По курсу «Детали Машин»
Преподаватель: Гудков В.В.
Студент: Кузин Н.М.
Группа: Э6-51
Волновая зубчатая передача
Волновая передача — это механизм, в котором движение между звеньями передается перемещением волны деформации гибкого звена. Волновая зубчатая передача (ВЗП) содержит: z1 — гибкое колесо с внешними зубьями, выполненное в виде тонкостенного цилиндра, соединенного с тихоходным валом; z2 — жесткое колесо с внутренними зубьями, соединенное с корпусом; h — генератор волн, состоящий из гибкого подшипника, напрессованного на овальный кулачок (рис. 11.32, а), или из двух больших роликов (дисков), расположенных на эксцентриковом валу.
Генератор волн по большой оси Y выполняют больше диаметра выступов зубьев гибкого колеса на величину 2W0, а по малой оси X — меньше этого диаметра. При деформации гибкого колеса во время сборки зубья по большой оси генератора входят в зацепление на полную высоту зуба hd. По малой оси зубья перемещаются на величину W к центру и выходят из зацепления. Между этими участками зубья гибкого колеса погружены во впадины жесткого на разную глубину (рис. 1, б).
Рис. 1 Волновая зубчатая передача: а — конструктивная схема; б — процесс деформации гибкого зубчатого венца; в — перемещения зубьев

Необходимое максимальное радиальное перемещение W0 равно полуразности диаметров делительных окружностей:
W0 = О,5(d2 –d1) = 0,5m(z2-z1). (1)
При разности чисел зубьев z2 – z1 = 2 величина максимальной радиальной деформации
W0 = m. При нарезании колес со смещением величина радиальной деформации находится в пределах 0,94m < W0 < 1,1 m
Цель деформации — получить большое число одновременно зацепляющихся зубьев и повысить нагрузочную способность передачи. Для обеспечения многопарного зацепления выбирают определенной формы кулачок, величину радиальной деформации и геометрию профиля зубьев.
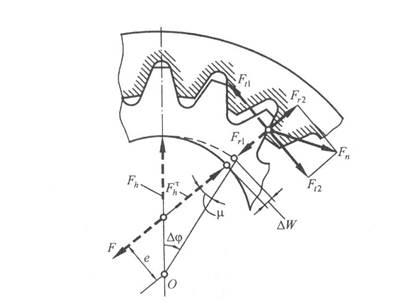
Принцип работы ВЗП можно объяснить на примере силового взаимодействия звеньев (рис. 2). После сборки передачи результирующий вектор сил деформации Fh действует на гибкое колесо по большей оси генератора волн. При повороте генератора волн по часовой стрелке на бесконечно малый угол Δφ вектор результирующих сил поворачивается в ту же сторону, увеличиваясь по модулю (Fht). Зубья гибкого колеса, перемещаясь в радиальном направлении на величину ΔW, давят на зубья жесткого колеса с силой Fn по нормали к их профилю. Эта сила раскладывается на окружную Ft2 и радиальную Fr2. На зуб гибкого колеса действует такая же система сил, но в обратном направлении. Если жесткое колесо закреплено, то под действием сил Ftl гибкое колесо вращается в сторону, обратную вращению генератора. Если закреплено «дно» гибкого колеса (см. рис. 1, а), то под действием сил Ft2 жесткое колесо вращается в сторону вращения генератора волн.
Рассмотрим работу передачи в режиме мультипликатора (ускорителя), когда остановлено «дно» гибкого колеса. При вращении жесткого колеса против часовой стрелки действует система сил в зацеплении, показанная на рис. 2.
На генератор волн в точке контакта по нормали к профилю кулачка давит сила F ≈ Fr1 с плечом е относительно оси вращения О. Момент F*e вращает генератор волн, если угол µ будет больше угла трения.
График радиальных перемещений W точек обода гибкого колеса от угла поворота φ показан на рис. 1, в. Он напоминает волновую функцию. На угол 2π приходится две волны, поэтому передачу называют двухволновой. При вращении генератора волна смещается по контуру гибкого колеса.
При больших передаточных отношениях применяют трехволновые передачи. В этих передачах имеют место большие напряжения изгиба в гибком колесе.
Рис. 11.33. Принцип работы ВЗП
Многопарностъ зацепления определяет все положительные качества этих передач по сравнению с обычными: меньшие массу и габаритные размеры, более высокую кинематическую точность, меньший мертвый ход, меньший шум. Волновые передачи позволяют осуществлять большие передаточные отношения в одной ступени: минимальное — 70 (ограничивается изгибной прочностью гибкого зубчатого венца), максимальное — 300...320 (ограничиваются минимально допустимой величиной модуля, равной 0,2...0,15 мм). При этом КПД равен 85...78 %, как и в планетарных передачах при тех же передаточных отношениях. В режиме мультипликатора КПД 65...55 %.
