Навигация по датчикам расстояния (Ультразвуковая навигация на основе Arduino)
Это устройство предназначено для построения карты местности, точнее закрытого помещения (комнаты, например) вместе с находящимися в нем предметами.
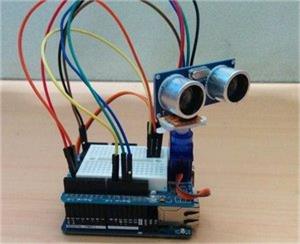 |
Рисунок 1. Ультразвуковая навигация
Принцип работы данного системы навигации заключается в сканировании вращающимся датчиком ультразвука окружающих предметов. Результат которого может быть преобразован в карту местности:
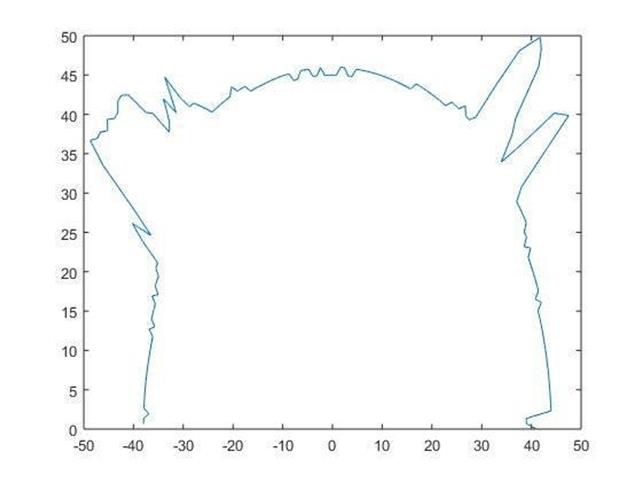
Рисунок 2. Результат обработки информации от датчика ультразвука
Как мы видим, результат сканирования достаточно грубо передаёт очертания помещения, так как датчик ультразвука сам по себе работает с погрешностями и очень плохо определяет дальность в зависимости от угла между датчиком и предметов (ультразвук отражается). А также точность показаний зависит от материала поверхности (меняются свойства отражения и поглощения ультразвука).
Данный способ навигации широко применяется в простейших роботах (роботы-пылесосы), задачей которых является объезд препятствий.
 |
Рисунок 3. Маршрут робота-пылесоса
Навигация при помощи модуля гироскоп-акселерометра (MPU-6050)
Акселерометр — это прибор, позволяющий измерять ускорение тела под действием внешних сил.
В основе этого модуля лежит микросхема MPU6050, в которой размещаются сразу два датчика: акселерометр и гироскоп. На плате уже имеется вся необходимая обвязка, а также преобразователь напряжения.
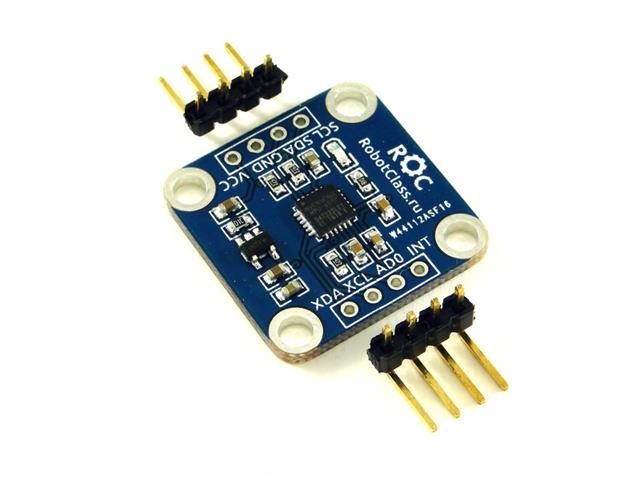
Рисунок 4. Акселерометр
Модуль датчика помогает определять место и перемещение в пространстве. Измеряются дифферент и углы крена посредством вектора силы тяжести и скорости в процессе вращения. Также включена функция измерения температурного режима. Перемещение определяется линейным ускорением и угловой скоростью. Полная картина рисуется по 3 осям.
|
|
Характеристики модуля MPU6050 ROC:
· напряжение питания: от 3,5 до 6 В;
· потребляемый ток: 500 мкА;
· ток в режиме пониженного потребления: 10 мкА при 1,25 Гц, 20 мкА при 5 Гц, 60 мкА при 20 Гц, 110 мкА при 40 Гц;
· диапазон: ± 2, 4, 8, 16g;
· разрядность АЦП: 16;
· интерфейс: I2C (до 400 кГц).
