ПРИКЛАДНАЯ МЕХАНИКА
Методические указания
к выполнению расчетно-графических работ
и индивидуальных заданий
для студентов немеханических специальностей
дневной формы обучения
Краснодар 2005
Составители: д-р техн. наук, проф. С.Б. Бережной
канд. техн. наук, доц. В.Г. Сутокский
канд. техн. наук, доц. О.И. Остапенко
УДК 621.81
ПРИКЛАДНАЯ МЕХАНИКА. Методические указания к выполнению расчетно-графических работ и индивидуальных заданий для студентов немеханических специальностей дневной формы обучения. / Изд. 3-е, перераб. и дополн. / Сост.: С.Б.Бережной, В.Г. Сутокский, О.И. Остапенко; Кубан. гос. технол. ун-т. Каф. технической механики. - Краснодар: Изд. ГОУ ВПО «КубГТУ», 2005. - 63 с.
Даны основные положения курса «Прикладная механика», варианты заданий для расчетно-графических работ и индивидуальных заданий, примеры выполнения этих заданий. В конце каждого раздела приведен список контрольных вопросов и литература, необходимая для самостоятельной подготовки.
Ил. 26.Табл. 17. Библиогр.: 4 назв.
Печатается по решению Редакционно-издательского совета Кубанского государственного технологического университета
Рецензенты: д-р техн. наук, проф., В.Г. Солоненко
канд. техн. наук, доц., В.Н. Сухинин
СОДЕРЖАНИЕ
1 СТАТИКА…………………………………………………………………………………… 5
1.1 Основные определения и положения................................................................................. 5
1.2 Расчетно-графическая работа №1 «Определение реакций в опорах балки»………….. 7
1.3 Контрольные вопросы......................................................................................................... 11
2 СТРУКТУРНЫЕ ИССЛЕДОВАНИЯ МЕХАНИЗМОВ..................................................... 11
2.1 Основные определения и положения............................................................................... 11
2.2 Пример. Определение степени свободы плоского механизма........................................ 14
2.3 Контрольные вопросы......................................................................................................... 14
3 КИНЕМАТИКА. ПОСТУПАТЕЛЬНОЕ И ВРАЩАТЕЛЬНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА........................................................................................................................................... 15
3.1 Основные определения и положения................................................................................ 15
3.2 Расчетно-графическая работа №2 «Исследование кривошипно-ползунного механизма. Кинематический расчет».......................................................................................................... 17
3.3 Контрольные вопросы….................................................................................................... 25
4 ЗАДАЧИ ДИНАМИКИ. ПРИНЦИП ДАЛАМБЕРА. ОБЩИЕ ТЕОРЕМЫДИНАМИКИ. ОСНОВНОЕ УРАВНЕНИЕ ДИНАМИКИ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ ………… 26
4.1 Основные понятия, положения и определения............................................................... 26
4.2 Расчетно-графическая работа №2 «Исследование кривошипно-ползунного механизма. Силовой расчет шатуна».......................................................................................................... 28
4.3Контрольные вопросы......................................................................................................... 31
5 РАСЧЕТ НА ПРОЧНОСТЬ И ЖЕСТКОСТЬ ПРИ РАСТЯЖЕНИИ................................ 31
5.1 Основные определения и положения............................................................................... 31
5.2 Расчетно-графическая работа №3 «Расчет на прочность и жесткость при растяжении (сжатии)». …………………………………………………………………………………… 33
5.3 Контрольные вопросы...................................................................................................... 38
6 РАСЧЕТ НА ПРОЧНОСТЬ ПРИ СДВИГЕ........................................................................ 38
6.1 Основные определения и положения.............................................................................. 38
6.2 Контрольные вопросы...................................................................................................... 39
7 РАСЧЕТЫНА ПРОЧНОСТЬ И ЖЕСТКОСТЬ ПРИ КРУЧЕНИИ.................................. 40
7.1 Основные определения и положения............................................................................... 40
7.2 Расчетно-графическая работа №4 «Расчет на прочность и жесткость при кручении»……………………………………………………………………………………. 41
7.3 Контрольные вопросы................................................................................................. …. 45
8 РАСЧЕТЫНА ПРОЧНОСТЬ И ЖЕСТКОСТЬ ПРИ ИЗГИБЕ......................................... 46
8.1 Основные положения и определения......................................................................... 46
8.2 Расчетно-графическая работа №5 «Расчет балки на прочность при изгибе».............. 48
8.3 Контрольные вопросы................................................................................................ 51
9 СЛОЖНОЕ СОПРОТИВЛЕНИЕ. РАСЧЕТЫНА ПРОЧНОСТЬ………………………. 52
9.1 Основные определения и положения.............................................................................. 52
9.2 Расчетно-графическая работа № 6 «Расчет вала на прочность при совместном действии кручения и изгиба»................................................................................................................ 52
9.3 Контрольные вопросы.................................................................................................... 61
Список литературы............................................................................................................... 62
СТАТИКА
Основные определения и положения
Статика - раздел теоретической механики, в котором рассматривается условие равновесия тел с учетом действия на них внешних сил.
Абсолютно твердое тело - тело, расстояние между двумя любыми точками которого всегда остается неизменным.
Сила - мера взаимодействия тел. Вектор силы определяется точкой приложения, направлением и величиной.
Силы, действующие на систему тел, подразделяют на силы внутренние и внешние. Внешние силы действуют со стороны других тел, не входящих в данную систему. Внутренние силы - силы взаимодействия между телами данной системы.
В зависимости от характера приложения, нагрузки классифицируются следующим образом.
Таблица 1.1- Виды нагрузок
| Нагрузка | Единицы измерения | Условное обозначение нагрузки |
| Сосредоточенная сила | Н | 
|
| Равномерно распределенная нагрузка по длине | Н/м | 
|
| Неравномерно распределенная нагрузка по длине | Н/м | 
|
| Нагрузка, распределенная по площади | Н/м2 | 
|
| Изгибающий момент | Н-м | 
|
| Крутящий момент | Н-м | 
|
Момент силы, относительно точки - это произведение модуля силы на кратчайшее расстояние от рассматриваемой точки до линии действия силы.
Таблица 1.2 — Виды связей
| Тип связи | Реакции | Направление |
| Касание двух поверхностей | 
| По нормали к поверхностям в точке касания |
| Касание ребра и поверхности | 
| По нормали к поверхностям в точке касания |
| Шарнирно-подвижная опора | 
| Перпендикулярно оси балки (одна реакция) |
| Шарнирно-неподвижная опора | 
| Две взаимно перпендикулярные составляющие реакции |
| Жесткая заделка | 
| Две взаимно перпендикулярные составляющие реакции и момент |
| Нерастяжимая нить | 
| Вдоль нити |
| Жесткий невесомый стержень | 
| Вдоль оси стержня |
| Шарнирное соединение двух тел | 
| Две взаимно перпендикулярные составляющие реакции |
Твердое тело называется свободным, если оно не имеет ограничений для перемещения в пространстве.
Связи - ограничения, накладываемые на перемещения тела. Реакцией связи называется сила, с которой связь действует на рассматриваемое тело. В таблице 1.2 приведены различные типы связей и соответствующие им реакции для плоских систем.
Всякое несвободное тело можно рассматривать как свободное, если отбросить связи и заменить их реакциями связей.
Система сил - совокупность сил, действующих на тело. Если под действием системы сил тело находится в равновесии и не изменяет своего состояния, такая система сил называется уравновешенной.
Равновесие - такое состояние тела, при котором оно находится в покое или движется прямолинейно и равномерно.
Для равновесия тела в пространстве необходимо и достаточно, чтобы алгебраическая сумма проекций сил на оси координат равнялась нулю и алгебраическая сумма моментов этих сил относительно осей координат равнялась нулю.
 (1.1)
(1.1)
 (1.2)
(1.2)
Условие равновесия тела на плоскости определяют уравнения (1.1),
(1.2).
При составлении уравнения равновесия системы тел, реакции связей между телами, входящими в систему, не рассматриваются. При этом, в соответствии с принципом отвердевания, систему тел можно рассматривать как абсолютно твердое тело.
1.2 Расчетно-графическая работа №1 «Определение реакций в опорах балки»
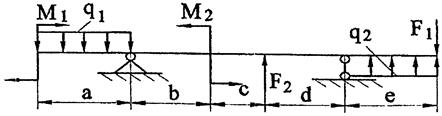
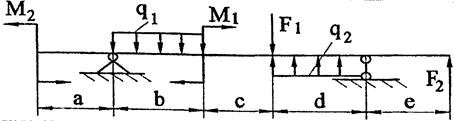
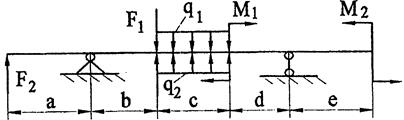
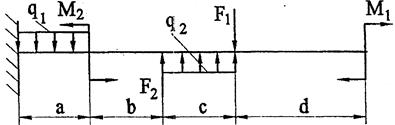
Определить реакции в опорах балки (табл. 1.3), нагруженной силами F1 и F2, изгибающими моментами M1 и М2 и равномерно распределенными нагрузками q1 и q2, (табл. 1.4). Найденные реакции проверить с помощью контрольного уравнения равновесия. Варианты заданий принять по номеру зачетной книжки, последняя цифра номера - вариант схемы балки из
таблицы 1.3; предпоследняя цифра номера - строка из таблицы 1.4, по которой принимаются значения нагрузок.
Пример решения РГР №1
Балка (рис. 1.1) закреплена на двух опорах: шарнирно-неподвижной А и шарнирно-подвижной В. На балку в точке Д действует сила F = 5 кН, направленная под углом а = 60° к оси балки. На участке ВС действует равномерно распределенная нагрузка интенсивностью q = 1 кН/м. В точке Е к балке приложен изгибающий момент М= 2 кН•м. Длины участков балки а = 2 м, b = 3 м, с = 2 м, d= 4 м.
Определить реакции в опорах балки, пренебрегая ее массой.
Решение
1. Распределенную нагрузку q заменяем сосредоточенной силой G = q • d =1•4 = 4 кН, приложенной посередине отрезка ВС.
2. Заменяем связи, опор А и В их реакциями. В плоской системе шарнирно подвижная опора В даст одну реакцию rb, направленную перпендикулярно оси балки, так как опора препятствует перемещению балки в этом направлении, а вдоль оси балки не препятствует. Реакция, в опоре А, может иметь любое направление, поэтому для удобства расчетов заменяем ее двумя составляющими RAX параллельной оси балки (ось ОХ) и RАу перпендикулярной оси балки (ось OY).
Таблица 1.3 - Схемы балок для индивидуального задания №1

| |
| |
|
| |

| |

| |
| |

| |
 
| |

|
Таблица 1.4 - Значения нагрузок для индивидуального задания № 1
| Номер варианта | F, кН | F2 кН | М, кН•м | М2 кН•м | q1 кН/м | q2 кН/м | a мм | b мм | с мм | d мм | е мм |

Рисунок 1.1 - Расчетная схема к примеру РГР №1
3. Определяем реакции в опорах. Для этого используем уравнения равновесия балки (1.1) и (1.2).
Следует стремиться составлять уравнения равновесия так, чтобы в каждое из них входила только одна неизвестная величина. В этом случае ее легко определить непосредственно из этого уравнения. Для определения реакций пользуются, как правило, уравнениями суммы моментов сил относительно точек опор, что позволяет исключить из уравнения реакции в этой опоре.
Сумма моментов, относительно точки А, определится по формуле


Сумма моментов, относительно точки В, определится по формуле


4. Выполняем проверку, для чего составляем уравнение суммы проекций всех сил на ось ОУ.


Равенство выполняется, реакции найдены верно.
5. Определяем реакцию RAx, Для этого используем уравнение (1.1) суммы проекций всех сил на ось ОХ

Если реакция получается со знаком «-», то на расчетной схеме меняем ее направление.
1.3 Контрольные вопросы
1. Какими параметрами определяется сила? В чем она измеряется?
2. Перечислите разновидности силовых факторов и их размерности.
3. Что такое реакция связи?
4. Перечислите разновидности связей и соответствующих им реакций.
5. В каком случае тело находится в равновесии?
6. Какие уравнения определяют условие равновесия тела в пространстве?
7. Какие уравнения определяют условие равновесия тела на плоскости?