ТЕМА 2. Характеристики передаточных механизмов (ПМ). Точность ПМ.
Основные Характеристики ПМ
1. Диапазон преобразования ПМ - ДИАПАЗОНЫДВИЖЕНИЯ ВХОДНОГО (Дх) И ВЫХОДНОГО (Дy) ЗВЕНЬЕВ (разность между наибольшим и наименьшим значениями координат линейного (ХY) или углового (Фх) положения звеньев).
2. Функция преобразования (ФП) – устанавливает связь между перемещениями входного и выходного звеньев передаточного механизма. (в ТММ - функция положения)
y= f(x)
3. Статическая чувствительность, передаточное отношение
k = dy/dx = Dy/Dx = f I(x)
4. Погрешность преобразования ПМ – отличие действительного закона движения выходного звена от требуемого.
При этом ведущее, входное звено движется по идеальному закону!! – чаще всего равномерно!!!
5. Режим работы ПМ – статический и динамический. Для простоты будем РАССМАТРИВАТЬ СТАТИЧЕСКИЙ РЕЖИМ РАБОТЫмеханизма: (скорости движения малы, переходные процессы завершены, ускорения отсутствуют…)
6. Можно рассматривать и другие характеристики и свойства ПМ, например: Макс. Скорости движения Vx, Vy, макс. Момент на выходном валу My, мощность преобразуемая W, температура механизма { T пм } и т.д. и т.п.
Будем рассматривать при анализе и проектировании (синтезе) точные механизмы приборов,которые предназначены для преобразования движений с минимальными ошибками.
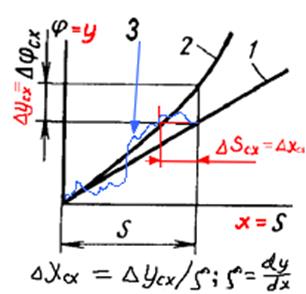
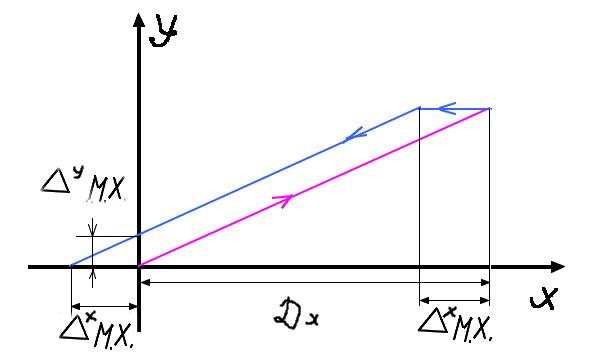
График Функции преобразования (ФП) на рисунке.
 На одном координатной поле указаны следующие представления ФП ПМ:
На одном координатной поле указаны следующие представления ФП ПМ:
1- номинальная f ном(x)
2- теоретическая fтеор.(x)
3 - действительная fдейст.(x)
Dy, Dx- Диапазоны движения
dx,dy- Нелинейность - отклонение ФП от линейного вида.
1 Номинальная ФП f ном (x)
– с точки зрения проектировщика, почти всегда желательно, чтобы f ном (x) была линейной функцией вида
у=аx или у=kx +b.
• Линейные преобразования всегда более простые и удобные при анализе и синтезе ПМ, чем нелинейные;
• В измерительных системах линейные законы преобразования ПМ позволяют применять линейные шкалы - это приводит к меньшим погрешностям.

• В сложных системах, содержащих несколько ПМ, суммарные ФП уS =f(x) могут быть линейными, (если все ФП ПМ линейные) или нелинейными, (если хотя бы один ПМ имеет нелинейную ФП);
2 Теоретическая ФП f теор.(x) - ФП, которую воспроизводит теоретический механизм.
Теоретический (идеальный) механизм – это ПМ, который:
· не содержит погрешностей в размерах и конфигурации звеньев,
· не имеет ошибок и трения в кинематических парах;
· точно воспроизводит заданный закон движения.
