В камерной шине находится резиновая камера, которая заполняется воздухом. Шина без камеры раньше называлась покрышкой.
Шина состоит из каркаса (корда) и протектора, а также боковин и бортов (рис. 8).

1 - диск колеса; 2 - обод; 3 - борт; 4 - камера; 5 - боковина; 6 - корд; 7 - протектор
Рисунок 8 - Колесо легкового автомобиля
Каркас шины является главной несущей частью, ее силовой основой. Он выполняется из нескольких слоев специальной ткани - корда.
Корд воспринимает давление сжатого воздуха изнутри и нагрузки от дороги снаружи. Материалом нитей корда могут служить: хлопок, вискоза, капрон, нейлон, металлическая проволока, стекловолокно и другие материалы.
Протектор - это толстый слой резины с определенным рисунком, который расположен на наружной поверхности покрышки и непосредственно соприкасается с поверхностью дороги.
Рисунок протектора может быть дорожным, универсальным и специальным. Выбор покрышки с тем или иным рисунком протектора зависит от предполагаемых условий эксплуатации автомобиля.
Каждый человек меняет обувь в зависимости от сезона. Если туфли на высоком каблуке идеальны для сухого асфальта или паркета, то в них абсолютно невозможно передвигаться по грязи, мокрому снегу или льду. А шины, это обувь вашего автомобиля, и если вы подбираете рисунок протектора в зависимости от условий эксплуатации, то поступаете очень мудро. Это повышает безопасность движения вашего автомобиля, а также обеспечивает безопасность других участников дорожного движения.
Разглядывая "зимнюю" покрышку, обратите внимание на рисунок протектора - он может быть "направленным". Это означает, что такая покрышка должна вращаться по направлению стрелки, нанесенной на ее боковине. При этом покрышка устанавливается только на правую сторону автомобиля или только на левую. Перестановка колес с направленным рисунком протектора шин с одной стороны машины на другую не допускается.
В бескамерной шине отсутствует, и не предусмотрена, резиновая камера для воздуха. Полость, заключенная между покрышкой и ободом, должна быть герметичной, так как непосредственно она и заполняется воздухом. Поэтому диск для бескамерной шины отличается от обычного диска наличием уплотняющих буртиков на ободе. При покупке дисков на это следует обращать внимание. Если вы используете шины с камерой, то подойдут любые диски, буртики вам не помешают.
Шины бывают с диагональным и радиальным расположением нитей корда, в зависимости от конструкции каркаса.
В диагональных шинах нити корда располагаются перекрестно под углом 35-38° и соединяют боковины покрышки по диагонали. На легковых автомобилях такие шины уже не применяются.
В радиальных шинах нити корда расположены по отношению к бортам почти под прямым углом.
Основными достоинствами радиальных шин являются: хорошее сцепление с дорогой, малое сопротивление качению и большой срок службы. Они более эластичны, чем диагональные, поэтому поездка на автомобиле становится более комфортной и безопасной. В тоже время, при небрежном отношении к радиальным шинам срок их службы может снизиться до первого наезда на бордюрный камень (ввиду слабых по прочности боковин таких шин).

