Исходным материалом для разработки принципиальных электрических схем (ПЭС) является схема автоматизации (СА).
Любая ПЭС представляет собой сочетание отдельных, достаточно простых электрических цепей, которые в заданной последовательности выполняют ряд типовых операций: передачу командных сигналов от органов управления или измерения к исполнительным органам, усиление или размножение командных сигналов, блокировку командных сигналов и т.п.
Проектирование ПЭС основывается на общих принципах рационального построения электрических схем, обеспечивающих высокую надежность, простоту и экономичность, четкость действия при аварийных режимах, удобство оперативной работы и эксплуатации.
Разработка ПЭС обычно производится в следующем порядке:
- формулировка на основании СА технических требований к ПЭС;
- разработка условий и последовательности действия элементов схемы;
- формирование элементарных цепей, обеспечивающих требуемые действия;
- объединение элементарных цепей в общие цепи;
- выбор аппаратуры и электрический расчет параметров отдельных элементов(сопротивлений обмоток реле, нагрузки контактов и т.п.);
- проверка схемы с целью выявления ложных цепей или неправильностей работы при повреждениях элементарных цепей или контактов.
Схемы выполняют без соблюдения масштаба. При этом все цепи управления и сигнализации изображаются горизонтальными линиями в порядке действия аппаратов во времени, начиная с момента нахождения их в исходном состоянии. Условные графические обозначения по ГОСТу рекомендуется выполнять в соответствии в размерами, указанными в приложении. Допускается поворачивать условные обозначения на угол 90° или 180°.
Для простоты и наглядности в схемах используется принцип развертки, основывающийся на том, что все элементы аппаратов и приборов, действующие в разных цепях, располагаются вне зависимости от их конструктивной связи, в соответствии с логикой действия схемы и, по возможности, последовательностью действия отдельных ее элементов;
В цепях управления следует применять напряжение 220 В, если применение пониженного напряжения не диктуется требованиями безопасности, в 3-х фазных цепях с заземленной нейтралью питание цепей управления следует производить фазным напряжением, присоединяя концы катушек, реле, магнитных пускателей и других аппаратов к нулевому проводу.
Пониженное напряжение следует применять, если в схеме имеются высокочувствительные слаботочные реле, либо при наличии большого количества аппаратов, когда существенное значение имеют габариты реле и их стоимость. Пониженное напряжение следует применять также во всех случаях, когда более высокое напряжение опасно для обслуживающего персонала.
Постоянный ток в цепях управления и сигнализации следует применять в схемах со слаботочной аппаратурой, когда представляется возможность уменьшить число контактов за счет применения полупроводниковых выпрямителей.
При составлении принципиальной электрической схемы необходимо руководствоваться также следующими соображениями:
1. Схему необходимо составлять по возможности, из ряда простых электрических цепей;
2. Число аппаратов, находящихся постоянно под напряжением, должно быть минимальным;
3. При переключениях под нагрузкой необходимо стремиться к облегчению работы контактов, что может быть достигнуто за счет:
· отключения каждым контактом только минимально необходимого числа цепей;
· переключения цепей без разрыва цепи (схему желательно составлять так, чтобы возможно большая часть контактов не производила непосредственно переключающих операций, а служила бы для подготовки тех или иных цепей на включение или отключение);
4. Количество последовательно включенных контактов в цепях управления должно быть минимальным (для надежности работы цепей управления).
Принципиальные электрические схемы составляются и вычерчиваются с применением условных графических обозначений по ГОСТу.
Принципиальные электрические схемы рекомендуется изображать на чертеже с горизонтальным расположением цепей, но разрешается располагать эти изображения также и вертикально.
Условные графические обозначения для элементов, не предусмотренные ГОСТом, составляются проектировщиком с учетом принципа работы этих элементов, принятые условные обозначения показываются на чертеже в виде таблицы, где даются наименование элемента и принятое условное графическое обозначение его.
Контакты, а также все другие переключающие устройства, показываются в нормальном положении, т.е. при таком их действительном положении, когда отсутствует ток во всех цепях данной схемы и внешнее принудительное механическое воздействие на подвижные контакты.
В тех случаях, когда переключающие (коммутирующие) устройства имеют два исходных положения, их изображают на схеме в одном из двух произвольно выбранных положений, что оговаривается соответствующим примечанием.
Контакты приборов, измеряющих, контролирующих или регулирующих какой-либо технологический параметр, изображаются в соответствии с их положением при оптимальном значении параметров.
Например, при сигнализации минимальной и максимальной температур контакты прибора, контролирующего температуру, показываются разомкнутыми, так как процесс ведется на оптимальном (заданном) режиме
Места соединения отдельных электрических цепей друг с другом, а также места соединения силовых цепей с главными шинами на схемах показываются темными точками. Нулевая шина 4-х проводной системы изображается пунктирной линией более тонкой, чем шины силовых цепей, электрические схемы управления располагаются с правой стороны силовых цепей (рис.1)

Рис.1. Правила изображения электрических цепей и их соединений
Цепи управления и сигнализации располагаются горизонтально в порядке последовательности их действия при чтении схемы сверху вниз, элементы цепей управления должны быть расположены друг от друга на расстоянии не менее 10 мм.
На концах линий, питающих участок цепей управления, наносятся перпендикулярные штрихи, показывающие, что все цепи управления предусмотрены этой схемой.
Контакты аппаратов, основной элемент которых показан на другом чертеже, обводятся пунктирной линией, в том числе:
1. Элементы приборов для измерения неэлектрических величин (температуры, давления и т.д.) обводятся пунктирной окружностью диаметром 8мм с указанием номера позиции по функциональной схеме автоматизации. Номер позиции проставляется при горизонтальном начертании над условным графическим обозначением, а при вертикальном - справа от этого обозначения.
