С разрывными колебаниями»
Выполнили студенты 432 группы
Кононов Р.А.
Мишустов С.П.
Нижний Новгород
Цель работы: изучение динамики систем, совершающих разрывные колебания, на примерах мультивибратора, триггера и кипп-реле.
Приборы и оборудование: экспериментальная установка, включающая в себя схемы мультивибратора и кипп-реле; генератор сигналов AFG 3102; осциллограф GOS 620FG.
Система с нелинейностью «туннельный диод» и ее состояния равновесия.
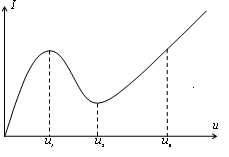
| Схемы, динамика которых является предметом исследования, содержит в качестве нелинейного элемента туннельные диоды. Вольтамперная характеристика такого диода приведена на рисунке 1. |
|
| Рис. 1. Вольт-амперная характеристика туннельного диода |
Характеристика имеет падающий участок (u1<u<u2), на котором проводимость туннельного диода является отрицательной величиной, что и позволяет получить разрывные колебания.
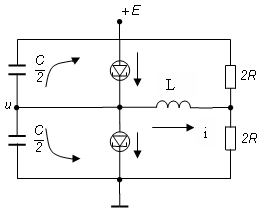
Схема, выполненная на туннельных диодах, приведена на рисунке 2, процессы в ней описываются следующими уравнениями:
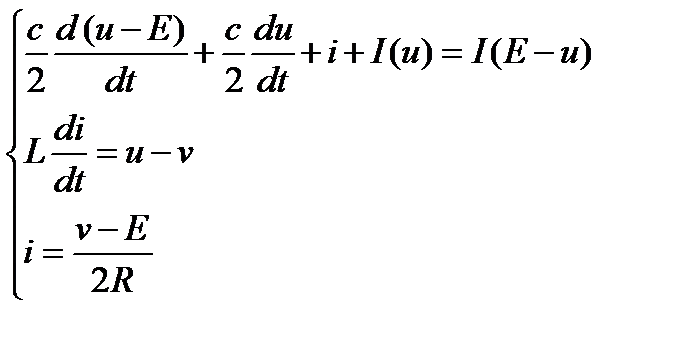
| (1) |

|
| Рис. 2. Принципиальная схема мультивибратора |
Если перейти к новым безразмерным переменным:  ,
,
параметр  ,
,  ,
,  ,
,  ,
,  - ток через туннельный диод, получим следующие уравнения:
- ток через туннельный диод, получим следующие уравнения:
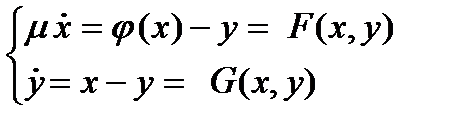
| (2) |
В системе, описываемой системой уравнений (2), возможны разрывные колебания, если  . Это система с малым параметром при старшей производной.
. Это система с малым параметром при старшей производной.
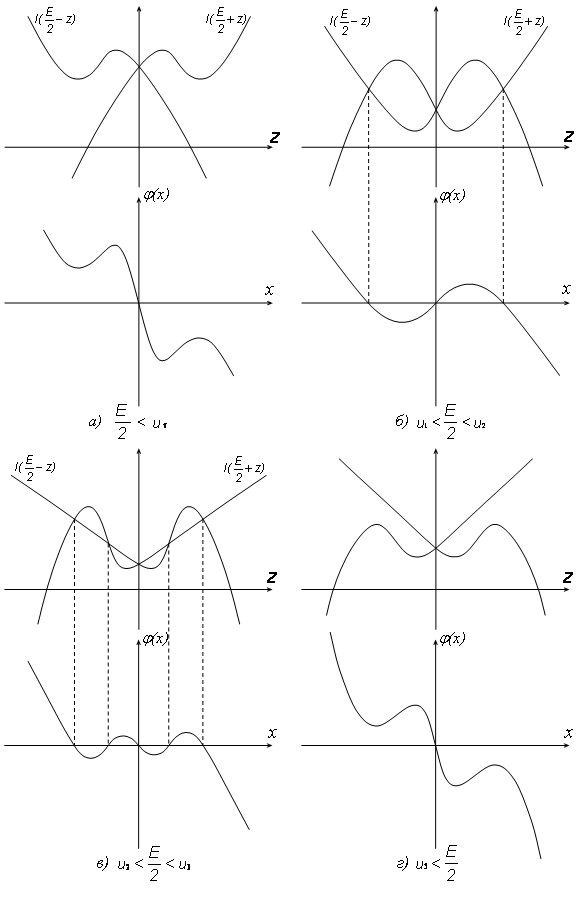
В зависимости от напряжения питания  функция φ(x) может принимать вид, изображенный на рисунке 3, при этом состояния равновесия системы (2 )
функция φ(x) может принимать вид, изображенный на рисунке 3, при этом состояния равновесия системы (2 )
(x0, y0 ) определяются пересечением кривой  с биссектрисой x=y. Таким образом, как видно из рисунка 3, схема может иметь от одного до пяти равновесных состояний.