На плате имеется 8 контактов:
· VCC — положительный контакт питания;
· GND — земля;
· SDA — линия данных I2C;
· SCL — линия синхроимпульсов I2C;
· INT — настраиваемое прерывание;
· AD0 — I2C адрес; по-умолчанию AD0 подтянут к земле, поэтому адрес устройства — 0x68; если соединить AD0 к контактом питания, то адрес изменится на 0x69;
· XCL, XDA — дополнительный I2C интерфейс для подключения внешнего магнитометра
Подключение MPU6050 к Ардуино
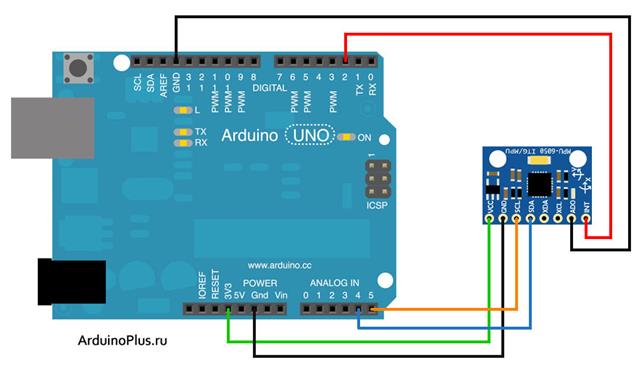
Рисунок 5. Подключения датчика к плате Arduino
Для работы программы потребуются библиотеки: MPU6050.
Загружаем программу на Ардуино и открываем окно графика. Поворачиваем датчик вокруг оси X на 90 градусов в одну сторону, потом на 90 в другую. Получится примерно такая картина.
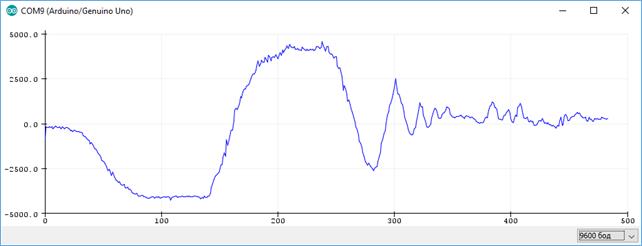
Рисунок 6. Вывод информации от модуля гироскоп-акселерометра
На графике хорошо видно, что при наклоне оси Y вертикально, акселерометр выдает значения близкие к четырём тысячам. Откуда берется это число?
Дело в том, что датчик MPU6050 позволяет настраивать точность измерений. Можно выбрать один из четырех классов точности: ±2G, 4G, 8G и 16G, где 1G — это одна земная гравитация. Используемая нами библиотека по-умолчанию настраивает датчик на диапазон ±8G (прим. по ссылке внизу статьи библиотека по-умолчанию устанавливает ±2G).
|
|
С другой стороны, MPU6050 имеет 16 разрядный АЦП. 2 в степени 16 даст нам число 65 536. Поскольку датчик может измерять и отрицательное и положительное ускорение, то он будет выдавать нам числа от -32768 до +32768.
Сложив эти два факта вместе получаем, что при таких настройках 1G будет равен числу 4096 (ну а -1G равен числу -4096). Это вполне совпадает с наблюдаемыми на графике значениями!
Следующий шаг — преобразование этих странных чисел в привычные нам углы, измеряемые в градусах.
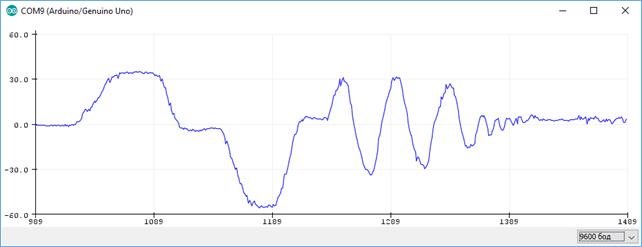
Рисунок 7. Обработанная информации от модуля гироскоп-акселерометра
Ну вот, мы получили уже что-то пригодное для дальнейшего использования. Видно, что датчик поворачивался сначала на 30 с лишним градусов в одну сторону, потом примерно на 60 в другую.
Для получения координат нужна будет библиотека - Kalman (Gy-521, mpu6050), которая преобразует показания координат X и Y.
Преимущества использования акселерометра:
1. Акселерометр позволяет замерять шаги. Акселерометр способен отслеживать резкие движения устройства, а в зависимости от его настройки и чувствительности, считать некоторые из них за шаг.
2. Измеряет поворот экрана. Здесь уже оба устройства работают в паре. Ведь когда вы поворачиваете смартфон набок, картинка должна изменить свою ориентацию для пользователя, и лишь с помощью гироскопа удаётся определить угол наклона, под которым ПО это должно будет сделать.
3. Компас, карты и навигация. Акселерометр с гироскопом позволяют определить ориентацию устройства в пространстве, что необходимо в различных приложениях для мобильной навигации.