2. Элементы электроаппаратов- реле, магнитных пускателей и т.д. - обводятся пунктирными прямоугольниками: для элементов реле - 9х6 мм, а для магнитных пускателей - 4x5. Для каждого элемента делается ссылка на номер чертежа, на котором дана схема включения обмотки данного электроаппарата (рис.2).
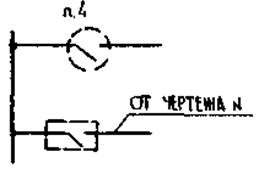
Рис.2. Изображение контактов аппаратов, основной элемент которых показан на другом чертеже
Против каждой цепи управления с правой стороны (как исключение с левой стороны) или внизу схемы в зависимости от ее начертания даются лаконичные поясняющие надписи. Надписи, для цепей, которые не относятся к цепям управления или сигнализации, наносятся по всей ширине без вертикальной полосы ("Цепь контроля напряжения"). Надпись каждой цепи отделяется от соседних надписей линиями в местах разделения этих цепей. Над схемой управления указывается величина напряжения и род тока, которым производится питание цепей управления данной схемы (рис.3).
Каждый элемент ПЭС должен иметь позиционное обозначение (см.приложение), которое проставляют на схеме справа от условного графического изображения или над ним. Позиционное обозначение состоит из двух частей, записываемых без разделительных знаков и пробелов. В первой части, содержащей одну или две буквы латинского алфавита, указывается вид элемента. Вторая часть указывает порядковый номер элемента в пределах элемента данного вида. Например, К1 - реле первое, SВ5 - кнопочный выключатель пятый. Нумерация элементов в схеме возрастает сверху вниз и слева направо. Позиционное обозначение, присвоенное токоприемнику аппарата, распространяется на все его элементы, изображенные на ПЭС. Так, буквенное обозначение реле К5 присваивается как катушке, так и всем его контактам.
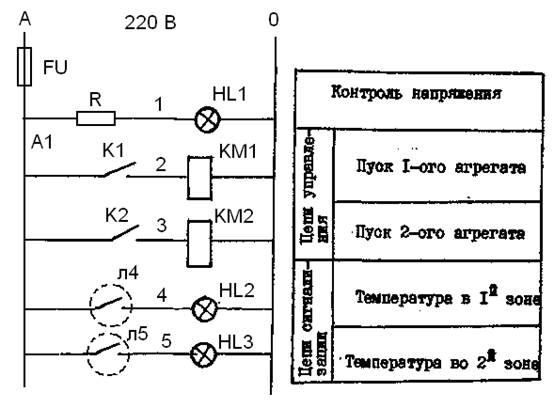
Рис.3. Правила размещения поясняющих надписей
Присвоенные условные обозначения проставляются над графическим изображением при горизонтальном вычерчивании цепей схемы или справа от графического изображения при вертикальном, вычерчивании цепей схемы, а для вращающихся машин (двигателей) они проставляются внутри их графического изображения.
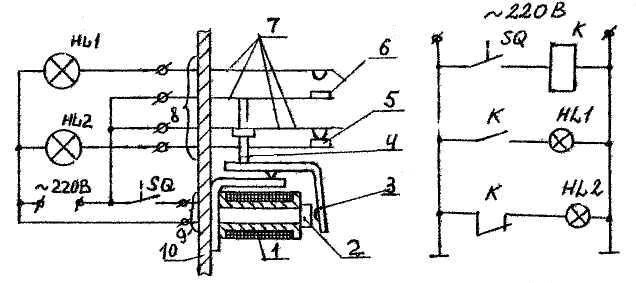
На рис.5а показана схема электромагнитного реле совместно с подключенными к нему внешними цепями, что позволяет уяснить назначение реле и пускателя.
Принцип работы магнитного пускателя и электромагнитного реле идентичен. При подаче определенного значения напряжения на обмотку катушки (1) под действием возникающих магнитных сил якорь (3) притянется к сердечнику (2), и толкатель (4) произведет замыкание (контактов 6) или размыкание (контактов 5) соответствующих контактов. При снятии напряжения с катушки вся система вернется в исходное положение за счет действия контактных пружин (7).
а б
Рис.5. Схема электромагнитного реле.
1 - обмотка катушки; 2 - полюс сердечника; 3 - якорь; 4 - толкатель; 5 - размыкающие контакты; 6 - замыкающие контакты; 7 - контактные пружины; 8 - выводы контактов реле; 9 - выводы контактов катушки; 10 - основание из диэлектрика.
Замыкающие контакты (сокращенно "З" контакты) - когда якорь реле притягивается к сердечнику, эти контакты замыкаются.
Размыкающие контакты (сокращенно "Р" контакты) - когда якорь реле притягивается к сердечнику, эти контакт размыкаются.
Электромагнитные реле предназначены для использования их в цепях сигнализации, управления, блокировки, поэтому их контакты рассчитаны на управление слаботочными цепями (ток до 10 А). Катушки электромагнитных реле могут питаться, как переменным (12±380 В), так и постоянным током (2,5±220 В).
Контакты магнитных пускателей рассчитаны на управление силовыми цепями электроприводов различного оборудования (управляемый ток до 220 А). Катушки магнитных пускателей питаются переменным напряжением 127±380 В.
Указанные различия в назначении реле и магнитных пускателей вызывают их конструктивные различия – контакты магнитных пускателей имеют большую площадь соприкосновения, чем контакты реле. Катушки пускателей имеют большую потребляемую мощность, что обеспечивает большие усилия для переключения контактов.
На рис.5,б показана электрическая схема, построенная на базе электромагнитного реле, показанного на рис.5а.
Реле тепловой защиты имеет буквенное обозначение (КК) и служит для предохранения электрических цепей от токов перегрузки (рис.6).