с биссектрисой x=y. Таким образом, как видно из рисунка 3, схема может иметь от одного до пяти равновесных состояний.
|
| Рис. 3. Возможные виды функции φ(x) |
Разрывные колебания мультивибратора
Рассмотрим случай, когда φ(x) имеет вид, изображенный на рисунке 3(б), а состояние равновесия единственное. Это соответствует условию 0<S(0)<1 и тогда оно неустойчиво (с.р. будет всегда неустойчиво, т к  ).
).
Система описывается уравнениями (2)
|
| (2) |
Рассмотрим разбиения фазовой плоскости на траектории при  (рис 4).
(рис 4).
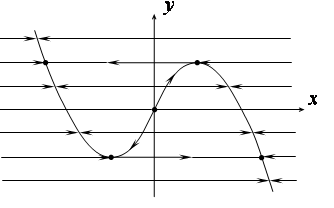
|
| Рис. 4. Разбиения фазовой плоскости на траектории |
Уравнения вида
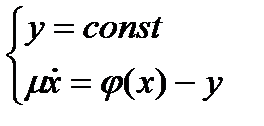
| (3) |
описывают так называемые «быстрые» движения системы. Направление движения определяется вторым уравнением. Эти приближенные (тем более точные, чем меньше  ) уравнения отображают динамику системы только вне малой окрестности кривой
) уравнения отображают динамику системы только вне малой окрестности кривой  .
.
Движения в малой окрестности кривой  , где
, где  , называются «медленными» движениями. Они отображаются следующими уравнениями:
, называются «медленными» движениями. Они отображаются следующими уравнениями:
| (4) |
Кривая «медленных» движений определяется первым уравнением, а направление движения на участках «медленных» движений - из второго уравнения системы (4).
Если изображающая точка системы, «медленно» двигаясь по траектории  там, где
там, где  , (а только здесь медленные движения устойчивы) приходит в одну из точек
, (а только здесь медленные движения устойчивы) приходит в одну из точек  или
или  , то далее она выходит в область «быстрых» движений и скачком попадает в точку
, то далее она выходит в область «быстрых» движений и скачком попадает в точку 
 по траектории
по траектории  , пока снова не придет на траекторию «медленного» движения. Замкнутая кривая
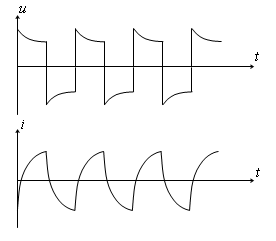
, пока снова не придет на траекторию «медленного» движения. Замкнутая кривая  является предельным циклом, устанавливающимся при любых начальных условиях. Такая система является автоколебательной, генерирующей разрывные колебания. Осциллограммы колебаний u и i приведены на рисунке 5.
является предельным циклом, устанавливающимся при любых начальных условиях. Такая система является автоколебательной, генерирующей разрывные колебания. Осциллограммы колебаний u и i приведены на рисунке 5.
|
| Рис.5. Осциллограммы разрывных колебаний |