Рисунок 9 - Шины
Маркировка шин.
При покупке шин внимательно изучайте их маркировку. Например, на боковине шины можно увидеть надпись 175/70 R13. Это означает следующее:
175 - ширина профиля шины в миллиметрах,
70 - соотношение высоты профиля шины к ее ширине в процентах,
R - радиальная шина (с радиальным расположением нитей корда),
13 - посадочный диаметр шины в дюймах (1 дюйм равен 2,54 см).
Параметры шин и дисков для конкретной модели вашего автомобиля вы можете найти в заводской инструкции по его эксплуатации.
Передний мост является, пожалуй, самым сложным элементом ходовой, это связано с тем, что схема трансмиссии автомобиля переднеприводная, но количество основных узлов в его устройстве не так уж и велико. Это:
1. Стойка с амортизаторами;
2. Поворотный кулак;
3. Поперечный рычаг;
4. Растяжки;
5. Узлы крепления ходовой части к кузову и трансмиссии;
Из-за более мягкого режима работы (по сравнению с задним приводом предыдущих моделей), у конструкторов появилась возможность упростить схему и устройство этого узла. Так в задней подвеске ходовой части отсутствуют растяжки и детали для передачи вращающего усилия колесам, стабилизаторы (так как их роль выполняет балка), это незначительно ухудшило динамические параметры автомобиля, зато значительно повысило безотказность. В схему этого узла ходовой входят:
- Продольные рычаги;
- Центральная балка;
- Кронштейны крепления моста автомобиля к лонжерону;
- Гидравлические амортизаторы;
- Пружины (пара);
- Фланцы для крепления колес.
1.2 Внешние возмущения, влияющие на «Автоматизацию ходовой части автомобиля»
Амортизаторы предназначены для быстрого уменьшения энергии колебаний кузова и колес.
Регулировка демпфирования.
Рабочий цикл амортизатора делится на фазу давления (сжатия пружины) и фазу растяжения (отбоя пружены). Демпфирующее усилие в фазе давления обычно меньше, чем в фазе растяжения.
Амортизаторы предотвращают колебания кузова о неконтролируемый отскок колес, называемые неровностями дорожного покрытия. Кроме того, за счет усилия демпфирования обеспечивается дополнительная реабилитация кузова при динамическом маневрировании.
Дальнейшее увеличение эффективности демпфирование достигается благодаря регулируемым амортизатором, позволяющим лучше учитывать актуальную ситуацию на дороге. Блок управления системы электронного регулирования демпфирования за несколько минут определяет и обеспечивает необходимую степень демпфирования для каждого колеса.
Постоянная затухания показывает, насколько быстро уменьшаются колебания. Она зависит от усилия демпфирования амортизатора и стороны подрессоренных шасси.
Увеличение подрессоренных масс уменьшает постоянную затухания, а это значит, что колебания затухают медленнее.
Уменьшение подрессоренных масс увеличивает коэффициент затухания.
Благодаря обратным клапана м н а по ршн е и клапану сжатия поток масла перемещается при растяжении и сжатии в показанном на рисунке направлении.
Через кольцевой канал масло подается на ре гули- руемы1й клапан и проходила через него при растяжении и сжатии в одном и том же направлении (прямоток). От регулируемого клапана масло поступает обратно г рабочую камеру 2.
Регулируемый клапан определяет давление в рабочей камере 2,а следовательно, и степень демпфирования.
Раб чая камера 2 выполнена в виде резервуара. Она только частично заполнена маслом. Над слоем массива расположена газовая подушка со спиралью непогашения. Рабочая камера 2 предназначена для компенсации изменений объема масла.
Уменьшеиае пото ка мисли осуще ствляется с п омощью блокон демпфирующих клапанов на поршне, освовании ркбочей камеры, а также в регулируемом клапане. Они состоят из системы пружинных шайб, винтовых пружин и корпусов клапанов с дросселирующими отверстиями.
Фазе растяжения уменьшение потока масла обеспечивают следующие элементы:
- регулируемый клапан,
- клапан сжатия,
- в некоторой степени поршневой клапан,
- регулируемый клапан,
- поршневой клапан, в некоторой степени клапан сжатия.
По сравнению с жестко заданной параметрической характеристикой стандартного амортизатора, параметрическую характеристику регулируемого амортизатора можно изменять в пределах заданного диапазона.
Стандартные амортизаторы имеют только одну параметрическую характеристику, определяющую наряду с другими факторами динамические характеристики автомобиля.