К недостаткам ВЗП можно отнести сложность изготовления колес мелких модулей (0,15...2 мм), сложность изготовления гибких тонкостенных колес (требуется специальная технологическая оснастка), ограниченные частоты вращения генератора волн из-за возникновения вибраций.
Предельные кратковременные частоты вращения nh (мин-1) при жидком смазочном материале определяют в зависимости от диаметра – d1=mz1 делительной окружности:
d1 <480 мм, nh= 550 + 4,82*105/d1;
d1>480 мм, nh=5,2*105/ d1
При пластичном смазочном материале и непрерывной работе предельные частоты вращения следует уменьшать в 4...5 раз.
Передаточное отношение волновых передач определяется так же, как и для планетарных, по уравнению Виллиса
(n1-nh)/(n2-nh)=u h1.2=z2/z1 (2)
где n1, п2, nh— частоты вращения гибкого, жесткого колес, генератора волн соответственно.
При неподвижном жестком колесе (п2= 0) из уравнения (2) находим nh/n1 делением числителя и знаменателя левой части на n1:
u (2)h.1=nh/n1=-z1/(z2-z1) (3)
Знак минус указывает на разное направление вращения ведущего и ведомого звеньев при закрепленном колесе z2.
Радиальная деформация и передаточное отношение взаимосвязаны. Умножив и разделив на модуль выражение (3), получим
u (2)h.1=\ -z1/(z2-z1) *m/m\=d1/(2W0); W0=d1/(2 u (2)h.1)
Минимальное передаточное отношение ограничивается изгибной прочностью зубчатого гибкого колеса. При d1=const с уменьшением передаточного отношения возрастает потребная величина радиальной деформации и напряжения изгиба.
Например, при u= 80 потребная величина радиальной деформации в 1,25 раза больше, чем при u= 100. Примерно в такой же пропорции увеличатся напряжения изгиба в гибком колесе и понизится допустимый вращающий момент.
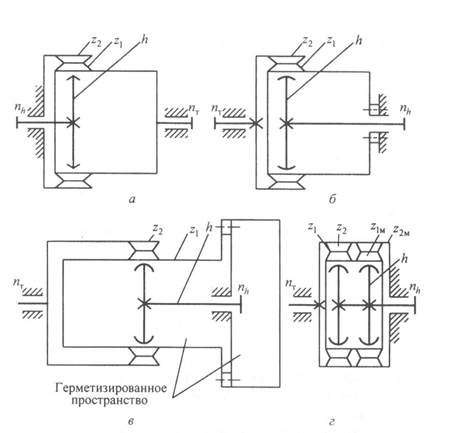
Кинематика передач. Кинематические схемы передач показаны на рис.3. В передаче (рис.3, а) жесткое колесо z2 закреплено. Вращение передается от h к z1. Передаточное отношение определяется по зависимости (3).
Для схем (см. рис.3, б, в) ведущим звеном является генератор волн h, ведомым — жесткое колесо z2, колесо z1 — неподвижно. Тогда передаточное отношение определяется по формуле
u(1)h.2=nh/nт=z2/(z2-z1) (4)
Например, z1 = 200, z2 = 202, передаточные отношения u(2)h.1 =100, u(1)h.2 =101 различаются на единицу.
Схема (см. рис.3, в) используется для передачи движения из герметизированного пространства к жесткому колесу z2 через неподвижное гибкое колесо z1. Используется в космической и вакуумной технике.
Передачу с коротким гибким колесом (рис.3, г) чаще применяют при z1m = z2m = z1, т. е. зацепление z1m, z2m используют как подвижное шлицевое соединение. Тогда передаточное отношение определяют по (3) или (4) и КПД = 0,7...0,8. При этом принимают соответствующие смещения исходного контура колес.
Рациональные значения передаточных отношений для схем (см. рис.3, а-в) лежат в пределах 70<u<320, КПД= 0,85...0,75.
Числа зубьев колес. По условию сборки разность чисел зубьев колес должна быть кратной числу волн nw:
(z2-z1)/nw = Kz,
где Kz = 1 или 2 — коэффициент кратности.
Подставив в (3) значение разности зубьев z2 – z1 = Kznw, получим зависимости для определения чисел зубьев колес
z1=| u(2)h.1 |nwKz;
z2=z1+nwKz
где Kz=1 или 2 – коэффициент кратности.
