Массивный ротор представляется в виде вращающейся приведенной трехфазной обмотки. При частоте 50 Гц обмотки рассматриваются как электрические цепи с сосредоточенными параметрами, так как длина электромагнитной волны много больше линейных размеров обмоток. Принимается, что каждая фаза обмоток статора и ротора создает лишь основную пространственную гармоническую магнитного поля в зазоре. Моделью асинхронной машины (АМ) являются дифференциальные уравнения баланса напряжений фаз и уравнение движения ротора (рис. 3).
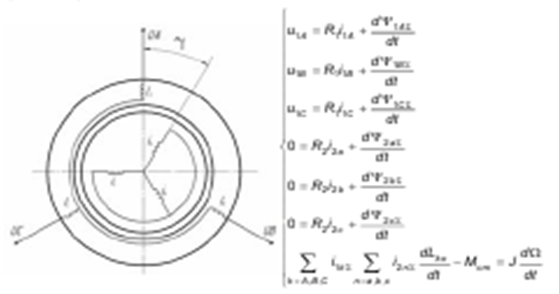
Рис. 3. Фазовая система координат и система дифференциальных уравнений переходного процесса АМ
Влияние насыщения и поверхностного эффекта на магнитное сопротивление массивного ротора и, соответственно, на параметры приведенной обмотки ротора учитывается с помощью универсальной зависимости, введенной Л.Р. Нейманом. Параметры приведенной обмотки ротора определяются по алгоритму, представленному в 3. Основные положения алгоритма представлены ниже на примере машины с одной парой полюсов. Массивный ротор разбивается на 2N элементарных участков (рис. 4) (ln - толщина участка; un - периметр поперечного сечения участка).
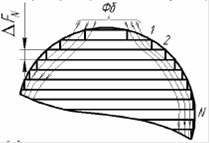
Рис. 4. Элементарные участки массивного ротора
Распределение намагничивающей силы вдоль окружности ротора принимается синусоидальным с амплитудой Fm2. Для N-го участка массивного ротора рассчитываются:
единичное комплексное магнитное сопротивление

 - действующее значение напряженности магнитного поля на поверхности участка; ∆F2N - падение магнитного напряжения в участке;
- действующее значение напряженности магнитного поля на поверхности участка; ∆F2N - падение магнитного напряжения в участке;
полно комплексное магнитное сопротивление участка при частоте перемагничивания f1

магнитный поток в участке
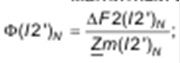
эквивалентное магнитное сопротивление массивного ротора

электрическое сопротивление приведенной обмотки ротора:
при частоте перемагничивания f1

при частоте перемагничивания f1*s
активная и реактивная составляющие эквивалентного электрического сопротивления массивного ротора (фазы)

В переходных режимах токи в фазах статора несимметричны. Изображающий вектор тока статора имеет вид

где m - число фаз; iA, iB, iC - мгновенные токи А, В, С фаз статора;  - оператор поворота. Полученный изображающий вектор тока эквивалентен по основной гармонической поля изображающему вектору тока при симметричном питании фаз статора. Характеристика намагничивания магнитной цепи ψm =f(I) рассчитывается при симметричном питании фаз статора. Амплитуда потокосцепления фазы статора рассчитывается как
- оператор поворота. Полученный изображающий вектор тока эквивалентен по основной гармонической поля изображающему вектору тока при симметричном питании фаз статора. Характеристика намагничивания магнитной цепи ψm =f(I) рассчитывается при симметричном питании фаз статора. Амплитуда потокосцепления фазы статора рассчитывается как

Действующее значение тока в фазе обмотки статора определяется по формуле

Суммарное падение магнитного напряжения вдоль замкнутой линии магнитного потока (на два полюса) составляет

При этом насыщение магнитной цепи статора учтено при расчете падений магнитного напряжения в зубцах и ярме статора; насыщение массивного ротора и действие поверхностного эффекта учтено при расчете падения магнитного напряжения в массивном роторе:

Главная индуктивность фазы в зависимости от тока и скольжения определяется по формуле