Рисунок 10 - Фазы растяжения
Определение данной параметрической характеристики происходит в результате регулирочки ходовой части, которая выполняется для каждого автомобиля. Это зависит, кроме всего прочего, от распределения нагрузки на автомобиль, агрегатирования, характеристики автомобиля и кинематики подвески.
Параметрические характеристики регулируемых амортизаторов можно изменить путем подачи низкого управляющего напряжения на регулируемый кла пан. Таким образом задается параметрическое поле.
Данная адаптация доступна при любом режиме движения („Normal" Sport" и „Comfort").
В зависимости от текущей ситуации на дороге степень демпфирования адаптируется в рамках заданного параметрического поля даже при выбранном режиме движения.
В режиме (Программа аварийного движения) напряжение на регулируемые клапаны не подается, поэтому амортизаторы работают в соответствии с конструктивно предусмотренной параметрической характеристикой.
2 Проектирование структурной схемы автоматизированного управления по ходовой части автомобиля
2.1 Выбор системы управления процессом
В вопросах ходовой части все еще сохраняется закономерность: заметное увеличение; спортивности происходит за счет уменьшения комфорта.
С новой системой - системой адаптивного управления ходовой! части DCC - ходовая часть непрерывно адаптируется к параметрам дороги, ситуации и намерениям водителя.
Для выполнения такой адаптации необходимы регулируемые амортизаторы.
Наряду с демпфированием адаптируется и усилитель рулевого управления.
Система (адаптивного управления ходовой части DCC впервые была установлена на Volkswagen Passat CC.
В этой программе самообучения представлена подробная информация о принципе работе системы адаптивного управления ходовой части DCC.
Регулируемые амортизаторы получают сигналы управления от блока управления, регулирующего демпфирование в соответствии с разработанным фирмой Volkswаgen алгоритмом регулировки. П|еи этом в зависимости от входящих еигналов используется все параметрическое поле регулируемых амортизаторов. Переключиться с текащего алгоритма регулировки можно путем выбора режима с помощью клаваши, адапеировав,таквм образом, демпфировение к запросам клиента. Регулировка системы доступна как при стоящем автомобиле,так и в режиме движения.
Сестема адаптивиого упкавевеия ходовой части [ЭСеС всегда акеи вна. Ота евляется иттеллектуальной,саморегулирующейся системой,управляющей амортизаторами автомобиля в зависимости от следующих факторов:
- количество дорожного покрытия,
- текущая ситуация на дороге (например, торможение, ускорение или движение в повороте)
- запросы водителя
Указания:
- Последний включенный режим движения сохраняется даже после ВКЛ./ВЫКЛ. зажигания.
- Выбрать режим движения можно как при стоящем автомобиле, так и в режиме движения.
- При стоящем автомобиле напряжение на регулируемые клапаны не подается.
Таким образом, обеспечивается оптимальная регулировка ходовой части.
Доступные режимы работы системы DCC
Водитель может выбрать режим работы системы DCC в зависимости от личных запросов с помощью клавиши сп резва рядом с рычагом переключения пе редач. Клавишу необходими нажимать,пока не будет выбра н веобходимый режим. Переключать режимы можно люебое количество раз. Переключение будет всегда происходить Ei последовательности „Normal", „Sport", „Comfort".

Рисунок 21 - Система управления
Режим „Normal"
Если на клавише не горит желтыми светом надпись „Comfort" значит, включен режим „Normal". Даннря регулировка обеспечивает в целом сбалансированное, но динамичиое движелие. Данныый режим подходит для повседневного использования. Режим „Sport". Режим включен,если на клавише горит желтым светом надпись „Sport". Благодаря этой регулировее автомобиль приобретает спортивные характеристики с более жесткой еазовой регул ировкой. еулевое управле ние адаптируется соответствующим образом, становится епортивнее, а демпфирование ходовой части жестче. Данный режим в первую очередь обеспечивает более спортивный стиль движения. Режим „Comfort". Режим вкпючен, если на клавише горит желтым светом надпись „Com fort". Результатом данной регулировки является более мягкое базовое регулирование демпфирования ходовой части,обеспечивающее комфорт при движении. Этот режим подходит, например, для движения по сорогам с плохим покрытием или на большие расстояния. Разница с режимах высажается в различной жесткости базовой регулировки демпфирования. При этом в зависимости от ситуации на дороге при возникновении особых требований к усилию демпфирования выполняется корректировка этой жесткости.
2.2 Схема получения и передачи информационного сигнала, обратная связь
На обзорной схеме показаны компоненты системы адаптивного управления ходовой части DCC и их взаимосвязь в доступной форме (Датчики оснащены отдельными подключениями к блоку управления системы электронного регулирования демпфирования J250 - на рисунке они объединены для простоты осями).

