ОТЧЕТ
по лабораторной работе № 4
«РАСЧЕТ СИСТЕМЫАВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ»
Вариант 12
Студенты: Полекшанов В.В.
Группа: НМТ-462206
Преподаватель: Девятых Е.А.
Екатеринбург
Цель работы
Рассчитать систему автоматического управления параметром.
Последовательность выполнения работы
1. Выбрать закон управления и рассчитать его настройки.
2. Рассчитать частотные характеристики и логарифмические частотные характеристики объекта управления, устройства управления, разомкнутой и замкнутой систем.
3. Определить устойчивость замкнутой системы по критерию Найквиста и корням характеристического уравнения.
4. Рассчитать переходный процесс замкнутой системы и определить прямые показатели качества управления (максимальное динамическое отклонение регулируемого параметра, время регулирования, статическая ошибка регулирования).
Исходные данные для выполнения работы
1. Максимальное заданное динамическое отклонение регулируемого параметра 
2. Статическая ошибка регулирования 
3. Время регулирования 
4. Перерегулирование П
5. Ступенчатое изменение входного параметра 
6. Параметры объекта управления: Коб, Tоб, tоб
В качестве передаточной функции объекта управления взять последовательное соединение инерционного звена первого порядка и звена чистого запаздывания:
 (1.1)
(1.1)
где Коб – коэффициент передачи объекта;
Тоб – постоянная времени (мера инерции объекта);
tзап – время запаздывания.
Цель работы: согласно требованиям по качеству регулирования, выбрать соответствующий регулятор и рассчитать параметры его настройки
Исходные данные для расчета
| Регулируемая величина X, единица ее измерения и предел | Параметры объекта управления | Предельные показатели регулирования | Изм-ие входного парам-а | |||||
| Коб | Tоб | tоб | 
| 
| 
| П | 
| |
| Давление в трубопроводе P=0,1 Мпа | 0,4 | 0,2 |
Полагаем, что система автоматического регулирования является статической, т.к. присутствует статистическая ошибка.
1. Выбор закона управления регулятора и определение его настроек.
Для выбора закона управления используется коэффициент динамического регулирования  , который характеризует эффективность работы регулятора по максимальному динамическому отклонению параметра и является безразмерной величиной.
, который характеризует эффективность работы регулятора по максимальному динамическому отклонению параметра и является безразмерной величиной.
По отношению  выбираем тип регулятора – непрерывный.
выбираем тип регулятора – непрерывный.
По рисунку 1 один выбираем соответствующий тип регулятора по условию обеспечения 20-процентного перерегулирования.
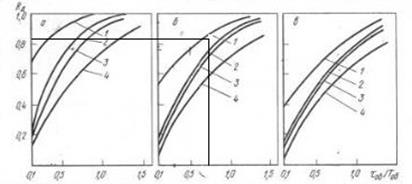
Рисунок 1 – Динамические характеристики регулирования на статических объектах
Первоначально выбираем П-регулятор при перерегулировании П=20%. Затем проверим, соответствует ли время регулирования заданному значению (см. рисунок 2). Отношение  =
=  8,571
8,571
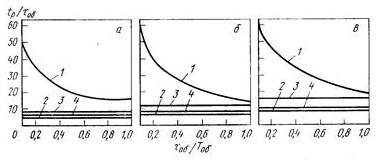
Рисунок 2 – Время регулирования на статических объектах
Анализируя данные графики, приходим к выводу, что единственными подходящим по времени регулирования и соответствующим условию  являются П- и ПИД-регулятор.
являются П- и ПИД-регулятор.
Время регулирования ПИД-регулятора:
 с
с
Время регулирования ПИД-регулятора:
 с
с
Определим статистическую ошибку П-регулятора:

Т.к.  >
>  (0,6>0,2), приходим к выводу, что данный регулятор не отвечает заданным требованиям. Следовательно, выбираем ПИД-регулятор.
(0,6>0,2), приходим к выводу, что данный регулятор не отвечает заданным требованиям. Следовательно, выбираем ПИД-регулятор.
Настройки ПИД-регулятора для статического объекта рассчитываются по следующим формулам:



Для ПИД-регулятора передаточная функция устройства управления имеет следующий вид:
После преобразования:

2. Объект управления
2.1. Определение передаточной функции
Условием задано, что передаточная функция объекта управления есть последовательное соединение инерционного звена 1-го порядка и звена чистого запаздывания, т.е.
Разложим звено запаздывания в ряд Тейлора 3-й степени:

