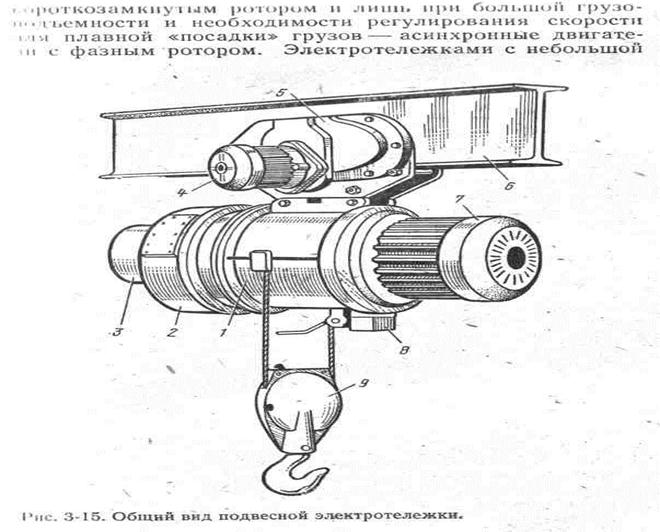
Для подъёма и перемещений грузов в цехах промышленных предприятий, на заводских территориях и складах широко применяются подвесные электротележки грузоподъёмностью от 0,1 до 5 т. Они меньше мостовых кранов, что сокращает раз-меры промышленных зданий, а их обслуживание не требует квалифицированного персонала. В подвесных электротележках (рис. 3-15) в качестве грузоподъёмного ме-ханизма применяется электроталь, состоящая из грузового канатного барабана1, при-водимого но вращение двигателем 7 через редуктор 2. С валом привода подъёма связаны диски электромагнитного тормоза 3. Электроталь смонтирована на ходовой тележке 5, колеса которой опираются на нижние полки двутавровой балки – моно-рельса 6 и приводятся в движение от двигателя 4 через цилиндрический редуктор (небольшие электротележки не имеют этого двигателя и перемещаются вручную).
Движение крюка 9 вверх ограничивается конечным выключателем 8. Перемещение тележки по монорельсу также ограничивается конечными выключателями. Ток к двигателям подводится от контактных проводов (троллеев), подвешенных на уровне монорельса, при помощи токосъёмников, укрепленных на ходовой тележке.
Подвесными электротележками оснащаются и кран балки - лёгкие мостовые краны грузоподъёмностью не более 5 т. Мост кран-балки, имеющий механизм пере-мещения с электроприводом, выполнен в виде одной балки, по которой движется ходовая электротележка.
Для привода подвесных электротележек, как правило, применяются трёхфаз-ные асинхронные двигатели с
скоростью перемещения (0,2-0,5 м/с), имеющими привод от двигателей с коротко-замкнутым ротором, обычно управляют с уровня пола (земли) при помощи подвесных кнопочных станций. В подвесных тележках и кран балках с кабиной для опе-ратора (при скорости движения 0,8-1,5 м/с) двигателями с фазным ротором управ-ляют посредством контроллеров.
На рис. 3-16 показана принципиальная электрическая, схема подвесной элек-тротележки с приводом от асинхронных двигателей с короткозамкнутым ротором. Напряжение на схему подается с троллеев, подключён-

|
ных к сети через автоматический выключатель ВА. Двигателями подъёма Д1 и пере-движения; Д2 управляют при помощи реверсивных магнитных пускателей КП,КС, (Подъём-Спуск) и КВ, КН (передвижение Вперёд - Назад), катушки которых вклю-чаются с помощью кнопок КнП, КнС и КнВ, КнН. На электротележках не применяют шунтирования замыкающих контактов кнопок вспомогательными контактами, поэтому работа каждого двигателя возможна при условии, что соответствующая кнопка удерживается в нажатом положении. Это устраняет опасность ухода тележки от оператора, так как при отпускании кнопки двигатель отключается от сети. Для предотвращения, одновременного включения пускателей КП и КС, КВ и КН служит блокировка размыкающими вспомогательными контактами пускателей.
Режим работы двигателей подвесных электротележек зависит от их назначения. Если грузы перемещают на небольшие расстояния, то двигатели работают в повторно-кратковременном режиме (например, у тележек, обслуживающих участки цехов или складов). Для тележек, транспортирующих грузы по территории завода на относительно большие расстояния, режимы работы двигателей подъёма и перемещения различны: для первых характерен кратковременный режим, для вторых — длительный. Мощность двигателей подъёма и перемещения подвесных тележек определяется так же, как для двигателей механизмов мостовых кранов.