Принцип действия кулачкового контактора. Групповые контакторы приводятся в действие с помощью кулачкового вала и укрепленных на нем шайб. Конфигурация каждой кулачковой шайбы — чередование выступов и впадин — должна соответствовать выбранным углам поворота вала при замкнутом и разомкнутом состояниях контактора. По поверхности каждой шайбы катится ролик, связанный с механизмом включения (выключения) контактора.

Рисунок 5.5
Кулачковые контакторы могут замыкать свои контакты при набегании ролика на выступающую часть шайбы и размыкать при переходе его на впадину или, наоборот, замыкать контакты, когда ролик находится против впадины, и размыкать, когда он находится против выступа. В аппаратах отечественного э. п. с. наиболее широко применяют контакторы второго вида. Кинематическая схема рис. 5.5 поясняет принцип действия такого кулачкового контактора.
На изоляционном основании 5 укреплены неподвижный контакт 3 и кронштейн 6, на который опирается включающая пружина 7. Верхний конец пружины упирается в подвижной рычаг 8; на нем укреплен ролик 9, катящийся по поверхности кулачковой шайбы 10. Ролик на рис. 5.5 показан в положении перехода на выступающую часть шайбы с осью О3. На конце рычага 8 укреплен поворотный кронштейн 1 — держатель подвижного контакта 2. Подвижной контакт удерживает во включенном положении контактная (притирающая) пружина 11.
При вращении шайбы против часовой стрелки (как показано стрелкой) ролик перекатывается на ее выступ и рычаг 8 поворачивается по часовой стрелке, сжимая включающую пружину 7. Конец рычага 8 поднимается, пока своим упором 4 не коснется кронштейна 1, который начнет поворачиваться, сжимая пружину 11. В результате этого подвижной контакт начнет отходить от неподвижного. При переходе ролика на впадину шайбы включающая пружина 7 возвратит рычаг 8 в положение, показанное на рис. 5.5, и контакты вновь замкнутся.
На рис. 5.5 показаны силы, действующие в процессе размыкания контактов кулачкового контактора. Равновесие рычага 8 определяется равенством моментов сил, взятых относительно осей 01, 02 и 03. При качении ролика по поверхности шайбы на него действует сила реакции Q3 = — Q6, направленная перпендикулярно поверхности касания. В положении равновесия
 (5.2)
(5.2)
где Q1 — сила включающей пружины;
QK — сила нажатия контактов; по условию равновесия рычага 1 она равна Q6l1/l2;
Q6 — сила нажатия контактной пружины.
В направлении, обратном перемещению шайбы, действует приведенная к поверхности касания сила трения между роликом и валом:
 (5.3)
(5.3)
где φт — коэффициент трения (для пары сталь—сталь φт = 0,15);
R и r — соответственно радиус ролика и его вала.
Момент сопротивления кулачкового вала при выключении контактора
 (5.4)
(5.4)
При симметричном профиле сбегающего и набегающего краев шайбы в процессе включения изменится знак плеча силы. Следовательно,
Мс = - Q3le + Q4l7.
Поскольку первый член правой части этих равенств обычно значительно больше второго, момент сопротивления имеет разные знаки в процессах включения и выключения.
На рис. 5.6 показана зависимость момента сопротивления Мс от угла α поворотов вала при накатывании ролика на выступ кулачковой шайбы, т. е. в процессе выключения. После выхода ролика на окружность шайбы и достижении угла α1 момент сопротивления резко снижается до установившегося значения Мсу, так как при изменившемся направлении силы Q3, перпендикулярной к окружности выступа шайбы 11 (см. рис. 5.5), ее плечо уменьшится. Форма кривой Мс(α) в значительной мере зависит от профиля шайбы и закономерности изменения сил сопротивления. При плавном профиле шайбы максимальное значение момента снизится от Мс mах до М'с mах, но увеличится необходимый угол перемещения вала с αг до ά1 и уменьшится число позиций, которое можно получить в пределах одного поворота вала.