E387 Клавиша настройки демпфирования, G76 Задний левый датчик дорожного просвета, G78 Передний левый датчик дорожного просвета, G289 Передний правый датчик дорожного просвета, G341 Передний левый датчик ускорения кузова, G342 Передний правый датчик ускорения кузова, G343 Задний датчик ускорения кузова, J104 Блок управления ABS, J250 Блок управления системы электронного регулирования демпфирования, J285 Блок управления комбинации приборов, J500 Блок управления усилителя рулевого управления, J533 Диагностический интерфейс шин данных, N336 Клапан регулировки демпфирования переднего левого колеса, N337 Клапан регулировки демпфирования переднего правого колеса, N338 Клапан регулировки демпфирования заднего левого колеса, N339 Клапан регулировки демпфирования заднего правого колеса
Рисунок 22 – Система
управления
При активной системе адаптивного управления ходовой части DCC осуществляется обмен данными между блоком управления системы электронного регулирования демпфирования и соответствующими, подключенными к шине CAN, блоками управления.
Обзорная схема системы наглядно представляет данные, передаваемые через шину данных CAN или получаемые и используемые подключенными к шине блоками управления.
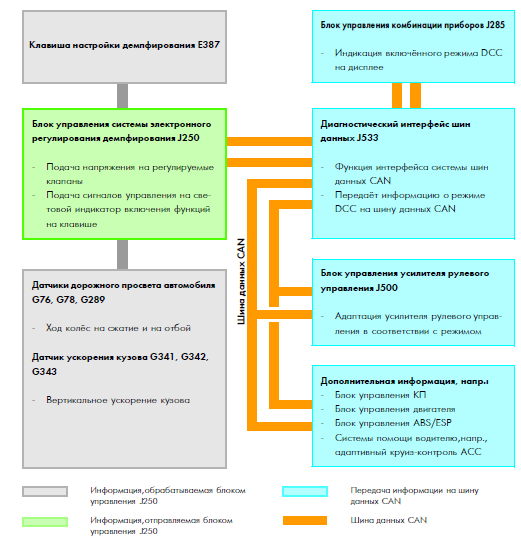
Рисунок 23 - Обзорная схема системы управления ходовой части
2.3 Разработка основных элементов структурной схемы автоматизации процесса – датчики, промежуточные устройства, устройства управления, исполнительные устройства
Дополнительная информация, кроме всего прочего: положение педали акселератора (усилие, прилагаемое водителем) сигнал датчика угла поворота рулевого колеса давление в тормозной системе

Рисунок 24 - Датчики системы
2.4 Преобразование сигнала по динамическим звеньям, переходные процессы
Функциональная схема:
E387 Клавиша настройки демпфирования
G76 Задний левый датчик дорожного просвета
G78 Передний левый датчик дорожного просвета
G289 Передний правый датчик дорожного просвета
G341 Передний левый датчик ускорения кузова
G342 Передний правый датчик ускорения кузова
G343 Задний датчик ускорения кузова
J104 Блок управления ABS
J250 Блок управления системы электронного регулирования демпфирования
J285 Блок управления комбинации приборов
J500 Блок управления усилителя рулевого управления
J519 Блок управления бортовой сети
J533 Диагностический интерфейс шин данных
K189 Контрольная лампа системы регулирования демпфирования
L76 Лампа подсветки клавиши
N336 Клапан регулировки демпфирования переднего левого колеса
N337 Клапан регулировки демпфирования переднего правого колеса
N338 Клапан регулировки демпфирования заднего левого колеса
N339 Клапан регулировки демпфирования заднего правого колеса


Рисунок 25 - Функциональная схема управления
2.5 Устойчивость разрабатываемой автоматизированной системы
Демпфирование в крайних положениях препятствует возникновению усилия и шумов упора в фазе растяжения или нажатия.
Определение загрузки предназначено для определения массы кузова автомобиля как входящей величины. Эта величина рассчитывается путем обработки показаний датчика дорожного просвета автомобиля и передается другим системам автомобиля через шину CAN.
Определение загрузки:
Особенности:
Демпфирование в крайних положениях:
Стенд проверки демпфирования:
Стенд для проверки тормозов:
На стенде для проверки тормозов система получает данные о частоте пращения колес. Теме не менее, ускорение кузова определить невозможно.
Поэтому система переключается в р ежим Comfort - мягкой подвеске и исходкт из корошего качеетва деорожного покрытия.
На стенде для проверки демпфирования система получает информацию ор датчиков дорожного просвета автомобиля, датчиков ускорения кузова и реформаеию о частоте вращения колес.
При этом система адаптивного управления ходовой пасти считает, что автомобнль стоит. На амортизаторы не подается напряжение, поэтому их можно легко проверить.
3 Устройство и работа предлагаемых типовых элементов проектируемой системы
3.1 Устройство и работа предлагаемых датчиков
Выбраны датчики:
Клавиша настройки демпфирования E387
Датчик ускорения кузова, передний левый G341
Передний правый датчик ускорения кузова G342
Датчик ускорения кузова, задний G343
Передний левый датчик дорожного просвета G78
Передний правый датчик дорожного просвета автомобиля G289
Задний левый датчик дорожного просвета автомобиля G76
Датчики дорожного просвета автомобиля G76, G78, G289
Датчики дорожного просвета автомобиля представляют собой так называемые датчики угла поворота.
Они установлены рядом с соответствующими амортизаторами и подвижно соединены с помощью соединительных тяг с поперечными рычагами подвески.
Ход пружины колес передается через перемещение поперечных рычагов передней и задней подвески и соединительные тяги на датчики и пересчитывается в угол поворота.
Принцип работы устанавливаемого датчика угла поворота основан на использовании статических электромагнитных полей и эффекта Холла.
На выходе обеспечивается пропорциональный углу поворота сигнал ШИМ (широтно-импульсной модуляции) для регулировки демпфирования.