Теоретическая ФП f теор.(x)- может быть линейной или нелинейной - это определяется устройством и кинематикой ПМ(структурой ПМ)
3 Действительная ФП f дейст.(x) - ФП реального изготовленного механизма, определяемая комплексом структурных (теоретических, схемных), технологических и эксплуатационных факторов.
Нелинейность ФП f дейст.(x) (независимо от причин возникновения) – это всегда источник погрешностей.
Нелинейность может быть выражена в перемещениях Х и У входных и выходных звеньев. На графиках d х и d у – соответственно, нелинейность теоретической ФП, выраженная в перемещениях входного и выходного звеньев. 
dх – будем называть нелинейностью в точке Х i, приведенной ко входу ПМ. (Часто эту нелинейность обозначают d1 – индекс 1 показывает, что погрешность приведена ко входу 1-го звена.)
Причины различий fтеор.(x), fд.(x) и f ном(x) т.е. нелинейности ФП:
· схемные причины (структурные, теоретические),
· технологические причины (возникающие при изготовлении звеньев, кинематических пар и сборке ПМ)
· эксплуатационные причины.
Теоретическая погрешность - - погрешность схемы
Линейность теоретической ФП идеального ПМ, подобранного конструктором при проектировании не означает, что действительная ФП такого реально изготовленного ПМ будет такой же линейной.
Поэтому при конструировании механизма часто применяют более простые и технологичные ПМ с нелинейной теоретической ФП, которые приближенно, но свысокой определенностью, стабильностью воспроизводят закон движения близкий к требуемому.
При этом:
· Технологические погрешности изготовления таких простых ПМ оказываются существенно меньшими – т.к. изготавливаются очень простые и технологичные элементы кинематических пар и звеньев;
· Погрешности, вызываемыми схемными причинами (от нелинейности теор. ФП), могут быть оценены и учтены в общем балансе погрешности при синтезе механизма.
· Значения этих погрешностей на небольших диапазонах Дх часто оказываются меньше, чем технологические погрешности ПМ с теоретической линейной ФП.
Ошибка схемы механизма DCX как источник погрешности может быть определена в виде разности перемещений ведомых звеньев механизмов, изготовленных по упрощенной схеме YД (имеющей схемную нелинейность) и по точной (линейной) схеме YT:
DCX = jД — jT.
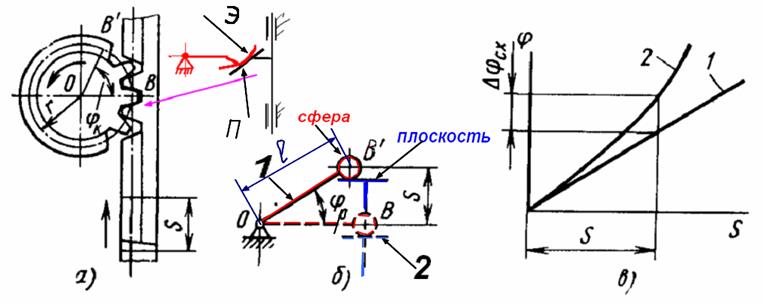
Например, для преобразования поступательного движения ведущего звена во вращательное движение ведомого могут быть использованы зубчато-реечная передача (рис. а) или рычажный механизм синусного типа (рис. б).
Теоретическая ФП зубчато-реечной передачи - зависимость между углом поворота колеса jк и перемещениями рейки S— линейная (прямая 1 ):
ФП имеет вид: jк = S/r.
Для синусного механизма ФП поворот рычага (1) при перемещении толкателя (2) имеет вид (кривая 2).
ФП имеет вид: j p = arcsin (S/l),
где l-длина рычага
Погрешность схемы, вносимая такой заменой, при одинаковом перемещении ведущего звена S и r = l
Dj cx = jk — jр = (S/l) — arcsin (S/l).