Рис.3 Кинематические схемы ВЗП
 |
Для двухволновых передач nw=2, Kz=1
z1=2| u(2)h.1 |; z2=z1+2
С увеличением коэффициента кратности Kz увеличиваются числа зубьев колес и уменьшается модуль зацепления m при неизменном делительном диаметре колеса d1=mz1 и неизменной максимальной радиальной деформации W0 = Kzm.
Мелкие модули m < 0,5 мм удорожают изготовление зуборезного инструмента, его долговечность при зубонарезании. Поэтому принимают Kz= 1, а при и <70 Кz > 2
Планетарные передачи
Планетарным называется механизм, состоящий из зубчатых колес, в котором геометрическая ось хотя бы одного из колес подвижна.
Простая планетарная передача (рис.4, а) содержит: za, zb — центральные колеса с внешними и внутренними зубьями, zg — сателлиты с внешними зубьями, которые зацепляются одновременно с za и zb (z — числа зубьев колес, nw — число сателлитов, здесь nw=3), h — водило, на котором расположены оси сателлитов (на рис.4 водило соединено с тихоходным валом).
Принцип работы планетарных передач: при закрепленном колесе zb (wb=0) вращение колеса za (wа) вызывает вращение сателлита zg относительно собственной оси со скоростью wg. Качение сателлита по zb перемещает его ось и вращает водило со скоростью wh.
Сателлит совершает вращение относительно водила со скоростью (wgh = wg - wh и вместе с водилом (переносное движение).
Его движения напоминают движения планет, поэтому передача называется планетарной.
Основными звеньями планетарной передачи называют такие, которые воспринимают внешние моменты и вращаются вокруг оси водила. На рис. 4, а основные звенья — za, zb, h, т. е. два центральных колеса (2К) и водило (h), которое сокращенно обозначают 2К-h [26]. Внешние моменты: Та — на ведущем валу, Th — на ведомом (тихоходном) валу, Ть — на колесе zb, соединенном с корпусом.
Любое основное звено планетарной передачи может быть остановлено.
Дифференциальной называют передачу, в которой все основные звенья подвижны. При этом можно суммировать движение двух звеньев на одном или раскладывать движение одного звена на два остальных.
 На рис.4, в показано суммирование движений звена za (двигатель Д1) и звена zь (двигатель Д2) на водиле h. Между двигателем Д2 и колесом zb поставлена дополнительная передача z1, z2, чтобы получить необходимый вращающий момент на колесе zb (см. ниже). Такую схему применяют в системах автоматического управления.
На рис.4, в показано суммирование движений звена za (двигатель Д1) и звена zь (двигатель Д2) на водиле h. Между двигателем Д2 и колесом zb поставлена дополнительная передача z1, z2, чтобы получить необходимый вращающий момент на колесе zb (см. ниже). Такую схему применяют в системах автоматического управления.
 Рис.4 Планетарные передачи
Рис.4 Планетарные передачи
На рис. 4, г показан дифференциал заднего моста автомобиля, выполненный по схеме рис. 4, а, но с коническим колесом (za, zb — два центральных колеса, h — водило, в котором размещены оси сателлитов zg). Водило получает вращение от конической передачи z1, z2. Здесь вращение водила h раскладывается между колесами za и zb обратно пропорционально моментам сопротивлений, например при повороте автомобиля. Это облегчает управление машиной и уменьшает износ покрышек. При одинаковых моментах сопротивления на колесах все зубчатые колеса дифференциала вместе с водилом вращаются как одно целое.
Планетарные передачи по сравнению с обычными имеют преимущества: меньшие габариты и массу, так как вращающий момент передается по нескольким потокам (сателлитам). В некоторых схемах можно получить большие передаточные отношения при малом числе колес. Нужно помнить, что с увеличением передаточного числа КПД уменьшается.
К недостаткам передач можно отнести: необходимость повышенной точности изготовления, большое число подшипников качения, наличие долбяка для нарезания колес с внутренними зубьями (необходимость использования), так как долбяк меняет размеры при переточках.
Наиболее распространенные схемы передач представлены в табл.1
Схема 1 — одноступенчатая передача (2K-h — два центральных колеса и водило), наиболее распространена, так как имеет высокий КПД и технологичную конструкцию. Наибольшее
передаточное отношение одной ступени ubah= 9... 12 для za =12...24. Для передаточных отношений и > 16 соединяют последовательно две или больше передач. Тогда общее передаточное отношение редуктора равно произведению последовательно соединенных:
uр=u1u2…un (5)
 Таблица 1
Таблица 1
После распределения передаточного отношения между ступенями каждую ступень рассчитывают отдельно.