Рисунок 26 - Датчик дорожного
просвета автомобиля

Рисунок 27 - Датчик дорожного
просвета автомобиля
Датчик выполнен в корпусе, состоящем из двух камер. С одной стороны (в 1 камере) находится ротор, а на противоположной стороне (во 2 камере) - плата со статором. И ротор,и статор оснащены уплотнениями.
Ротор состоит из немагнитного вала из высококачественной стали, в который вклеены редкоземельные магниты. Редкоземельные магниты используются там, где необходимо обеспечение сильного магнитного поля минимального размера.
Приводной рычаг соединяет ротор с сосдиоательный тягой и привнднт ротор в движение.
Ротор крепится к приводному рычагу с помощью радиального уплотнения. Оно защищает всю конструкцию от влияния окружающей среды.
Статор состоит из датчика Холла, установленного ра плату.
Плата покрыта слоем Ри (Ри = полиуретан) и ращищена,таким образом,от внешних воздействий.
Датчики ускорения кузова Э341, Э342, Э343
Датчики ускорения кузова измеряют вертикальное ускорение кузова.
Датчики ускорения кузова измеряют вертикальное ускорение кузова.
Передний левый датчик ускорения кузов а С5341 и передний правый датчик ускорения кузова ОЭ42 установлены на кузов сверху рядом с соответствующим амортизатором.

Рисунок 28 - Датчики ускорения кузова
Задний датчик ускорения кузове 0343 установлен на кузов наверху рядом с левыам задним амортизатором.

Рисунок 29 - Датчик ускорения кузова –
задняя подвеска
Датчик ускорения кузова работает по принципу емкостного измерения.
Между пластинами конденсатора находится вакрепленная с помощью эпастичньых элементов масса гтнвьыполняющая функцию пентрпльного электрода,и изменяющая емковть конденсаторов С1 и С2 в ритме собствевныв колебаний в обрат- рвм ваправлении. Васстоявпе между пластинами Н1 одвого конденсатора увелич ивается настолько, сасколько уменьшается насстояние с12 другого конленснтора. Это приводит к изменению емкости отдельных конденсаторов.
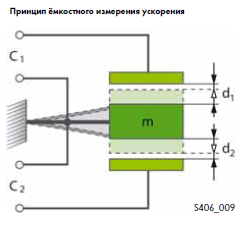
Рисунок 30 - Принцип емкостного измерения ускорения
Электронная система оценки передает аналоговый сигнал напряжения на блок управления системы электронного регулирования демпфирования J250.
Датчик - диапазон измерения
Диапазон измерения датчика составляет ± 1,6 д.
д = единица измерения ускорения 1 д = 981 м/в2.
3.2 Устройство и работа предлагаемых промежуточных устройств
Для системы адаптивного управления ходовой части С>С1СЬ используется регулируемые амортизаторы телескопического исполнения.

Рисунок 31 - Устройство для контроля усилий и люфта
рулевого управления автомобиля
Большой интерес представляет электронное устройство для контроля усилий и люфта рулевого управления автомобиля.

