Алгоритмы видеоанализа с точки зрения организации вычислительных процессов подразделяют на локальные и нелокальные арифметико-логические преобразования, с точки зрения функциональных этапов — на обучение и распознавание.
С точки зрения соотношения между объемами входной и выходной информации арифметико-логические преобразования подразделяют на функции предварительной обработки изображений и построения описаний. При предварительной обработке объем выходной информации равен объему входной (матрица изображения преобразуется в выходную матрицу). Задачами предварительной обработки являются: подавление помех, сглаживание, оконтуривание, разделение слипшихся объектов, выделение срединных линий объектов.
При построении описаний объем выходной информации значительно меньше объема информации на входе. Основные задачи при построении описаний — выделение интегральных признаков (статических, спектральных и др.) и структурно-синтаксических образов (топологических, грамматических).
Рассмотрим локальные и нелокальные преобразования, так как они определяют аппаратную и программную реализацию вычислительных устройств, осуществляющих сенсорные функции.
При локальных преобразованиях (рис. 1.12) вычисляемые параметры, т. е. новое значение точки  в преобразуемой
в преобразуемой
входной матрице изображения и размерность изображения  ;
;
 (.
(.  — размерность изображения), являются арифметико-логическими функциями значений точек в некоторой локальной окрестности S точки
— размерность изображения), являются арифметико-логическими функциями значений точек в некоторой локальной окрестности S точки 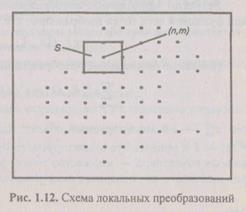

с координатами (и, /и): 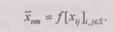
В качестве примеров локальных арифметико-логических операций приведем соотношения, определяющие: сглаживающий фильтр:

и оконтуривающий

Их работа иллюстрируется рис. 1.13.
Результат нелокального преобразования является арифметико-логической функцией всех точек изображения, т. е.:
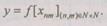
Линейные нелокальные преобразования описываются выражением

где  —
—  анализируемый объект;
анализируемый объект;  — распознающий оператор;
— распознающий оператор;
 —
—  признак
признак  анализируемого изображения;
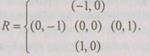
анализируемого изображения;  — число распознаваемых объектов; S — множество точек изображения, входящих в траектории линейного или полярного сканирования; к — номер признака.
— число распознаваемых объектов; S — множество точек изображения, входящих в траектории линейного или полярного сканирования; к — номер признака.
Если множество 5 образовано траекториями линейного сканирования, то в общем случае признаки  не инвариантны к сдвигам, вращению и масштабированию. Один из способов получения инвариантного описания состоит в организации полярного сканирования (см. рис. 1.14).
не инвариантны к сдвигам, вращению и масштабированию. Один из способов получения инвариантного описания состоит в организации полярного сканирования (см. рис. 1.14).
Рассмотрим пример возможного подхода к построе  нию инвариантного описания, состоящего из двух операций: вычисление центра тяжести (ЦТ) объекта Q в кадре и выполнение одномерных преобразований Фурье по семейству концентрических окружностей с началом ко- > ординат в центре тяжести,
нию инвариантного описания, состоящего из двух операций: вычисление центра тяжести (ЦТ) объекта Q в кадре и выполнение одномерных преобразований Фурье по семейству концентрических окружностей с началом ко- > ординат в центре тяжести,

Обоснованность такого подхода определяется тем, что амплитудная характеристика преобразования Фурье не зависит от угловой ориентации и пространственного положения объекта, а также в определенной степени и от масштабирования. Используемое число концентрических окружностей зависит от сложности внутренней структуры объекта, числа распознаваемых объектов и требуемой помехозащищенности. Информация, содержащаяся в фазовой характеристике преобразования, определяет угловую ориентацию. Координаты центра тяжести характеризуют положение объекта на плоскости.
Общие требования, предъявляемые к сенсорным системам в РТК и ГАП:
построение на модульной основе;
распознавание должно быть в реальном масштабе времени в соответст
вии с производственным ритмом (не более 1 с);
распознавание должно быть помехоустойчивым (т. е. не более заданно
го процента искажений);
надежность должна сочетаться с низкой стоимостью;
реализация динамических задач осуществляется с помощью специаль
ных аппаратных средств.