Лекция 4
Общие сведения о приводах электрических аппаратов. Перемещение подвижных частей аппарата осуществляется под действием привода. Различают непосредственные и косвенные приводы, индивидуальные и групповые.
В непосредственном приводе сила к подвижной части аппарата прикладывается машинистом с помощью рукоятки или педали. Непосредственный (ручной) привод имеют кнопки, разъединители, рубильники и другие аппараты, рассчитанные на малые токи и напряжения или переключаемые без тока.
Непосредственный привод имеют контроллеры машиниста, используемые на э. п. с. с косвенной системой управления. Силовые контроллеры, рассчитанные на относительно большие токи и напряжения, как правило, выполняют с косвенным приводом. Косвенный привод имеют также индивидуальные контакторы и реле.
Наиболее распространены следующие виды косвенного привода:
электромагнитный, электропневматический и электродвигательный.
Воздействие от привода может быть передано на систему подвижных контактов одного аппарата, совершающих только одну операцию (индивидуальный привод), либо на группу коммутирующих элементов, действующих в определенной последовательности или одновременно (групповой привод). Косвенные индивидуальные приводы выполняют большей частью электромагнитными или электропневматическими, а групповые — электропневматическими или электродвигательными.
В электромагнитном приводе используется сила притяжения якоря к сердечнику электромагнита или сила, перемещающая якорь внутри сердечника против усилия сжимающейся или растягивающейся пружины. В тяговых аппаратах различают электромагниты с замкнутым (рис. 4.1, а) и разомкнутым (рис. 4.1, б) магнитопроводами. Наибольшее распространение получили аппараты с замкнутым магнитопроводом и поворотным якорем (см. рис. 4.1, а), так как при разомкнутой магнитной системе требуется относительно большая м. д. с. для формирования потока в системе с большим сопротивлением воздушного промежутка.

Рисунок 4.1
Электромагнитный привод применяют не только для перемещения подвижных контактов, но и для других целей. Так, в некоторых аппаратах используется механизм свободного расцепления, удерживающая защелка которого освобождается электромагнитом.
Статические характеристики. Зависимость силы тяги электромагнита QM или момента Μ от магнитодвижущей силы F при постоянном воздушном зазоре между якорем и ярмом δ (в замкнутых магнитопроводах), постоянном смещении х оси сердечника ОсО'с от оси катушки ОкО'к (в разомкнутых магнитопроводах) и неизменной м. д. с. его обмотки называют нагрузочной характеристикой, а зависимость QM или Μ от δ или х при постоянном м. д. с. F — статической характеристикой электромагнита. Для построения статических характеристик электромагнита с поворотным якорем необходимо установить количественную связь между силой тяги электромагнита, намагничивающей силой и воздушным зазором δ.
Допустим, что катушка электромагнита получает питание от постороннего источника напряжения U0. При включении тока
 (4.1)
(4.1)
где w — число витков катушки; Φ — магнитный поток.
Умножим обе части равенства (4.1) на idt. В результате интегрирования получим

Здесь правая часть — энергия, полученная магнитным полем до достижения установившегося магнитного потока Фу за время t, т. е. подводимая от источника питания за вычетом потерь в сопротивлении цепи.
Рисунок 4.2
Действие электромагнитного привода можно разделить на два этапа: нарастание тока до начала перемещения якоря и перемещение якоря электромагнита. Зависимость Φ (F) при неподвижном якоре до его притяжения изображена кривой Оа (рис. 4.2, а). По окончании 1-го этапа в точке а магнитная энергия Wм1 может быть получена в результате графического интегрирования функции F(Ф).
 (4.2)
(4.2)
где Φ1 — магнитный поток в конце 1-го этапа в момент начала перемещения якоря;
S0ab — площадь, ограниченная кривой Оа и осью ординат; mF, т ф — масштабы м. д. с. и магнитного потока.
В процессе перемещения якоря (на 2-м этапе) происходит увеличение магнитного потока от Ф1 до Ф2 вследствие уменьшения воздушного зазора. Характер изменения Ф(F) в процессе перемещения якоря зависит от того, завершилось ли нарастание тока в катушке до начала перемещения или нет. Зависимость Φ (F) при перемещении якоря условно изображена кривой ас на рис. 4.2, а.
На 2-м этапе к катушке электромагнита будет подведена магнитная энергия
 (4.3)
(4.3)
С другой стороны, если бы магнитный поток возрастал при неподвижном притянутом якоре, магнитная энергия поля определялась бы равенством:
 (4.4)
(4.4)
Следовательно, одна и та же точка с, которой соответствует магнитный поток Ф2, может быть достигнута при перемещении якоря (путь Оас) и при неподвижном заранее притянутом якоре (кривая Ос).
Разность между магнитной энергией, подводимой в течение первых двух этапов, и потенциальной магнитной энергией, определяемой выражением (4.4), соответствует механической энергии, затрачиваемой на перемещение якоря:
 (4.5)
(4.5)
где QM — сила тяги электромагнита, меняющаяся при изменении δ.
Согласно рис. 4.2, а работа перемещения якоря пропорциональна заштрихованной площади SОac-
Зависимость QM(δ) может быть получена графическим построением, если разбить площадь SОac на элементарные площадки для малых значений Δδ. Для каждой элементарной площади ΔА при заданном среднем значении зазора δг + Δδ/2 можно по выражению (4.5) определить силу тяги QM.
Силы сопротивления электромагнитного привода. Пригодность магнитной системы для данного аппарата можно определить, сопоставляя диаграмму сил сопротивления подвижной системы, которые привод должен преодолеть, с тяговой характеристикой электромагнита. Диаграмма сил может иметь различный вид в зависимости от характеристик пружин, их предварительного натяжения, числа и типа блокировочных и силовых контактов.

