Зубчатые передачи применяют при любом расположении осей колес. При параллельном расположении осей колес используют цилиндрическую передачу, при пересекающихся осях — коническую передачу, при скрещивающихся осях валов — винтовые, гипоидные, спироидные (рис. 3.1).
Зубчатые передачи выполняют в основном закрытыми — работающими в корпусе и со смазкой.
Открытые передачи, работающие на воздухе без смазки, обычно отличаются крупными размерами. Для них характерно ускоренное изнашивание.
В зависимости от расположения зубьев на колесе различают прямозубые, косозубые, шевронные колеса и колеса с круговыми зубьями.
| Рис. 3.1. Типы зубчатых передач: цилиндрические с внешним зацеплением (а — с прямозубыми колесами; б — с косозубыми колесами; в — с шевронными колесами); г — шестерня — рейка; д — цилиндрические с прямыми зубьями и внутренним зацеплением; е — цилиндрическая винтовая; конические передачи (ж — с коническими прямозубыми колесами; з — с коническими косозубыми колесами; и — с круговыми зубьями; к — гипоидная передача со скрещивающимися валами); с — расстояние между осями валов |
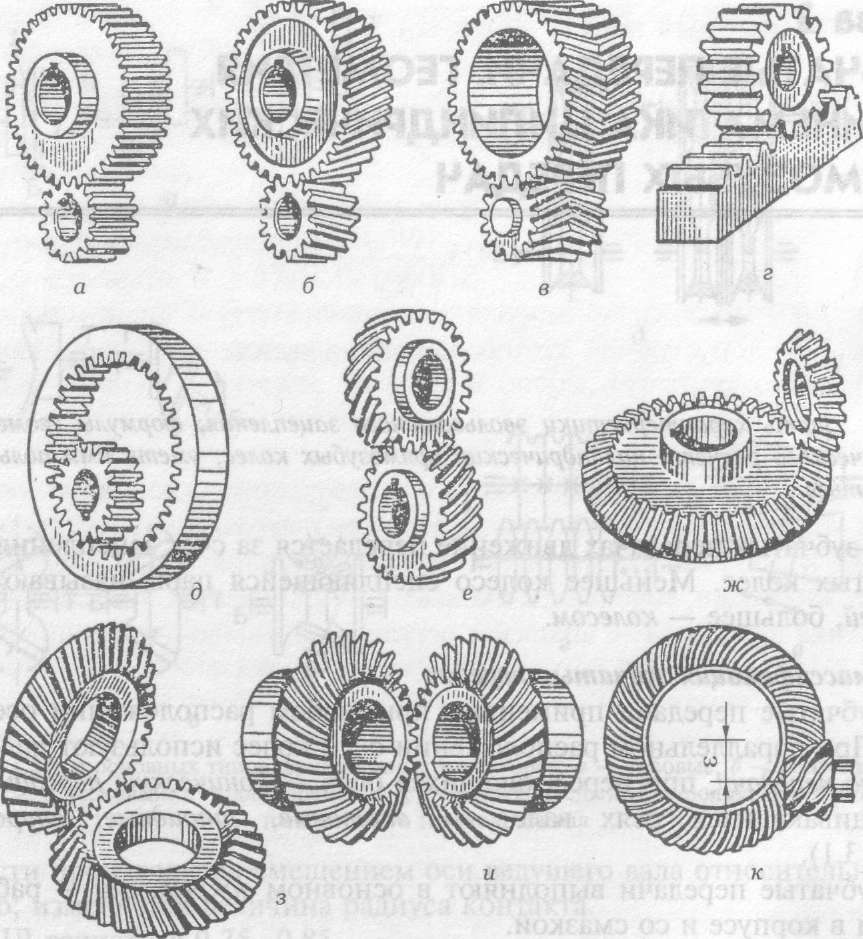
Винтовые передачи (зубчатые цилиндрические передачи с винтовым зубом) из-за повышенного скольжения и низкой нагрузочной способности применяют ограниченно (рис. 3.1, e).
Для преобразования вращательного движения в поступательное применяют передачу шестерня — рейка (рис. 3.1, г).
В зависимости от формы профиля зубьев передачи делятся на передачи с эвольвентными зубьями и зубьями очерченными дугами окружности (передача Новикова).
В зависимости от взаимного положения колес различают передачу с внешним (рис. 3.1, а) и с внутренним (рис. 3.1, д) зацеплением. Геометрия и кинематика зубчатых колес
|
|
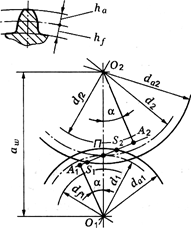
Поверхности взаимодействующих зубьев должны обеспечить постоянство передаточного числа. Профили зубьев должны подчиняться определенным требованиям, вытекающим из основной теоремы зацепления: общая нормаль, проведенная через точку касания профилей, делит расстояние между центрами О1 O2 на части, обратно пропорциональные угловым скоростям (рис. 3.2).
Практическое применение получило эвольвентное зацепление благодаря технологичности и достаточно высокой несущей способности. Рабочими профилями зубьев колес служит эвольвента. Каждое эвольвентное колесо нарезано так, что может сцепляться с соответствующими колесами, имеющими любое число зубьев.
| Рис. 3.2. Геометрия цилиндрической передачи: П — полюс зацепления; А1А2 — линия зацепления; S1S2 — длина активной линии зацепления; α — угол зацепления; aw — межосевое расстояние; d1, d2 — диаметры делительных окружностей; ha, hf — высота головки и ножки зуба соответственно; dj1, df2 — диаметры окружностей впадин; da1, da2 — диаметры окружностей выступов |
 Все геометрические параметры зубчатых передач стандартизированы.
Все геометрические параметры зубчатых передач стандартизированы.
С кинематической точки зрения зацепление зубчатых колес эквивалентно качению без скольжения двух окружностей с диаметрами O2П и О1П.
В качестве основного параметра зубчатых колес принят модуль.
Модуль — расчетная величина, равная отношению окружного шага зубьев рt по делительной окружности к числу п:
Шаг зацепления Pt — расстояние между двумя одноименными профилями соседних зубьев по делительной окружности. Шаги сцепляющих зубьев должны быть равны.
|
|
Делительная окружность делит зуб на две части: головку и ножку.
Геометрия цилиндрических колес определяется несколькими концентрическими окружностями.
Начальные окружности — это сопряженные окружности двух сцепляющихся колес. Их радиусы равны О1П и П02. Начальные окружности относятся только к зацеплению пары колес. При изменении межосевого расстояния О1О2 диаметры начальных окружностей также меняются.
Делительная окружность принадлежит каждому отдельно взятому колесу. Делительная окружность является начальной при зубонарезании, при зацеплении колеса с производящей рейкой. У большинства зубчатых передач делительные окружности совпадают с начальными: