Определим падение напряжения UT1 (действующее значение) с трансформатора напряжения T 1:
 (7)
(7)


Для выделения постоянной составляющей необходимы два функциональных элемента: нелинейный преобразователь и фильтр нижних частот (ФНЧ).
В качестве нелинейного преобразователя выбрана стандартная схема. При этом должно выполняться следующее условие:
 , (8)
, (8)
где rv1 – сопротивление открытого перехода диода VD1
Так как максимальное значение выходного напряжения с нелинейного преобразователя UНЛmax =10В, то коэффициент передачи по положительной огибающей:
 (9)
(9)
 =
= 
Возьмём R 8=314 кОм, R 5=6,36 кОм.
В качестве фильтра, выделяющего постоянную составляющую, выбираем стандартную схему ФНЧ первого порядка.
 (10)
(10)
Возьмём R 12 = 10 кОм; R 9 = 10 кОм.
Учитывая, что граничная частота fГР = 1,4 Гц << 50Гц, выбираем ее в качестве частоты среза ФНЧ, и определяем выражение для СФ1:
 (11)
(11)


На рисунке 3 схема включения датчика переменного напряжения.
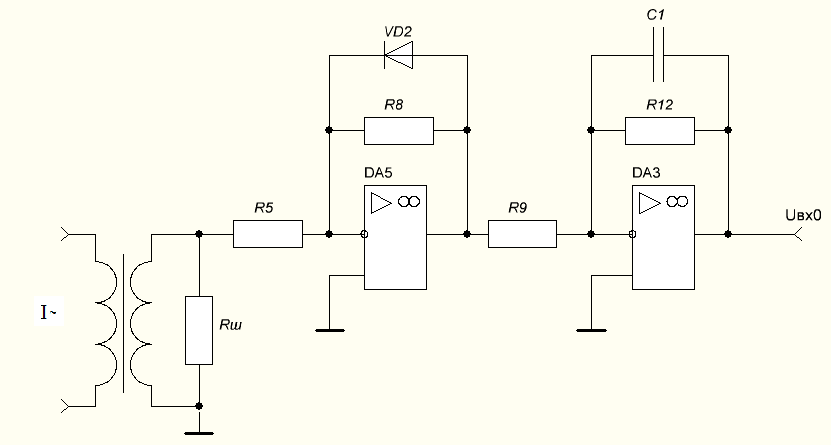
Рисунок 3 – Схема включения датчика переменного тока
Расчет датчика постоянного напряжения
Для контроля постоянного напряжения UП2 = 24 В, которое больше UАЦП = 10 В, необходим делитель напряжения R 1, R2. Определяем коэффициент передачи kд делителя:
 (12)
(12)
откуда следует: R 2 /R 1 =14/10 (например: R 1= 10 кОм; R 2=14 кОм).
На делителе реализуем ФНЧ с частотой среза, равной 1,4 Гц. Величину С 2 нужно рассчитывать по следующей формуле:
 (13)
(13)
Например, при R 1= 10 кОм; R 2=14 кОм:
 (14)
(14)
Для исключения влияния достаточно большого выходного сопротивления делителя на погрешность передачи канала включаем между делителем и мультиплексором повторитель напряжения на элементе А4. На рисунке 4 приведена схема включения датчика постоянного напряжения.
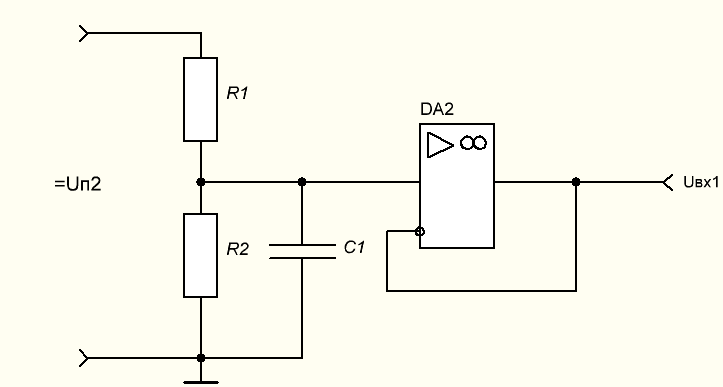
Рисунок 4 – Схема включения датчика переменного напряжения
Функциональная электрическая схема информационно-управляющей системы приведена в приложении А.
Расчет погрешностей каналов
Для оценки суммарной погрешности необходимо определить все погрешности передаточных коэффициентов структурных элементов.
1) Погрешность датчиков δД для всех трех датчиков одинакова и равна
δД0= δД1= δД2= 0,002. (15)
2) Определяем относительную погрешность коэффициента передачи δМУ, вызванную дрейфом «нуля» на входе МУ, приводящего к паразитному смещению входного сигнала, в заданном диапазоне Δt° температур эксплуатации:
δМУi= VМУi*Δt°/UДimax. (16)
δМУ1= 7∙10-6∙60/0,2= 210∙10-5.
δМУ2= 7∙10-6∙60/(0,45∙1,41)= 66,1∙10-5.
δМУ3= 7∙10-6∙60/24= 1,75∙10-5.
3) Определяем погрешность АЦП, которая заключается только в погрешности квантования δКВ:
δКВ= 1/(2n - 1)= 1/(28 - 1)= 3,9*10-3. (17)
4) Погрешность вносимая стабилитроном Д818Е:
dСТАБ= VСТ∙∆t°/Ест= 0,0001∙60/9= 0,00067. (18)
5)Определяем суммарную δΣ и общую δΣобщ погрешности для каждого канала модуля ИУС с учетом полученных выше погрешностей, а также заданной погрешности интерполяции δинтерп, обусловленной преобразованием в микроЭВМ выборок дискретизированных входных аналоговых сигналов в аналитические функции времени:
 (19)
(19)





Погрешность первого канала получилась самой большой, поэтому ее принимаем за погрешность всего устройства.