Рисунок 32 - Блок-схема электронного устройства для контроля
усилий и люфта рулевого управления
Выход датчика 2 микроперемещений подключен к входу порогового усилителя 6, выход которого соединен с входом управляющего ключа 10. Один из выходов ключа 10 подключен к индикатору "Измерение" 16, другой - к входу сброса счетчика импульсов 12, третий - к одному из входов цифрового индикатора 15, четвертый - к управляющему входу логического элемента И 8, информационный вход которого через нормирующий усилитель 4 подключен к датчику 1 угловых перемещений.
Пятый выход управляющего ключа 10 подключен к управляющему входу логического элемента И 9, информационный вход которого соединен с выходом преобразователя "аналог - частота" 7. Вход преобразователя "аналог - частота" подключен к выходу нормирующего усилителя 5, вход которого соединен с датчиком 3 усилий.
Выходы логических элементов И 8 и 9 соединены с входами логического элемента ИЛИ 11, выход которого подключен к счетному входу счетчика импульсов 12. К выходу счетчика импульсов подключены информационный вход цифрового индикатора 15 и один из входов компаратора 13. С другим входом компаратора соединен датчик 14 эталонных сигналов, а к выходу компаратора подключен индикатор "Превышение" 17.
В качестве датчика 3 усилия можно использовать тензо- или пьезодатчик микроперемещений, имеющий на выходе электрический сигнал. Этот датчик установлен на корпусе 2, закрепляемом на рулевом колесе с помощью самоцентрирующего захвата 1. С корпусом 2 шарнирно связана поворачиваемая относительно него вокруг оси рулевого колеса штанга 7, взаимодействующая с датчиком усилий 8. Сверху корпус 2 закрыт прозрачным диском 3, имеющим радиальные светоотражающие штрихи 4.
Датчик угловых перемещений 1, нормирующий усилитель 4, датчик микроперемещений 2, пороговый усилитель 6, управляющий ключ 10, логический элемент И 8, логический элемент ИЛИ 11, счетчик импульсов 12, цифровой индикатор 15 и индикатор "Измерение" 16 образуют цепь измерения люфта. Датчик усилий 3, нормирующий усилитель 5, преобразователь "аналог - частота" 7, датчик микроперемещений 2, пороговый усилитель б, управляющий ключ 10, логический элемент ИЛИ 11, счетчик импульсов 12, цифровой индикатор 15 образуют цепь измерения усилий. Датчик 14 эталонных сигналов, счетчик 12 импульсов, компаратор 13 и индикатор "Превышение" образуют цепь задавания и сравнения нормативов диагностических параметров.
Ключ 10 вырабатывает импульсы, управляющие логическими элементами И 8 и 9, включая и выключая измерительные цепи в зависимости от диагностируемого параметра (люфта или усилия). Кроме того, управляющий ключ 10 вырабатывает управляющие сигналы для индикатора "Измерение" 16, счетчика импульсов 12 и цифрового индикатора 15. Управление подачей сигналов от ключа 10 производят с помощью его переключателя, имеющего три положения: первые два соответствуют режиму измерения усилия на рулевом колесе при выборе люфта; третье - режиму измерения усилия на рулевом колесе при повороте управляемых колес.
Предпочтительное положение рулевого колеса при контроле соответствует движению автомобиля по прямой. Вращение рулевого колеса осуществляют за силоизмерительную штангу устройства, прикладывая усилие в направлении, перпендикулярном оси штанги в плоскости рулевого колеса.
При первом положении переключателя блока управления происходит обнуление счетчика 12, цифрового индикатора 15 и выключение индикатора "Измерение" 16. В этом режиме с началом поворота рулевого колеса из исходного положения в любую сторону начинает выбираться люфт, при этом управляющий ключ 10 дает разрешающий сигнал на вход логического элемента И 9, а сигнал с датчика усилий 3 через нормирующий усилитель 5, преобразователь "аналог - частота" 7, логический элемент И 9 и логический элемент ИЛИ 11 поступает на счетчик импульсов 12. После отработки этого сигнала управляющий ключ 10 подает разрешающий сигнал на цифровой индикатор 15, на котором выдается значение усилия на рулевом колесе при выборе люфта.
Измеренное значение усилия с выхода счетчика импульсов 12 подается (одновременно с поступлением на цифровой индикатор 15) на вход компаратора 13, в котором сравнивается с нормативным (предельным или допустимым) значением, поступающим с выхода датчика эталонных сигналов 14. В случае превышения заданного значения с выхода компаратора 13 на индикатор "Превышение" 17 подается соответствующий сигнал.
Когда люфт в этом режиме измерения полностью выбран, управляемые колеса начинают поворачивать, воздействуя на датчик микроперемещений 2, сигнал с которого поступает на пороговый усилитель 6.
При достижении порогового значения перемещения, определяемого пороговым усилителем, запрещающий выходной сигнал с последнего через управляющий ключ 10 поступает на управляющий вход логического элемента И 9, после чего включается цепь измерения люфта.
Одновременно происходит обнуление счетчика импульсов 12 и через заданный промежуток времени - цифрового индикатора 15.
Обнуление индикатора указывает на полный выбор люфта в направлении вращения рулевого колеса.
После этого переключатель управляющего ключа переводят во второе положение и начинают вращать рулевое колесо в обратном направлении. Когда рулевое колесо возвратится в начальное состояние измерения люфта, прекращается воздействие колес на датчик микроперемещений 2.
Последний через пороговый усилитель 6 подает сигнал на управляющий ключ 10, который формирует разрешающий сигнал для логического элемента И 8. В результате импульсы с датчика угловых перемещений 1 через нормирующий усилитель 4, открытый логический элемент И 8 и логический элемент ИЛИ 11 поступают на счетчик импульсов 12, где происходит счет импульсов, отражающих люфт. После выбора люфта вновь срабатывает датчик микроперемещений 2 и на выходе порогового усилителя 6 и соответственно на выходе управляющего ключа 10 появляется запрещающий сигнал для логического элемента И 8, выключающий индикатор "Измерение" 16, и разрешающий сигнал на цифровом индикаторе 15. Последний при этом выдает значение измеренного люфта.
Измеренное значение люфта с выхода счетчика импульсов 12 одновременно поступает на цифровой индикатор 15 и на вход компаратора 13, в котором сравнивается с нормативным значением, поступающим с выхода датчика эталонных сигналов 14. В случае превышения заданного значения с выхода компаратора 13 на индикатор "Превышение" 17 подается соответствующий сигнал.
Для измерения усилия на рулевом колесе при повороте управляемых колес переключатель управляющего ключа устанавливается в третье положение.
Когда по окончании выбора люфта срабатывает датчик микроперемещений 2, то по его сигналу через пороговый усилитель 6 управляющий ключ 10 дает разрешающий сигнал на вход логического элемента И 9.
При этом сигнал с датчика усилий 3 через нормирующий усилитель 5, преобразователь "аналог - частота" 7, логический элемент И 9 и логический элемент ИЛИ 11 поступает на счетчик импульсов 12 и далее по разрешающему сигналу блока управления на цифровой индикатор 15.
Как и в случае измерения усилия, при выборе люфта осуществляют сравнение полученного значения с соответствующим нормативным.
Диагностический интерфейс шин данных J533.
Исполнительные элементы:
Клапан регулировки демпфирования переднего левого колеса N336;
Клапан регулировки демпфирования переднего правого колеса N337;
Клапан регулировки демпфирования заднего левого колеса N338;
Клапан регулировки демпфирования заднего правого колеса N339.