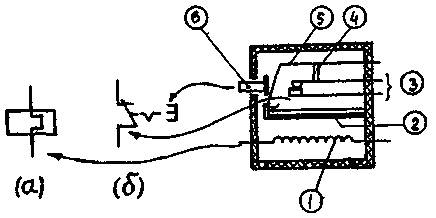
Рис.6. Схема реле тепловой защиты (пояснения в тексте)
Работает тепловое реле следующим образом. Ток нагрузки электродвигателя, пройдя через нагревательный элемент из нихрома (1), нагревает биметаллическую пластинку (2), (в некоторых тепловых реле ток проходит непосредственно по биметаллической пластине, нагревая ее), которая изгибается (вниз) и при токе, на который настроено реле, освобождает пружину (5), которая изгибаясь вверх с помощью тяги (4), размыкает контакты (3). Чтобы вновь включить реле (после остывания биметаллической пластины), необходимо нажать кнопку (6). Изображение реле на электрических схемах состоит из обозначения нагревательного элемента (рис.6,а) и размыкающего контакта с указанием ручного возврата (рис.6,б).
Реле времени (буквенное обозначение КТ) позволяет получить выдержку времени между подачей сигнала на катушку и срабатыванием его контактов. Для удобства расшифровки работы контактов можно исходить из того, что замедление происходит при движении в направлении от дуги к ее центру. Ниже приведен ряд примеров сочетания условных изображений катушек электромагнитных реле времени и их контактов (рис.7).
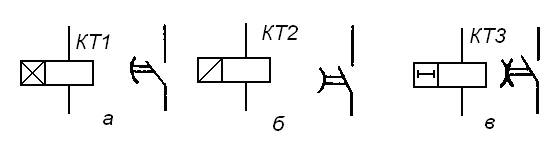
Рис.7. Условное изображение катушки электромеханического устройства, работающего с замедлением при: а – срабатывании; б - отпускании; в – при срабатывании и отпускании.
Автоматические выключатели (буквенное обозначение QF) нашли широкое применение в электрических цепях управления для их подключения к питающим фазам. Включение и выключение их осуществляется вручную. Выключение может быть произведено также автоматически при токах короткого замыкания (в этом случае QF выполняет функции плавких предохранителей) и при токах перегрузки (в этом случае QF выполняет функции реле тепловой защиты). В первом случае рядом с изображением автоматического выключателя ставится знак «J>», во втором «Т°>». Автоматические выключатели более удобны с точки зрения их эксплуатации и техники безопасности, чем плавкие предохранители.
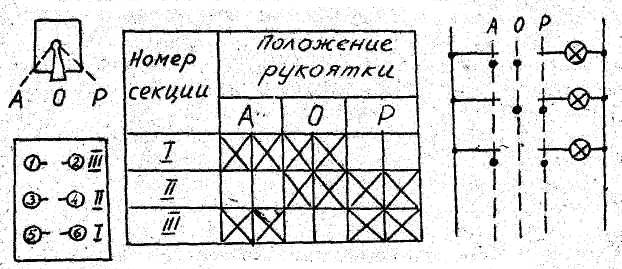
Переключатель цепей управления (буквенное обозначение SA) служит для одновременного переключателя нескольких электрических цепей. Наиболее часто они применяются для выбора одного из 3-х режимов работы: "Автоматическое управление" (Авт.) - "Ручное управление" (Ручн.) - "Выключение" (О). На рис.8 приведена схема переключателя на три положения (а), диаграмма замыкания контактов (б) и один из способов изображения этого переключателя на электрической схеме для управления тремя сигнальными цепями (в).
а б
Рис.8. Схема переключателя на три положения: а - диаграмма замыкания контактов; б - один из способов изображения переключателя на электрической схеме для управления тремя сигнальными цепями

Рис. 9. Внешний вид переключателя цепей управления
Диаграмма (рис.8а) облегчает чтение электрических схем с применением переключателя цепей управления. Крест означает, что контакт замкнут. Таким образом, при положении ручки переключателя "А" замкнуты контакты 1-2 и 5-6, при положении ручки - "0" замкнуты контакты 1-2 и 3-4, при положении ручки "Р" замкнуты контакты 3-4 и 5-6.
Конечные путевые выключатели (SQ) широко используются для управления различными механизмами и устройствами. Они представляют собой переключатели, которые срабатывают при механическом воздействии на толкатель конструктивных элементов кабины или двери лифта корпуса задвижки, ограждения движущихся частей машины и т.д.

Рис.10 Внешний вид конечных путевых выключателей типа ВПК-2110
Асинхронные электродвигатели с короткозамкнутым ротором вследствие простоты конструкции и эксплуатации, а также дешевизны, имеют наиболее широкое применение на предприятиях пищевой промышленности для привода машин и механизмов. На рис.11а представлена схема управления таким электродвигателем. Схема предусматривает защиту цепей от тока короткого замыкания (автоматический выключатель - QF) и токов перегрузки (реле тепловой защиты - KK). Кроме этого, необходимо руководствоваться положением о том, что в целях техники безопасности, а также надежности работы схемы в трехфазных цепях с заземленной нейтралью питание цепей управления следует производить фазным напряжением, присоединяя концы катушек реле, магнитных пускателей и других аппаратов к нулевому проводу. При этом исключается возможность неотключения или самовключения аппаратуры при замыкании "на землю" цепи управления (рис.11б).
Анализ схемы показывает, что если питать цепи управления фазным напряжением (фазы В и С), то при пробое "на землю" в точках 1,2,3, перегорит предохранитель FU, но катушка магнитного пускателя KM остается включенной на фазное напряжение (фаза В - ноль), и пускатель останется включенным (пунктирной линией показаны возникающие при этом "ложные" цепи). В этом случае пускатель не выключается кнопкой "стоп" (двигатель можно остановить в таком случае только выключением автомата - QF). В случае же, если ПМ не работал, то при пробое "на землю" в точках 1,2,3 он включится самопроизвольно и включит электродвигатель (если включен автомат). Схема (см. рис.11а) свободна от этих недостатков - при пробое "на землю" пускатель отключается (напряжение на его катушке в этом случае будет равно 0).