Таким образом, передаточная функция объекта управления примет вид:

2.2. Построение АЧХ и ФЧХ
В частотных характеристиках входной сигнал представляет собой последовательное колебание, описанное уравнением колебаний  . Для линейных характеристик выходная величина будет иметь схожую синусоидальную зависимость, однако будет наблюдаться сдвиг по времени, т.е.
. Для линейных характеристик выходная величина будет иметь схожую синусоидальную зависимость, однако будет наблюдаться сдвиг по времени, т.е.  , но другой размерности. Таким образом, амплитудно-частотная характеристика представляет собой отношение амплитуды выходного сигнала к амплитуде входного и показывает, как меняется амплитуда при изменении угловой частоты от нуля до бесконечности:
, но другой размерности. Таким образом, амплитудно-частотная характеристика представляет собой отношение амплитуды выходного сигнала к амплитуде входного и показывает, как меняется амплитуда при изменении угловой частоты от нуля до бесконечности:
Фазовая частотная характеристика характеризует отношение времени запаздывания к периоду колебаний и показывает, как изменяется сигнал в интервале угловой частоты от нуля до бесконечности:
Определим логарифмические амплитудные и фазовые частотные характеристики (рисунок 4):
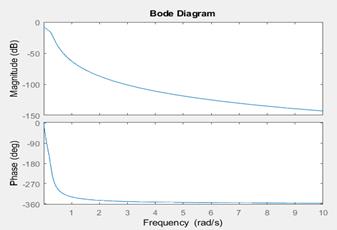
Рисунок 3 – Линейные АЧХ и ФЧХ
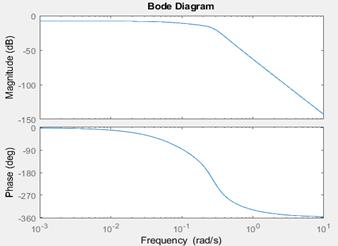
Рисунок 4 – Логарифмические АЧХ и ФЧХ
Анализируя полученные характеристики, видим, что амплитуда и сдвиг с ростом частоты, следовательно, с повышением периода колебаний, уменьшаются. Таким образом, сигнал принимает вид затухающих колебаний.
Критерий Найквиста характеризует амплитудно-фазовую характеристику, представляющую собой вектор амплитуды, описывающий с изменением частоты фигуру, в конечном итоге сходящуюся в нуле.
2.3. Устройство управления
Передаточная функция устройства управления имеет вид:
Определим логарифмические амплитудные и фазовые частотные характеристики (рисунок 5):
Рисунок 5 – Линейная АЧХ и ФЧХ
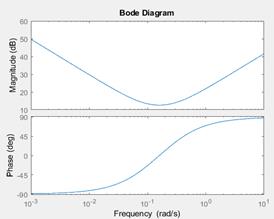
Рисунок 6 – Логарифмическая АЧХ и ФЧХ
2.4. Разомкнутая система.
Разомкнутая система – та система, при которой выходной сигнал не подается на элемент сравнения, следовательно, не создается сигнал рассогласования, при котором формируется управляющее воздействие на объект управления. Передаточная функция разомкнутой системы характеризует отношение выходного сигнала к величине ошибки в преобразовании по Лапласу и имеет следующий вид:


Определим линейные и логарифмические амплитудные и фазовые частотные характеристики (рис. 7 и рис. 8):

