию.
(13)Реализовать условие (13) можно, используя принцип двухканальности, когда используется и принцип регулирования по отклонению, и принцип управления по задающему g(t) либо возмущающему z(t) воздействию. В структурной схеме САУ с комбинированным управлением (рис.2.3) канал с регулятором по возмущению Wpz(S) реализует управление по возмущающему воздействию.
 |
Рис. 2.3
Программа работы.
1. Набрать согласно рис 2.4 схему моделирования системы автоматического регулирования второго порядка.
Примечание: Модель П-регулятора W(S)=K1 набрать на отдельном линейном блоке.
2.. Выставить задающее воздействие g(t)=0, возмущающий фактор Z(t)=Zo*1(t), 5В  Zo 10В
Zo 10В
Примечание: сигнал Z(t) получить от источника эталонного сигнала, измерив предварительно Zo на цифровом вольтметре.
3. Получить на экране индикатора и зарисовать выходной сигнал x(t) и сигнал ошибки от возмущающего фактора 
Примечание: Вход индикатора “x” выбрать равным “10”, вход индикатора “Y” – “5”.
4 .Провести исследование системы с П-регулятором (рис.2.4). 4.1 Снять для коэффициента П-регулятора K1, равного 1,0; 2,5; 5,0; 7,5; 10., установившееся значение ошибки по возмущающему фактору  и построить зависимость
и построить зависимость  .
.
4.2 Получить выражение передаточной функции замкнутой системы по возмущающему фактору в стационарном режиме Wzx(0).
4.3 Используя выражение (11), рассчитать  для значений K1, указанных в п 4.1 и построить зависимость
для значений K1, указанных в п 4.1 и построить зависимость  Сравнить полученные результаты с пунктом 4.1 и оценить влияние К1.
Сравнить полученные результаты с пунктом 4.1 и оценить влияние К1.
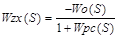
5. Провести исследование системы с ПИ-регулятором по схеме, приведенной на рис.2.5.
 |
Примечание: Модель интегратора “
 ” ПИ-регулятора набрать на отдельном линейном блоке, а его выходной сигнал подать насумматор линейного блока, на котором была реализована в п.1 модель П-регулятора..
” ПИ-регулятора набрать на отдельном линейном блоке, а его выходной сигнал подать насумматор линейного блока, на котором была реализована в п.1 модель П-регулятора..
Рис. 2.4
 |
Рис. 2.5.

Рис. 2.6
5.1 Зарисовать с экрана индикатора сигнал ошибки регулирования от возмущающего фактора  Объяснить почему установившееся значение ошибки
Объяснить почему установившееся значение ошибки  стремится к нулю?
стремится к нулю?
6. Провести исследование системы с комбинированным принципом управления, схема моделирования которой приведена на рис.2.6.
6.1 Используя условие инвариантности (13), определить выражение передаточной функции регулятора по возмущению Wpz(S), компенсирующего установившуюся ошибку регулирования .
6.2 Набрать с учетом полученного выражения Wpz(0). модель системы с комбинированным принципом управления (рис.2.6)
6.3 Зарисовать с экрана индикатора сигнал ошибки регулирования по возмущающему фактору .
6.4 Записать выражение сигнала от возмущающего фактора Xz, снимаемого с 4-го сумматора, обьяснить, почему установившаяся ошибка стремится к нулю.
Контрольные вопросы
1. Обьяснить ограниченность использования метода повышения точности САУ увеличением коэффициента усиления разомкнутой системы Kрс.
2. Недостатки метода повышения точности системы введением интегрирующих звеньев.