Работа схемы (см.рис.11а) заключается в следующем. Включается автоматический выключатель - QF, затем нажатием на кнопку "Пуск" (SB2) включается под напряжение катушка пускателя магнитного (KМ), что приводит к замыканию 3-х пар "З" контактов в силовой цепи электродвигателя и он начинает вращаться, а также к замыканию "З" контакта, блокирующего кнопку "Пуск".

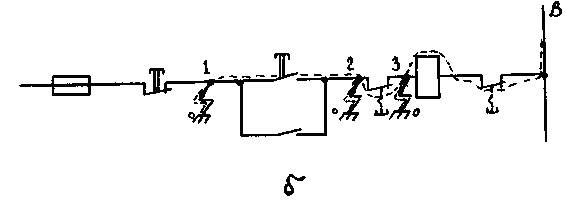
Рис.11.
Кнопку "пуск" теперь можно отпустить, контакты ее разомкнутся, но цепь питания катушки КМ не прервется за счет работы блокирующих контактов КМ. Остановка электродвигателя осуществляется в обратном порядке: нажимается кнопка "Стоп", обесточивается катушка КМ, размыкаются его контакты и обмотки электродвигателя обесточиваются. Аварийный останов электродвигателя может быть осуществлен в следующих случаях: замыкание "на землю" или между собой фаз А,В,С, в этом случае сработает автоматический выключатель QF и выключает цепи питания электродвигателя; пробой "на землю" в цепи управления пускателем магнитным (в этом случае КМ отключается и выключает силовую цепь питания электродвигателя), в случае перегрузки электродвигателя срабатывает одно из РТ, что приводит к размыканию их контактов и, как следствие, к обесточиванию катушки КМ.
Для изменения вращения на противоположное (для схемы рис.12б) сначала необходимо нажать на кнопку "Стоп" (SB1), тем самым выключается работающий КМ, после этого нажатием на кнопку "Назад" (SB2) включается КМ2. Если по этой схеме оператор забудет нажать перед реверсом на кнопку "Стоп" и выключить работающий КМ1, то включение КМ2 не произойдет, т.к. в его цепи находится "Р" контакт КМ1.
В производственных условиях предусматривают управление электроприводами из двух мест – с местного и центрального постов управления. На рис. 13 приведена схема управления электроприводами запорной арматуры с односторонней муфтой ограничения крутящего момента при управлении из двух мест. Выбор режима управления осуществляется ключом SA: Д – дистанционное, М – местное, Н – нейтральное. Ключ выбора режима SA и лампы, сигнализирующие положение запорного устройства и срабатывания муфты ограничения момента, устанавливают на центральном щите.
Для местного управления электроприводом предусмотрены кнопки SB2, SB4, SB6. Для дистанционного управления – SB1, SB3, SB5. После включения одного из пускателей контакты кнопок SB3-SB6 шунтируются соответствующими блок-контактами включенного пускателя, а кнопка может быть отпущена.
При достижении запорным органом крайнего положения "открыто" ("закрыто") пускатель отключается переключающим контактом конечного выключателя SQ1 (SQ2), который одновременно включает соответствующую сигнальную лампу. В случае перегрузки срабатывает муфта ограничения крутящего момента – конечный выключатель SP.
Для отмены ошибочно поданной команды следует отключить кнопкой SB1 или SB2 ранее включенный пускатель, а затем нажатием кнопки SB3 (SB4) или SB5 (SB6) установить запорное устройство в нужное положение.
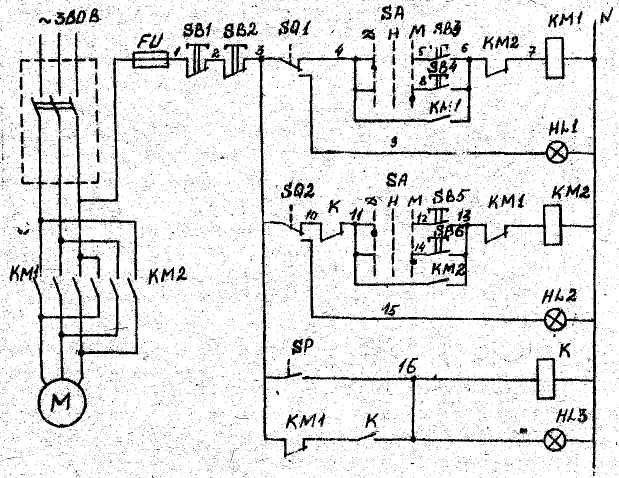
Рис.13. Схема управления электроприводами запорной арматуры с односторонней муфтой ограничения крутящего момента при управлении из двух мест
В схемах автоматического управления предусматривают два режима работы: автоматический и ручной (дистанционный или местный), выбираемые также посредством ключа SA.
Аварийная сигнализация
По своему назначению сигнализация делится на рабочую, предупреждающую и аварийную.
При нарушении режима работы схема сигнализации может обеспечивать подачу звукового и светового сигналов. Звуковой сигнал служит для привлечения внимания обслуживающего персонала и выполняется, как правило, общим для всех световых сигналов. Звуковой сигнал снимается дежурным персоналом, а световой - остается включенным до устранения причины, вызвавшей появление сигнала.
Различают схемы сигнализации без повторности действия и с повторностью действия звукового сигнала.
В схемах без повторности действия звукового сигнала при замыкании любого из сигнальных контактов загорается соответствующий световой и подается звуковой сигнал. Если после отключения звукового сигнала соответствующий ему световой сигнал еще сохраняется, то замыкание других сигнальных контактов вызывает лишь появление дополнительных световых сигналов без звука.