Схема 2 (2K-h). Имеет высокий КПД, сравнимый с КПД схемы 1, но более сложное по конструкции водило, так как у сателлита два зубчатых колеса zg, zf с большой разницей диаметров. Оптимальные передаточные отношения u = 9... 17. При этом масса редуктора меньше массы двухступенчатого по схеме 1.
Схема 3 (2K-h) позволяет получить большие передаточные отношения в одной ступени (до 10000 при четырех колесах и с малой разностью чисел зубьев зацепляющихся колес). Однако с увеличением передаточного отношения резко падает КПД и плавность вращения тихоходного вала (из-за ошибок изготовления по шагу возможны кратковременные остановки вала). Эта передача требует высокой степени точности изготовления колес.
Недостатком схемы является также высокая нагруженность подшипников сателлитов. Относительная частота вращения колец подшипника соответствует частоте вращения быстроходного вала, а нагрузка на них соответствует нагрузке тихоходного звена.
Схема 4 (K-h-V) — имеет основные звенья: одно центральное колесо zb, водило h (ведущее), вал V. Механизм W служит для передачи вращения с эксцентрично расположенного сателлита на вал V.
В схеме 4 разность зубьев колес мала. Поэтому контактные напряжения в зацеплении малы и размеры передачи определяют из условия выносливости зубьев на изгиб. Чтобы сократить размер передачи, применяют вместо эвольвентного цевочное зацепление колес. Профиль зубьев (циклоиду) выбирают так, чтобы в одновременном зацеплении участвовало много цевок (втулок на осях). Нагрузочная способность обычно лимитируется подшипником сателлита zg, так как высокая частота вращения сочетается с большими нагрузками от тихоходного звена.
При высокой точности изготовления редуктор работает бесшумно с высоким КПД и имеет габариты, соответствующие волновой зубчатой передаче, но при этом имеет большую массу.
Кинематика планетарных передач. Передаточное отношение обозначают буквой с индексами, например uahb. Нижние индексы — направление передачи движения, верхний — неподвижное звено, относительно которого рассматривается движение.

 Для определения передаточного отношения рассмотрим дифференциальный механизм, у которого основные звенья имеют положительные угловые скорости wа, wb, wh (см. рис. 4, а). Сообщим мысленно механизму скорость wh. Тогда звенья будут иметь скорости wа-wh; wb-wh; wh-wh=0. Водило неподвижно. Такой механизм называют обращенным. Для него передаточное отношение в соответствии с формулой Виллиса имеет вид:
Для определения передаточного отношения рассмотрим дифференциальный механизм, у которого основные звенья имеют положительные угловые скорости wа, wb, wh (см. рис. 4, а). Сообщим мысленно механизму скорость wh. Тогда звенья будут иметь скорости wа-wh; wb-wh; wh-wh=0. Водило неподвижно. Такой механизм называют обращенным. Для него передаточное отношение в соответствии с формулой Виллиса имеет вид:
Где n- частота вращения основных звеньев, w=πn/30
Передаточное отношение uhab =(-wa/wg)(wg/wb) имеет
 знак минус для внешнего зацепления (разное направление угловых скоростей) и плюс — для внутреннего (рис. 4, а):
знак минус для внешнего зацепления (разное направление угловых скоростей) и плюс — для внутреннего (рис. 4, а):
Схема 1 (табл. 1). Остановлено колесо b (wb=0).
 |
Закреплено колесо а (wa=0) определяем.
|

С х е м а 2 (табл. 1). wb = 0, uabh = (zb/zf)(-zg/za)

|
Формулы для определения передаточных отношений для передач, выполненных по другим схемам, приведены в табл. 1.
КПД планетарных передач. Потери мощности складываются из потерь на трение в зацеплениях и подшипниках сателлитов, на размешивание масла (гидравлические). При больших скоростях водила учитывают аэродинамические потери
η р=ηз ηг η а (6)
где η р — КПД редуктора; ηз — потери в зацеплении и в опорах сателлитов; ηг — гидравлические потери; η а — аэродинамические потери.
Потери мощности на трение в зацеплении и опорах сателлитов зависят только от скорости относительно водила. Например, для схемы 1 (табл. 1)
Ртр = Ттр (wa -wh) = Ta (wа - wh)ψh
где Ртр — мощность трения; ψh — коэффициент потерь; Ттр = Ta ψh — момент трения.
 Полная подводимая мощность на ведущем звене Ра = Таwа. Подставляя Ртр и Ра в известную зависимость.
Полная подводимая мощность на ведущем звене Ра = Таwа. Подставляя Ртр и Ра в известную зависимость.
 |
Где коэффициент потерь ψh для обобщенного механизма
 |