Рисунок 5.6
Помимо моментов сил сопротивления, вызываемых взаимодействием механизма кулачковых контакторов с шайбами кулачкового вала, на групповой вал в заключительной стадии поворота к фиксированной позиции действуют также моменты сил, вызванных различными устройствами фиксации, обеспечивающими установку вала в этой позиции. Механизмы фиксации имеют различное исполнение в зависимости от вида привода и требований к нему. Для групповых контроллеров с непосредственным управлением применяют зубчатые шестерни с пружинным фиксатором.
Полный момент сопротивления групповых контакторов можно получить, суммируя кривые моментов сопротивления отдельных кулачковых контакторов при одинаковых углах поворота. Чтобы уменьшить максимальный момент группового привода, следует избегать одновременного включения и выключения нескольких контакторов, иначе будут суммироваться несколько максимальных значений при одинаковых углах поворота. Вращающий момент, приложенный к кулачковому валу, должен превышать суммарный момент сил сопротивления (на 15—20%), а момент силы, фиксирующей привод, — максимальное значение момента сопротивления при подходе к фиксированной позиции.
По конструктивному исполнению различают косвенные групповые приводы малопозиционных (например, двух- и трехпозиционных) и многопозиционных аппаратов. Для групповых аппаратов в качестве косвенного применяют преимущественно электропневматический и электродвигательный приводы.
Электропневматические приводы групповых контакторов. Двухпозиционный электропневматический групповой привод может, как и индивидуальный, иметь два положения, соответствующих наличию давления сжатого воздуха (подача воздуха) и его отсутствию (прекращению подачи).
Многие двухпозиционные аппараты — реверсоры, тормозные переключатели и другие аппараты, не переключающиеся под током, — обычно выполняют без дугогашения, чтобы уменьшить их габариты и снизить стоимость. В этом случае требуется привод, который при перерывах питания катушек вентилей или прекращении подачи сжатого воздуха сохранял бы свое положение.
Простейший двухпозиционный привод состоит из двух поршней, соединенных общим штоком и управляемых двумя вентилями включающего типа: по одному со стороны каждого поршня. При возбуждении одного из вентилей поршни переходят в одно из крайних положений. Движение поршней передается валу аппарата через механизм с водилом 1 (рис. 5.7, а) или зубчатой передачей 2 (рис. 5.7, б). Механизм первого типа применяют при малых, а второго — при значительных углах поворота вала.
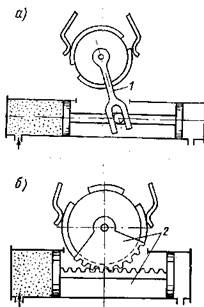
Рисунок 5.7
Двухпозиционные приводы групповых контакторов с дугогашением выполняют с вентилем включающего и вентилем выключающего типов. Такой привод при невозбужденных вентилях занимает одно положение, а при возбуждении обоих вентилей переходит в другое. Подобную систему имеют, например, двухпозиционные переключатели (реверсоры и тормозные переключатели) электровоза ВЛ10. За последнее время были разработаны двухпозиционные групповые диафрагменные приводы.
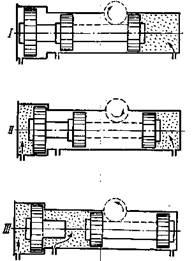
Рисунок 5.8
Примером трехпозиционного может служить пневматический привод группового переключателя электровозов ВЛ23. Этот привод имеет три фиксированных положения вала, соответствующих последовательному, последовательно-параллельному и параллельному соединениям двигателей (рис. 5.8). Фиксация здесь достигается применением трех поршней: двух одинакового диаметра, связанных зубчатой рейкой, и третьего свободного поршня большего диаметра. В позиции / вала сжатый воздух подается в правую часть цилиндра и два жестко связанных поршня находятся в крайнем левом положении. В позиции // сжатый воздух поступает в правую и левую части цилиндра, но преобладает давление на поршень, имеющий большую площадь, который занимает крайнее правое положение; два других поршня займут среднее положение. В позиции /// сжатый воздух подается в среднюю часть цилиндра, а правая часть цилиндра соединяется с атмосферой; сдвоенные поршни перемещаются в правую часть цилиндра.
На рис. 5.9 показана кинематическая схема многопозиционного привода с четырьмя цилиндрами. Движение поршней цилиндров передается шатунами коленчатому валу, который с помощью зубчатой передачи вращает кулачковый вал группового контроллера.

Рисунок 5.9
Управляют приводом два сдвоенных электромагнитных вентиля, в каждом из которых конструктивно объединены клапаны включающего ВВ и выключающего ВКВ вентилей с общим электромагнитом. Когда оба вентиля не возбуждены, сжатый воздух через клапанные системы выключающих вентилей поступает в цилиндры А и В и вал привода поворачивается в положение, изображенное на рис. 5.9, а (1-я позиция). Если возбудить вентиль /, то сжатый воздух выйдет из цилиндра А и войдет в цилиндр С, поршень которого переместит коленчатый вал в положение, показанное на рис. 5.9, б (2-я позиция). Если при возбужденном вентиле / возбудить также вентиль /У, то сжатый воздух выйдет из цилиндра В и войдет в цилиндр D, а вал перейдет в поло-жени показанное на рис. 5.9, в (3-я позиция). После выключения вентиля / при возбужденном вентиле // вал переходит в положение, изображенное на рис. 5.9, г (4-я позиция). Когда вентиль // будет выключен, вал возвратится в исходное положение (см. рис. 5.9, а).
На электровозах ЧС1 и ЧС2 применена описанная система привода, но цилиндры в ней расположены не звездо- (см. рис. 5.9, а), а V-образно (рис. 5.9, д и е). Иначе выполнен и коленчатый вал. В первом случае кривошипы не имеют углового смещения друг относительно друга и на схеме рис. 5.9, а совмещены в точке 01. При V-образном расположении цилиндров необходимо смещение двух кривошипов по отношению к двум другим на 180° (точки 01 и 02 на рис. 5.9, д, е).
Важным достоинством приводов с коленчатым валом является их реверсивность, т. е. способность работать в обоих направлениях вращения.