В схемах с повторностью действия звукового сигнала замыкание любого из сигнальных контактов, независимо от состояния остальных контактов, вызывает появление соответствующего светового и одновременно с ним звукового сигналов.
Рекомендуется выбирать следующий цвет световой сигнализации:
- красный цвет - аварийное состояние;
- зеленый цвет- нормальное состояние;
- желтый цвет - предупредительный сигнал;
- белый цвет - разные производственные сигналы.
При выборе напряжения питания сигнальных ламп необходимо учитывать, что уменьшение напряжения питания сигнальных ламп на 10% по сравнению с номинальным, увеличивает срок службы ламп в 3 раза. Как показывает практика, световой поток сигнальных ламп может быть уменьшен без ущерба для визуального восприятия на 30-50% от номинального, что соответствует уменьшению напряжения питания ламп на 25%. Поэтому в схемах сигнализации целесообразно последовательно с лампами включать сопротивление, либо выбирать лампы на напряжение, несколько превышающее номинальное (например, на 60 В при напряжении 48 В).
На рис.14 приведена схема световой и звуковой сигнализации без повторности действия звукового сигнала.
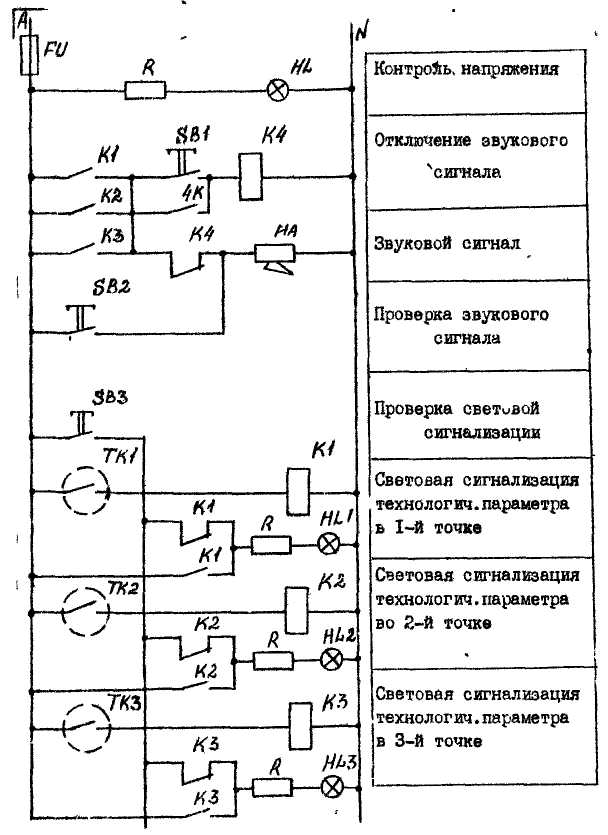
Рис.14. Схема световой и звуковой сигнализации без повторности действия звукового сигнала
При замыкании одного из технологических контактов (1ТК, 2ТК, 3ТК и т.д.) срабатывают промежуточные реле К, включающие своими "3" контактами соответствующие сигнальные лампы. Одновременно включается звуковая сигнализация, которая может быть отключена нажатием на кнопку отключения сигнала (SB1). При этом включается реле отключения сигнала (К4), которое своими "Р" контактами выключает звуковой сигнал.
Для проверки исправности звуковой и световой сигнализации применяются кнопки проверки звука (SB2) и кнопка проверки световой сигнализации (SB3).
На рис.15 приведен пример схемы звуковой и световой сигнализации с повторностью действия. В отличие от схемы рис.14 здесь для каждого технологического сигнала имеется свое реле отключения сигнала (K3, K4) и общее реле (K5).
Схема работает следующим образом. Например, при срабатывании технологического контакта 2ТК включается реле K2, которое своими "3" контактами подключает сигнальную лампу HL2 и звуковой сигнал. Для отключения звукового сигнала нажимают на кнопку SB1, включается K5, которое своими "3" контактами включает K4, последнее блокирует "3" контакт K5 и отключает своими "Р" контактами звуковой сигнал. Световой сигнал (как и в схеме рис.13) остается включенным до размыкания соответствующего технологического контакта (2ТК).
В случае замыкания первого технологического контакта (1ТК) происходит загорание сигнальной лампы HL1, и включается звуковой сигнал, который можно снова отключить кнопкой SB1.
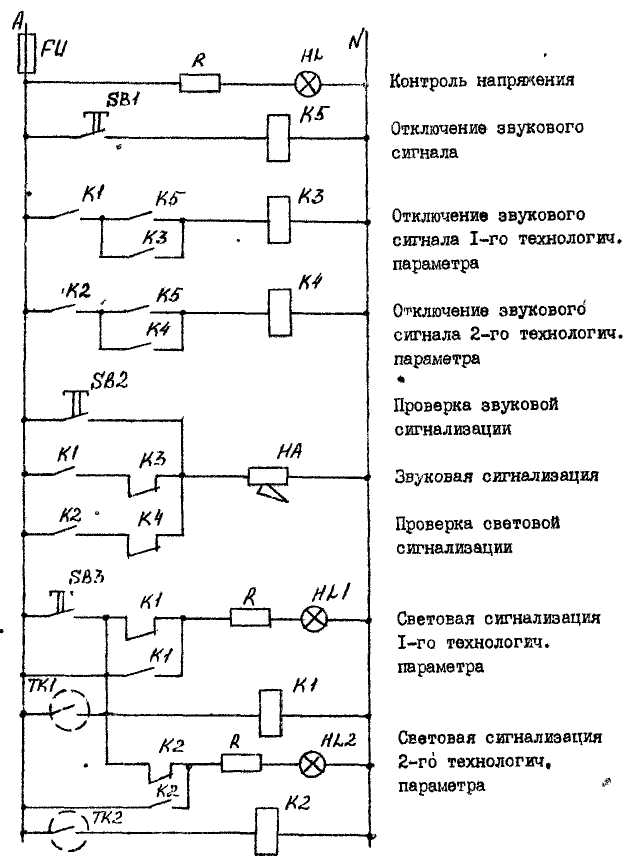
Рис.15. Схема звуковой и световой сигнализации с повторностью действия
Задача 1. Составить принципиальную электрическую схему управления тремя асинхронными нереверсивными электродвигателями, которая предусматривает: общий пуск и останов всех электродвигателей; пуск электродвигателей последовательно:
1дв + 2дв + 3дв - 1дв, при этом 1-й двигатель включается кнопкой "пуск", остальные электродвигатели включаются автоматически: 1-й двигатель включает 2-й, 2-й включает 3-й, 3-й выключает 1-й двигатель.