Рисунок 33 - Диагностический интерфейс шин данных J533.
3.3 Устройство и работа предлагаемых устройств управления
Блок управления системы электронного регулирован ия демпфирования J250.
Блок управления J250 установлен в багажном отделении за правой боковой накладкой (Passat CC).
Он обрабатывает сигналы датчиков дорожного просвета автомобиля G76, G78, G289 и датчиков ускорения кузова G341, G342, G343 и постоянно рассчитывает с учетом дорожного покрытия, ситуации на дороге и запросов водителя оптимальное напряжение для каждого из 4-х амортизаторов.
Он регулирует степень демпфирования путем регулировки подаваемого напряжения (прибл. 0,24 A…2,0 A) за несколько миллисекунд.
Блок управления усилителя рулевого управления J500.
Для системы адаптивного управления ходовой части DCC используются телескопические амортизаторы, на которых регулировка усилия демпфирования осуществляется с помощью установленного на амортизатор с наружной стороны регулируемого клапана с электроприводом.
Путем изменения напряжения можно за несколько миллисекунд с помощью регулируемого клапана адаптировать усилие демпфирования к выбранному режиму демпфирования.
3 датчика дорожного просвета автомобиля передают сигналы, которые вместе с сигналами 3-х датчиков ускорения кузова требуются для расчета необходимого режима демпфирования. Параметрические поля всех режимов демпфирования занесены в блок управления системы электронного регулирования демпфирования J250.
Амперметр изображен на рисунке исключительно для наглядного изображения подачи напряжения на регулируемый клапан (Показания амперметра при режиме „Normal“).
Для режимов „Normal“, „Sport“ и „Comfort“ задается не одно строгое значение напряжения, а диапазон значений (желтая зона шкалы амперметра).
На следующих графических изображениях возможных режимов работы регулируемого клапана для простоты показано только среднее положение стрелки амперметра в ж¸лтой зоншкалы).
Регулируемый клапан установлен с боку на амортизатор так, что масло из кольцевого канала амортизатора течет к клапану. Вытекающее из регулируемого клапана масло подается в рабочую камеру 2 амортизатора.
Перемещение клапана осуществляется за счет подачи напряжения питания на катушку (0,24 A до макс. 2,0 A) и возникающих в связи с этим изменений внутри клапана. Поступающее от амортизатора масло перемещает главную заслонку в зависимости от положения регулируемого клапана в соответствующее горизонтальное положение, чтобы заданное количество масла могло поступать по обратным каналам обратно в амортизатор.
Перемещение главной заслонки в заданное положение обеспечивается путем регулировки разности давлений (по сравнению с давлением масла, вытекающего из амортизатора) во внутреннем управляющем объеме. Разность давлений регулируется с помощью предварительно заданного усилия открывания проходного сечения между головкой толкателя и управляющей пластиной (предварительного натяжения).
Если предварительное натяжение, напр., увеличивается, то количество вытекающего через главную заслонку, кольцевой зазор и управляющий канал масла уменьшается, давление во внутреннем управляющем объеме увеличивается, а главную заслонку можно только слегка переместить вправо. Это приводит к увеличению степени демпфирования. Уменьшение предварительного натяжения вызывает обратную реакцию системы.
Степень демпфирования уменьшается.