При малых значениях перемещений S ошибка схемы Djcx может оказаться несущественной, а с точки зрения технологичности рычажный механизм проще и может быть изготовлен с более высокой точностью.
Кривая 3 на графике –действительная ФП реечно-зубчатого ПМ!!!
Такая нелинейность имеет часто случайный характер и нелинейность такой ФП много больше теоретической и действительной ФП рычажного ПМ.

Технологические погрешности.
Источниками этих ошибок являются погрешности изготовления звеньев ПМ и элементов КП, неоднородность материала деталей, погрешности сборки.
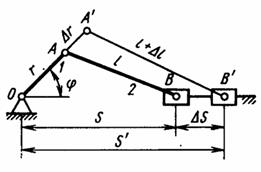 |
Например, ошибкой начального положения D S называется разность в положениях ведомых звеньев при одинаковых положениях ведущих звеньев действительного и теоретического механизмов:
DS = S' — S.
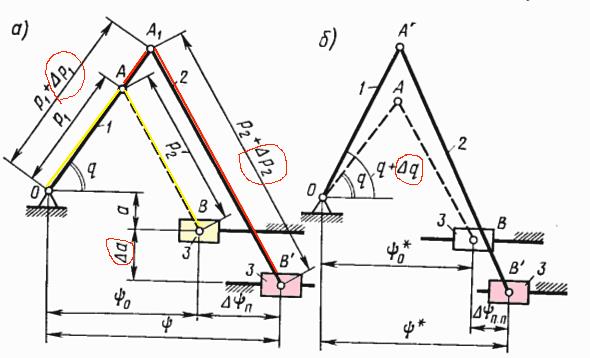
Источники погрешности технологические погрешности Dr, Dq, Da
Эксплуатационные Погрешности. При работе ПМ основными причинами погрешностей являются:
· влияние сил и деформации звеньев;
· изменение размеров и формы звеньев придлительной эксплуатации (старение материалов и релаксация).
· износ взаимодействующих поверхностей Кинем. Пар (КП) - в результате чего появляются перекосы, увеличиваются зазоры и мертвый ход.
· Загрязнение поверхностей КП
· Температурные воздействия. Изменение температуры вызывает изменения линейных размеров, характера сопряжения деталей, свойств материала, вязкости смазки и т. д.
Мертвый ход вызывается совместным действием эксплуатационных и технологических причин.
Мертвый ход ( М.Х ) – 1) можно определить как отставание ведомого звена, возникающее при реверсировании движения ведущего..
2) М.Х - это перемещение, вызываемое изменением направления сил, приложенных к ведомому звену, при неподвижном ведущем звене механизма
ФП ПМ при наличии М.Х. имеет две ветви (прямой и обратный ход), образующие «петлю гистерезиса».
Иногда, чтобы вернуть ведомое звено в исходное положение приходится перемещать входное звено в область за пределами диапазона Дх.
Причины возникновения М.Х. - наличие зазоров в кинематических парах и соединениях, трение в КП, а также упругие деформации звеньев.
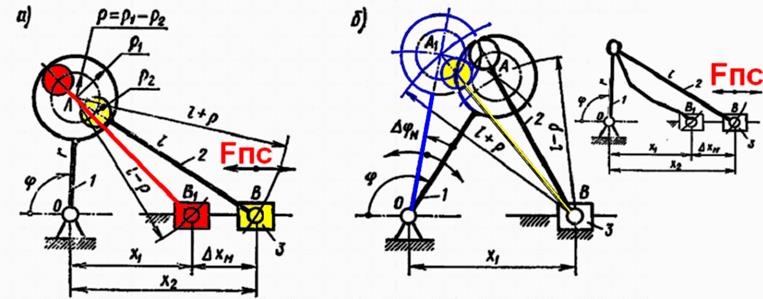
на схемах обозначены: r - зазор в КП, Fпс - сила полезного сопротивления (полезная нагрузка), l и r – размеры звеньев.