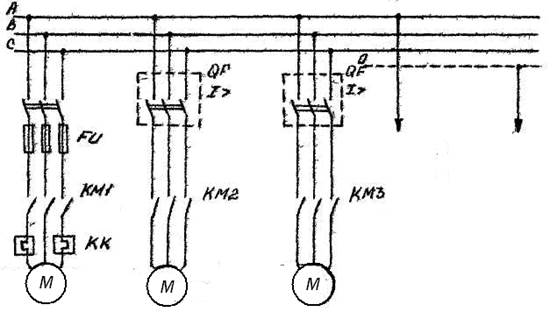
На рис.16 представлены принципиальные электрические схемы, реализующие поставленные задачи. На рис.16а представлена схема управления силовыми цепями электродвигателей, на рис.16б представлена схема управления пускателями магнитными и световой сигнализацией.
Для различных типов КМ число его контактов может быть различным, однако, большинство нереверсивных КМ имеет 3 пары основных "3" контактов и одну пару "З" блок-контактов (для блокировки кнопки "Пуск"), что в ряде случаев бывает недостаточно для управления электрическими цепями, в этих случаях применяют различные схемы размножения числа контактов магнитных пускателей. В рассматриваемых примерах используются схемы с применением промежуточных реле (K), контакты которого являются дополнением к контактам КМ.
Работа схем осуществляется в следующем порядке.
Нажатием на пусковую кнопку SB2 включается катушка KM1, что приводит к замыканию 4-х его "З" контактов (3 пары "З" контактов включают силовую цепь 1М, одна пара "З" контактов блокирует кнопку "Пуск"). Одновременно с включением катушки KM1 включается катушка K1, "З" контакты которого включают цепь питания катушек KM2, К2 и сигнальной лампы HL1. Срабатывание контактов KM2 и K2 вызывает включение двигателя (2М), сигнальной лампы (HL2), а также катушек KM3 и K3, что приводит к
а

б
Рис.16. ПЭС управления тремя асинхронными нереверсивными электродвигателями
включению двигателя 3М и сигнальной лампы HL3. Размыкающий контакт K3 выключает катушку KM1, т.е. 1-й двигатель.
Блокировка контактами KM2 замыкающих контактов K1, включенных в цепь катушки KM2, необходима для того, чтобы при выключении KM1 и K1 (при срабатывании "Р" контактов K3) не произошло выключения KM2 (за счет размыкания контактов K1).
Задача 2. Составить принципиальную электрическую схему последовательного управления 3-мя асинхронными нереверсивными электродвигателями с выдержкой времени, т.е. "Пуск" —> 1дв + t1 2дв + t2 3дв – t3 1дв.
Кнопкой "Пуск" включается 1-й двигатель, 2-й двигатель включается автоматически через промежуток времени t1 после включения 1-го двигателя и т.д. Поставленная задача решается аналогично задаче 1, только здесь вводятся реле времени для получения промежутков времени.
Реализация задачи представлена на рис.17 только схемой управления пускателями магнитными, т.к. схема управления силовыми цепями электродвигателя остается аналогичной, рассмотренной в задаче 1.
В остальных задачах также рассматриваются только схемы управления пускателями магнитными, схемы же управления силовыми цепями электродвигателей аналогичны рассмотренным выше для нереверсивных и реверсивных электродвигателей, а количество участвующих электродвигателей не меняет самого принципа управления их силовыми цепями.
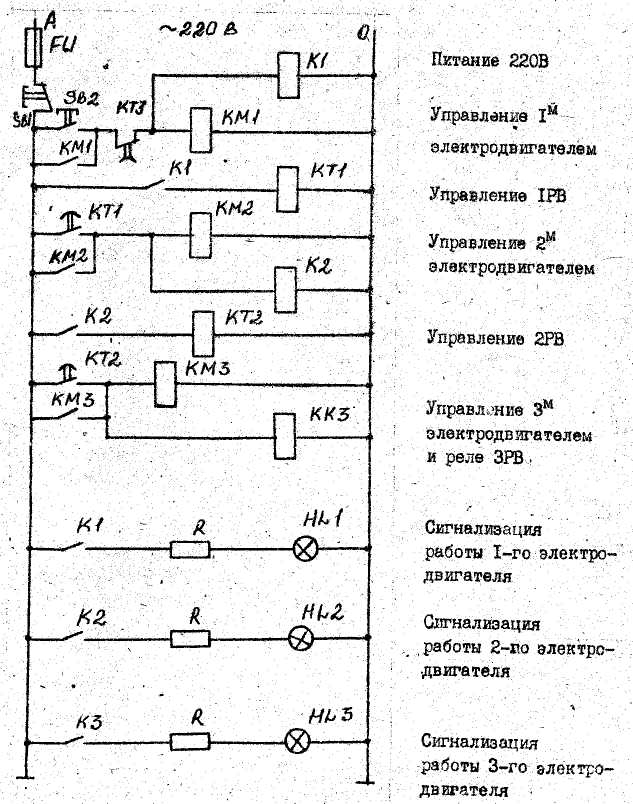
Рис.17. ПЭС последовательного управления 3-мя асинхронными нереверсивными электродвигателями с выдержкой времени
Задача 3. Составить электрическую схему блокировки работы 2-х асинхронных нереверсивных электродвигателей (рис.18).
