Ни один из существующих в природе материалов не является абсолютно твердым. Под действием внешних сил все тела в большей или меньшей мере меняют свою форму (деформируются). Томки тела меняют свое положение в пространстве непрерывно.
Первоначально непрерывно распределенный материал не содержит после деформации разрывов и пустот (т. е. не возникает трещин).
Вектор u имеющий начало в точке А недеформированного тела, а конец – в соответствующей точке A’ деформированного, называется вектором полного перемещения точки (рис. 1.10). Его проекции на оси координат

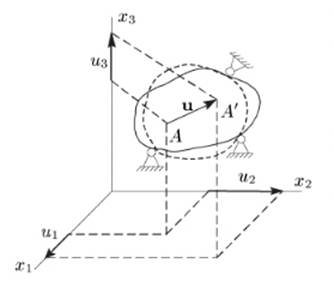
Рис. 1.10
Как правило, в механике деформируемого твердого тела рассматриваются кинематически неизменяемые системы, т. е. не допускающие перемещения тела в пространстве как жесткого целого. В противном случае in перемещений всех точек исключается составляющая такого переноса. Введенные таким образом перемещения для большинства рассматриваемых систем являются малыми по сравнению с геометрическими размерами тела.
Метод определения деформаций заключается в том, что по перемещениям вычисляются изменения длин линейных элементов, а также изменение углов между двумя линейными элементами. Для того чтобы связать перемещения точки А и деформации в ее окрестности, рассмотрим вначале плоскую задачу, т. е. примем, что

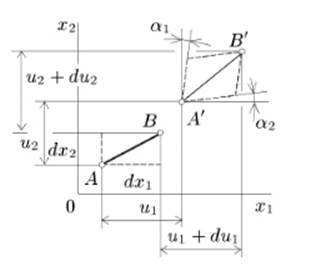
Рис.1.11
В процессе деформации отрезок AB с проекциями dx1, dx2 займет положение A'В' (рис. 1.11). Полное перемещение точки A вдоль оси х1 есть и1. Точка В переместится вместе с точкой A на величину u1 плюс дополнительное перемещение du1 за счет деформации отрезка вдоль оси х1.
Так как приращение перемещения мало и du1 = du1 х1, х2), то с точностью до членов более высокого порядка малости

Здесь первое слагаемое соответствует удлинению составляющей dx1 вдоль оси x1. Второе слагаемое, в силу малости деформаций, описывает перемещение за счет поворота отрезка относительно оси х2 на угол α1:
Рассматривая перемещение точки В вдоль оси х2, по аналогии получаем


Величины, описывающие линейные удлинения вдоль осей, называются линейными деформациями и обозначаются через

Для описания сдвиговые деформаций используют величину, равную половине суммарного изменения прямого угла между осями координат:

Если деформирование окрестности точки А является пространственным  , то приращение перемещения будет
, то приращение перемещения будет

и добавляются деформации

В результате получаем, что в общем случае компоненты деформации связаны с малыми перемещениями  формулами, которые называют соотношениями Коти:
формулами, которые называют соотношениями Коти:
 (1.27)
(1.27)
Замечание 1. В случае конечных деформаций (геометрически нелинейная теория упругости), когда сопоставимы  и
и  компоненты тензора деформаций связаны с перемещениями следующими соотношениями:
компоненты тензора деформаций связаны с перемещениями следующими соотношениями:

Замечание 2. В задачах изгиба поперечной нагрузкой мембран и тонких пластин могут быть конечными только прогибы, тогда сопоставимы только  и
и  . Соотношения связи деформаций с перемещениями принимают вид
. Соотношения связи деформаций с перемещениями принимают вид

Компоненты деформаций (1.27) образуют тензор второго ранга, который, как и тензор напряжений, симметричен ( ). Можно показать, что с его помощью полностью описывается деформирование произвольного волокна в окрестности рассматриваемой точки.
). Можно показать, что с его помощью полностью описывается деформирование произвольного волокна в окрестности рассматриваемой точки.