Трансформаторные преобразователи (взаимоиндуктивные) представляют собой устройства, в которых входное перемещение изменяет величину индуктивной связи между двумя системами обмоток, одна из которых (первичная) питается переменным током, с другой (вторичной) снимается выходной сигнал.
Эффективное значение ЭДС, наводимой во вторичной обмотке потоком первичной обмотки, равно
Е2 = wФмω, (9)
где w = 2 πf – угловая частота питающего тока;
ω – число витков;
Фм – амплитудное значение магнитного потока, пронизывающего выходную (вторичную) обмотку, Вб.
Е = f (Х) – функция преобразования трансформаторного преобразователя.
Полный расчет рассмотрен в п. 4.2.1.
Во всех трансформаторных датчиках обмотки ω1 и ω2 взаимозаменяемы, т. е. питание может быть подведено к обмотке ω2, а выходной сигнал снят с обмотки ω1. При этом следует учитывать величины магнитных потоков в отдельных частях магнитопровода и выбрать соответствующие сечения последних [6].
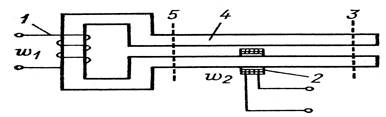
Рис. 4.5. Трансформаторный преобразователь для измерения
больших линейных перемещений
Преобразователь (рис. 4.5) состоит из магнитопровода 4 с рабочей частью в виде двух параллельных полос, обмотки 1 возбуждения и подвижной обмотки 2. При перемещении обмотки 2 от положения 3 до положения 5 индуктированная в обмотке 2 ЭДС возрастает, зависимость приращения ЭДС от перемещения обмотки 2 оказывается практически линейной.
Достоинства: возможность измерения больших линейных перемещений. Недостатки: такие, как и у индуктивного преобразователя.
Трансформаторные датчики применяются в тех же областях, что и индуктивные. Их преимущества перед последними – отсутствие необходимости в использовании измерительных схем, отсутствие гальванической связи между цепями выхода и питания [5].
Дифференциальные трансформаторные преобразователи
Дифференциальный трансформаторный преобразователь получил особо широкое применение. Электрическая схема преобразователя с подвижным сердечником, перемещающимся относительно обмоток приведена на рис. 4.6.

Рис. 4.6. Дифференциальный трансформаторный преобразователь
Первичная обмотка 1 состоит из двух секций, намотанных согласно, а вторичная обмотка состоит из секций 3 и 4, включенных встречно. Подвижный сердечник 2 соединен с чувствительным элементом, на который воздействует измеряемая физическая величина (перемещение, давление).
Магнитный поток от первичной обмотки индуктирует в секциях вторичной обмотки ЭДС е1 и е2, значение которых зависит от величины тока обмотки 1, его частоты и взаимных индуктивностей М1 и М2 между секциями 3 и 4 и первичной обмотки. При среднем (нейтральном) положении сердечника взаимные индуктивности М1 и М2 равны. При отклонении сердечника вверх или вниз от нейтрального положения значение одной из взаимных индуктивностей увеличивается, а другой – уменьшается.
ЭДС на выходе определяется по формуле
е = j · ω · I · М, (10)
где ω = 2πf (f – частота питания);
I – ток питания первичной обмотки преобразователя.
М = М1 – М2 – взаимная индуктивность между выходной и первичной обмотками, зависящая от положения сердечника в катушке преобразователя.
Достоинства: высокая точность, температурная компенсация, знакочувствительность, отсутствие необходимости в использовании измерительных схем, отсутствие гальванической связи между цепями выхода и питания. Недостатки: неточность изготовления.