Предусмотреть два варианта блокировки: Схема "а" - 2-й электродвигатель может быть включен, если не работает 1-й электродвигатель.
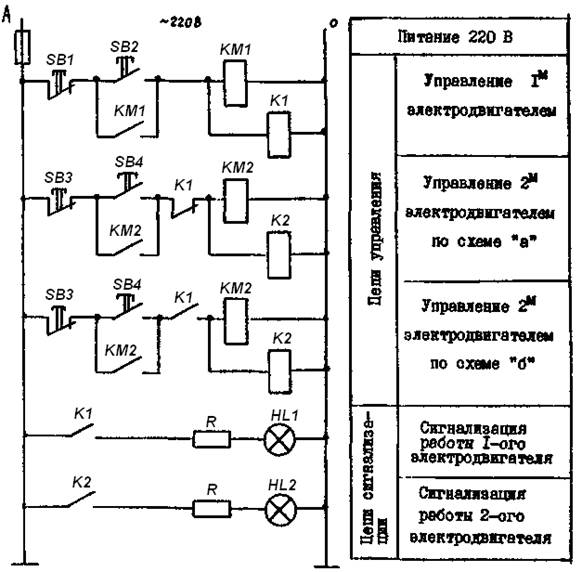
Рис.18. ПЭС блокировки работы 2-х асинхронных нереверсивных электродвигателей
Схема "б" - 2-й электродвигатель может быть включен, если работает 1-й электродвигатель.
По схеме "а" 2-й электродвигатель можно включить нажатием на кнопку SB4 только в том случае, если контакты K1, стоящие в цепи питания катушки KM2, будут замкнуты, что возможно лишь при неработающем 1РП, т.е. при неработающем 1-м двигателе.
По схеме "б", наоборот, контакты K1, стоящие в цепи KM2, будут замкнуты лишь при включении K1, т.е. когда 1-й электродвигатель работает.
Задача 4. Составить электрическую схему управления возвратно-поступательным движением задвижки.
Предусмотреть два варианта управления:
Вариант "а" - задвижка управляется вручную оператором и автоматически останавливается в крайних положениях ("открыто", "закрыто").
Вариант "б" - задвижка автоматически совершает движение из левого положения в правое и наоборот.
В случае составления электрической схемы, отображающей сложную взаимосвязь работы отдельных механизмов, предварительно, целесообразно составить структурную схему, которая дает общую картину взаимосвязи работы отдельных механизмов и аппаратов (рис.19).
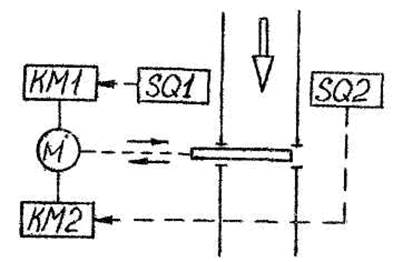
Рис.19. Структурная схема управления возвратно-поступательным движением задвижки
Для привода задвижки примечен реверсивный асинхронный электродвигатель, который управляется реверсивным пускателем магнитным, состоящим из пускателя магнитного, управляющего открытием задвижки (KM1), и пускателя магнитного, управляющего закрытием задвижки (KM2). Для автоматического останова задвижки в ее крайних положениях установлены конечные (путевые выключатели: SQ1 - в левом положении и SQ2 - в правом положении задвижки. На структурной схеме представлено, также направление взаимосвязи конечных выключателей с пускателями магнитными (пунктирной линией для варианта "а", сплошной - для варианта "б").
Исходя из рассмотренной структурной схемы, составлена принципиальная электрическая схема управления задвижкой (рис.20). На приведенной схеме включение контактов конечных выключателей для варианта "б" обозначено пунктирной линией. Для того чтобы не применять реле промежуточные, на схеме сигнальные лампы (HL1 и HL2) включены параллельно катушкам пускателей магнитных. При работе по варианту "б" можно не применять сигнальные лампы ЛСЗ и ЛСО, т.к. сигнализация крайних положений задвижки в этом случае необязательна.
Рассмотрим работу схемы для обоих вариантов.
Вариант "а", задвижка находится, например, в каком-то среднем положении (положение контактов на схеме соответствует этому случаю), сигнальные лампы HL3 и HL4 - не горят.
Если необходимо открыть полностью задвижку, то оператор нажатием на кнопку SB3 включает катушку пускателя магнитного KM1, что приводит к включению электродвигателя на открытие задвижки. При достижении задвижкой крайнего левого положения, она нажимает на шток конечного выключателя SQ1, что приводит к срабатыванию его контактов: "Р" контакт SQ1 разрывает цепь питания катушки KM1, тем самым выключается электродвигатель и задвижка останавливается, одновременно, происходит замыкание "З" контакта SQ1, что приводит к загоранию сигнальной лампы HL4, сигнализирующей об открытии задвижки, закрытие задвижки осуществляется аналогично, путем нажатия на кнопку SB2.
Задвижка, при необходимости, может быть остановлена в любом положении (как крайнем, так и промежуточном) путем нажатия на кнопку "стоп" (SB1).
Вариант "б". Задвижка находится первоначально, как и для варианта "а", в каком-то промежуточном положении. Оператор нажимает на кнопку SB2 или SB3.