Влияние насыщения коронок зубцов статора на магнитные проводимости пазового и дифференциального рассеяния учитывается с помощью традиционной методики.
С помощью данной модели было произведено моделирование пуска асинхронного двигателя с массивным ротором, спроектированного на основе короткозамкнутого двигателя (мощность 3 кВт, синхронная частота вращения 3000 об/мин) при различных условиях работы, в том числе анормальных (питание несинусоидальным напряжением). Для проверки адекватности результатов, получаемых с помощью математической модели, она сопоставлена с математической моделью, основанной на расчетах мгновенных состояний электромагнитного поля.
Симметричный режим работы асинхронного двигателя с МФР. Рассмотрим пуск асинхронного двигателя (АД) с МФР на некоторую нагрузку. Произведем расчеты в параметрической и полевой моделях и сравним результаты по токам, скоростям и моментам. На рис. 5 показан ток одной из фаз статора АД с массивным ротором.
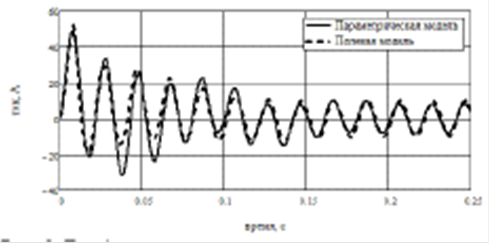
Рис. 5. Ток фазы при пуске
Кривые с определенной погрешностью сходятся. Расхождения объясняются принятыми допущениями. По полученным зависимостям также легко рассчитываются показатели работы машины в установившемся и переходном режимах. Ток фазы статора быстро затухает до установившегося режима. Исходя из этого можно сделать вывод, что двигателям данного типа присуще быстрое затухание апериодической составляющей тока при пуске из-за большого активного сопротивления ротора.

Рис. 6. Электромагнитный момент при пуске
На рис. 6 показано изменение электромагнитного момента АД с массивным ротором в переходном процессе пуска. Двигатель запускается, выходит на номинальную скорость при номинальной нагрузке. Максимальный бросок электромагнитного момента превышает номинальный момент почти в четыре раз. Такая высокая кратность обусловлена большой активной составляющей тока ротора. На графиках заметно отсутствие больших колебаний момента (знакопеременных), что также подтверждает быстрое затухание апериодической составляющей токов статора и ротора.

Рис. 7. Кривые разгона
Сравнение графиков показывает, что кривые, рассчитанные в разных моделях, практически сходятся, а значит, разработанная модель способна адекватно оценивать работу АД с МФР в симметричных режимах работы. Несинусоидальное питание АД с МФР. Анализируется процесс пуска АД с МФР при питании симметричным несинусоидальным напряжением. Форма питающего напряжения принята пилообразной с амплитудой, равной амплитуде при синусоидальном питании. Двигатель запустился и набрал номинальную скорость при номинальной нагрузке. Ток статора имеет в своем составе множество временных гармонических составляющих как при пуске, так и в последующем установившемся режиме, появление которых обусловлено несинусоидальностью поля в зазоре.

Рис. 8. Ток фазы при пуске
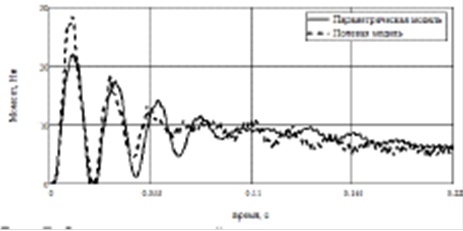
Рис. 9. Электромагнитный момент при пуске
Пульсации момента в установившемся режиме (рис. 9) обусловлены взаимодействиями прямых и обратных полей с токами, индуцированными этими полями, что свойственно для работы любого асинхронного двигателя при несинусоидальном питании.
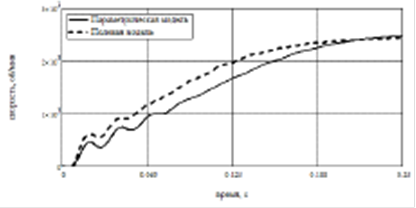
Рис. 10. Ток фазы при пуске
В кривой скорости (рис. 10) в установившемся режиме отсутствуют пульсации, что объясняется малой амплитудой колебаний электромагнитного момента в установившихся режимах. Расхождения в кривых объясняются принятыми допущениями. Таким образом, разработанная простая параметрическая модель позволяет быстро и качественно оценить переходные и установившиеся режимы электроприводов с асинхронными двигателями с массивным ротором при различных условиях работы, в том числе анормальных. Некоторые авторы заявляют, что с увеличением мощности машины с массивным ротором зависимость параметров ротора от насыщения становится слабовыраженной. Исходя из этого можно предположить, что точность данной модели для более мощных машин становится большей.