Рисунок 35 - Регулирование
Регулируемый клапан при „нормальной степени демпфирования“
При „нормальной степени демпфирования“ на катушку подается среднее напряжение между 0,24 A и 2,0 A. Якорь со стержнем и головкой толкателя перемещается и регулируется с небольшим предварительным натяжением.
Поступающее от амортизатора масло оказывает давление на главную заслонку и перемещает е¸ в среднее горизонтальное положение, позволяющее подавать среднее количество масла в обратный канал, обратно к амортизатору. Это достигается путем установки среднего предварительного натяжения между головкой толкателя и управляющей пластиной. В соответствии с этим регулируется и разница давлений, а главная заслонка перемещается в среднее горизонтальное положение.
Устанавливается средняя степень демпфирования, не высокая и не низкая.
Регулируемый клапан при „высокой степени демпфирования“.
При „высокой степени демпфирования“ катушка получает напряжение макс. до 2,0 A. Якорь со стрежнем и головкой толкателя отодвигается с максимальным предварительным натяжением влево.
Это приводит к тому, что проходное сечение между управляющей пластиной и головкой толкателя становится меньше, чем при „нормальной степени демпфирования“. Разница давлений во внутреннем управляющем объеме увеличивается, а главная заслонка перемещается в горизонтальное положение, обеспечивающее подачу меньшего количества масла через обратный канал к амортизатору, чем при „нормальной степени демпфирования“.
Это приводит к увеличению степени демпфирования.
Это типичное состояние регулируемого клапана, обеспечивающее ощутимое изменение динамических характеристик автомобиля.
При „низкой степени демпфирования“ электромагнит получает напряжение, равное, напр., 0,24 A, и в соответствии с этим получает вместе со стержнем и головкой толкателя небольшое предварительное натяжение.
Головка толкателя перемещает управляющую заслонку на соответствующее расстояние влево и обеспечивает кольцевой зазор более маленького сечения. Масло поступает через зазор и прилегающий управляющий канал обратно к амортизатору.
Это уменьшение предварительного натяжения головки толкателя приводит к увеличению проходного сечения между управляющей пластиной и головкой толкателя. Разность давлений во внутреннем управляющем объеме уменьшается.