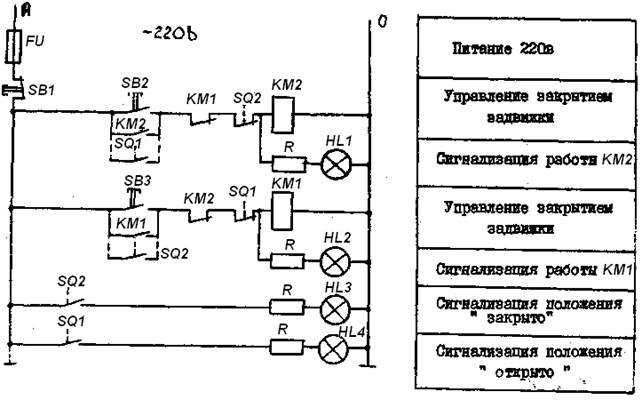
Рис.20. ПЭС управления возвратно-поступательным движением задвижки
Например, при нажатии на кнопку SB3 происходит то же, что и в рассмотренном случае для варианта "а". Задвижка открывается до крайнего левого положения, срабатывают контакты SQ1, но в отличие от варианта "а" движение задвижки не прекращается, т.к. одновременно с отключением KM1 включается катушка KM2, потому что параллельно кнопке SB2 включены "З" контакты SQ1. При закрытии задвижки срабатывают контакты SQ2, и движение задвижки автоматически меняется на противоположное. Как и в варианте "а", задвижку можно остановить в любой момент времени кнопкой "Стоп" (SB1).
Задача 5. Составить принципиальную электрическую схему управления работой насоса, подающего жидкость в накопительную емкость.
Схема должна предусматривать два режима работы: ручное управление (кнопками "Стоп" и "Пуск") и автоматический режим (от чувствительных элементов верхнего и нижнего уровней ВУ, НУ), работа в автоматическом режиме должна предусматривать осуществление следующих процессов: включение насоса при опорожнении емкости и его отключение при заполнении емкости (рис.21).
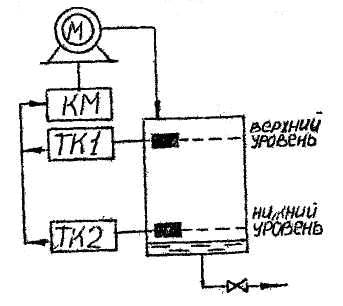
Рис.21. Структурная схема управления работой насоса, подающего жидкость в накопительную емкость
На рис.22 приведены электрические схемы управления работой насоса, реализующие поставленные задачи. Схемы "а" и "б" идентичны по выполняемым функциям, их различие заключается в том, что схема "а" выполнена по ГОСТу 2.725-68 и 2.747-68, а схема "б", как и все ранее приведенные схемы, по ГОСТу 2.755-74.
Рисунки иллюстрируют, как читать схемы, изображенные по разным ГОСТам. Это необходимо знать, т.к. в настоящее время, как уже указывалось, во многих учебных и справочных материалах принципиальные схемы еще изображаются по ГОСТу 2.725-68 и ГОСТу 2.747-68.
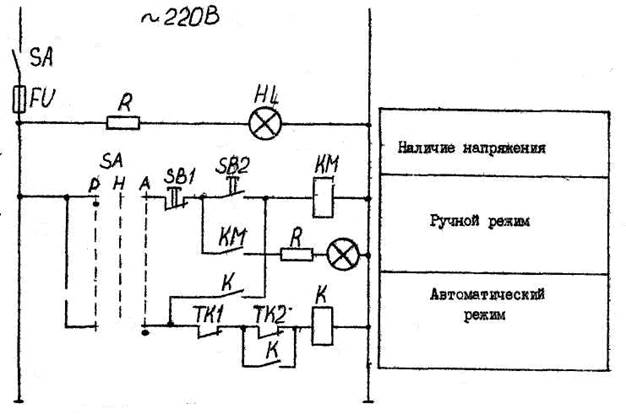
Рис.21. ПЭС управления работой насоса, подающего жидкость в накопительную емкость
ЛИТЕРАТУРА
1. ГОСТ 2.701-84 Схемы. Виды и типы. Общие требования к выполнению. – М.: Изд-во стандартов, 1992.
2. ГОСТ 2.702-75 Правила выполнения электрических схем. – М.: Изд-во стандартов, 1975.
3. ГОСТ 2.755-87 Обозначения условные графические в электрических схемах. Устройства коммутационные и контактные соединения. – М.: Изд-во стандартов, 1987.
4. ГОСТ 2.710-81 Обозначения буквенно-цифровые в электрических схемах. – М.: Изд-во стандартов, 1981.
6. ГОСТ 2.721-74 Обозначения условные графические в схемах. Обозначения общего применения. – М.: Изд-во стандартов, 1974.
Обозначения условные графические, наиболее часто встречающиеся при изображении принципиальных электрических схем
| НАИМЕНОВАНИЕ | Обозначение по ГОСТ 2.755-87 | Обозначение по ГОСТ 2.725-68 и ГОСТ 2.747-68 | |||
| 1. Контакт коммутационного (переключающего) устройства а) замыкающий | 
| 
| |||
| б) размыкающий | 
| 
| |||
| 2. Контакт, замыкающий с замедлителем, действующим: а) при срабатывании (замыкании) | 
| 
| |||
| б) при возврате (размыкании) | 
| 
| |||
| в) при срабатывании и возврате | 
|
Поиск по сайту©2015-2026 poisk-ru.ru
Все права принадлежать их авторам. Данный сайт не претендует на авторства, а предоставляет бесплатное использование. Дата создания страницы: 2022-09-12 Нарушение авторских прав и Нарушение персональных данных |
Поиск по сайту: Читайте также: Деталирование сборочного чертежа Когда производственнику особенно важно наличие гибких производственных мощностей? Собственные движения и пространственные скорости звезд |