Рисунок 7 – Линейная АЧХ и ФЧХ
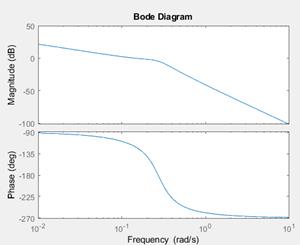
Рисунок 8 – Логарифмическая АЧХ и ФЧХ
2.5. Замкнутая система.
Замкнутая система – та система, при которой происходит передача значения входного сигнала на элемент сравнения с последующим формированием по полученному сигналу рассогласования управляющего воздействия на объект управления. Свойство замкнутых систем определяется по свойству разомкнутых. Передаточной функцией замкнутой системы в таком случае будет:
Функция замкнутой системы в MathLab:
3202 s^5 + 1692 s^4 + 529.2 s^3 + 95.2 s^2 + 5.6 s
------------------------------------------------------------------
4.576e06 s^9 + 4.837e06 s^8 + 2.791e06 s^7 + 1.11e06 s^6 + 3.189e05 s^5 + 6.803e04 s^4 +1.062e04 s^3 + 1113 s^2+ 67.14 s + 1.714
Определим линейные и логарифмические амплитудные и фазовые частотные характеристики (рис. 9 и рис. 10):
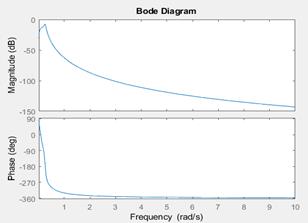
Рисунок 9 – Линейные АЧХ и ФЧХ
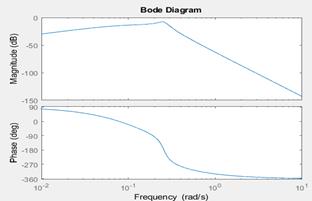
Рисунок 10 – Логарифмические АЧХ и ФЧХ
3. Определение устойчивости замкнутой системы
Аплитудно-фазовая характеристика – та характеристика, которая задается значением передаточной функции  и представляет собой гармонические колебания в виде вектора амплитуды, изменяющегося с угловой частотой, на плоскости комплексных переменных, т.е. АФХ является фигурой, которая описывается концом вектора амплитуды при изменении угловой частоты от нуля до бесконечности.
и представляет собой гармонические колебания в виде вектора амплитуды, изменяющегося с угловой частотой, на плоскости комплексных переменных, т.е. АФХ является фигурой, которая описывается концом вектора амплитуды при изменении угловой частоты от нуля до бесконечности.
Устойчивость характеризует свойство системы возвращаться в состояние установившегося равновесия после устранения возмущений, нарушивших это состояние. Система является устойчивой, когда АФХ разомкнутой системы не охватывает точку (−1; 0), при этом корни характеристического уравнения замкнутой системы имеют отрицательные вещественные части:
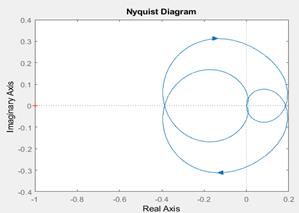
Рисунок 11 – Частотный годограф Найквиста (АФХ)
Полюсы замкнутой системы:
-0.1003 + 0.2582i
-0.1003 - 0.2582i
-0.0331 + 0.2538i
-0.0331 - 0.2538i
-0.2280 + 0.0000i
-0.1829 + 0.0204i
-0.1829 - 0.0204i
-0.1000 + 0.0000i
-0.0966 + 0.0000i
Т.к. вещественные части корней характеристического уравнения имеют отрицательный знак, можно утверждать, что система устойчива.
Нули:
0.0000 + 0.0000i
-0.1003 + 0.2582i
-0.1003 - 0.2582i
-0.2280 + 0.0000i
-0.1000 + 0.0000i
4. Определение переходного процесса замкнутой системы и показателей качества регулирования
Переходный процесс представляет собой графическую зависимость изменения выходной величины во времени при воздействии ступенчатого скачкообразного возмущения (рис.):
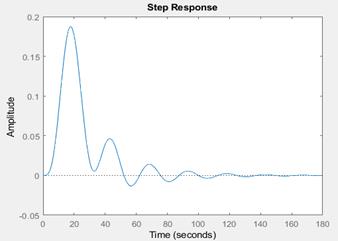
Рисунок 12 – Переходный процесс
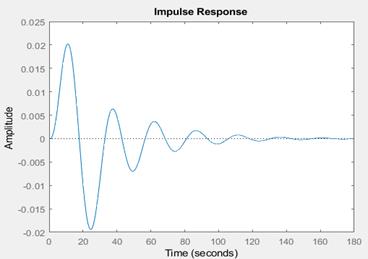
Рисунок 13 – Реакция выходного величины на импульсное воздействие
Определим максимальное фактическое динамическое отклонение:
 МПа
МПа
Определим фактическое время регулирования:
Согласно полученной переходной функции (рис. 12) видим, что фактическое время регулирования составило 160 секунд, что значительно больше заданного.
Вывод: в ходе расчетной работы ознакомились с принципом выбора и определения характеристик регулятора. Как видно, заданным требованиям соответствует только ПИД-регулятора. Полученная АФХ показывает, что замкнутая система устойчива. Анализ переходного процесса говорит о том, что фактическое время регулирования значительно превышает максимально допустимое. Статистическая ошибка у ПИД-регуляторов отсутствует.
Рекомендации: поменять требования, предъявляемые к выбору регулятора.