Рисунок 4.3
Рассмотрим наиболее распространенную систему электромагнитного привода (рис. 4.3), состоящую из Г-образного ярма 1, сердечника 2 с катушкой 3 и поворотного якоря 4, шарнирно соединенного с ярмом валиком или призматическим шарниром в точке 0. К якорю присоединена возвращающая пружина 7. Держатель подвижного контакта 5 присоединен к якорю 4 с помощью притирающей пружины 6. Подобная магнитная система может обеспечить достаточно большую силу притяжения якоря благодаря замкнутой магнитной цепи и малой длине силовых линий в воздушных зазорах. На рис. 4.3, а показано положение подвижной системы привода при выключенной катушке электромагнита, на рис. 4.3, б — в момент касания контактов и на рис. 4.3, в —после их полного включения. Силы сопротивления подвижной системы складываются из приведенных к плечу l силы QM относительно оси поворота О, веса G подвижной системы, натяжения Qn возвращающей пружины, которое зависит от ее характеристики, и силы нажатия контактов QK (после их замыкания), определяемой натяжением притирающей пружины. К ним добавляется также сила реакции блокировочных пальцев (если они используются). Результирующая сила сопротивления Qc, приведенная к оси действия силы QM, определяется как сумма моментов ее составляющих, отнесенная к плечу l. Следовательно, согласно рис. 4.3, в, получим

(4.6)
где Gʹ, Qʹп, Qʹk — силы сопротивления, приведенные к плечу l.

Рисунок 4.4
Сила Qʹc изображена ломаной линией 1-3-4-5 на рис. 4.4. В процессе движения якоря вверх до замыкания контактов (см. рис. 4.3, б) привод должен преодолевать только силы возвращающей пружины и веса. При зазоре δ3 происходит соприкосновение контактов и результирующее усилие возрастает скачком на значение начальной силы нажатия контактов QK, которая определяется предварительным натяжением притирающей пружины.
Магнитный поток формируется с помощью катушек электромагнитов. Приводы электромагнитных реле часто выполняют с несколькими катушками, м. д. с. которых могут складываться или вычитаться.
Катушка А на рис. 4.3 размещена ближе к зазору, чем катушка Б. Характеристики ее располагаются выше, чем характеристики катушки Б. Характеристика катушки, распределенной на все обмоточное пространство, занимает среднее положение. Это следует учитывать при многообмоточных реле, срабатывающих под действием суммы или разности м. д. с. обмоток.
Условия срабатывания электромагнитного привода. Если характеристика QM(δ) представлена кривой 1, соответствующей м, д. с. F1, то привод сработает при δ < δ1 и QM > G'+Qʹп+Qк (рис. 4.4). Следовательно, упор, фиксирующий якорь в выключенном положении, должен быть установлен так, чтобы неравенство δ<δ1 было выполнено. При этом раствор контактов (см. рис. 4.3, а) будет:

Увеличение м. д. с. катушки позволяет повысить начальный зазор δ1 и раствор контактов; уменьшение м. д. с. ограничивается минимальным значением, при котором нарушается правильная работа привода. Например, в случае характеристики // при F2<F1 (см. рис. 4.4) привод начинает действовать при зазоре δ2, однако после соприкосновения контактов движение якоря прекращается, т. е. притирания контактов и повышения их нажатия не происходит.
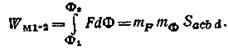
В электромагните с разомкнутой магнитной цепью поток Φ замыкается через воздух и сердечник якоря (рис. 4.5, а). Сила тяги QM при этом образуется в результате продольного натяжения линий магнитного поля и их стремления к уменьшению. При симметричном расположении магнитного сердечника относительно торцов катушки магнитное сопротивление становится минимальным и сила тяги приближается к нулю. В случае отклонения сердечника от этого положения в любом направлении магнитное сопротивление будет увеличиваться, а стремление магнитных силовых линий расположиться по кратчайшим расстояниям вызовет появление силы QM, действующей против сил сопротивления Qc. Если сердечник значительно удален от средней линии катушки, сила притяжения уменьшается до нуля.
Тяговые характеристики QM (δ) описанной системы привода для F1 <.F2 <F3 показаны на рис. 4.5, б. С увеличением F уменьшается перемещение х, при котором реализуется одна и та же сила QM (см. рис. 4.5, а, где х3 <х2 <х1)·
Один из характерных показателей работы электромагнитного привода — коэффициент возврата, представляющий собой отношение м. д. с. отпадания якоря к м. д. с. его притяжения. 
Рисунок 4.5