Потребной мощностью горизонтального полета называется мощность, необходимая для обеспечения ГП на данной скорости и высоте
Nпотр = Nинд + Nпроф + Nдвиж
Nинд – это мощность для создания составляющей Уан, равной весу вертолета.
Nпроф – мощность для преодоления Хпроф лопастей, на преодоление момента сопротивления.
Nдвиж – мощность для создания движущей силы несущим винтом на преодоление Хвр вертолета.

Криволинейное изменение графика объясняется тем, что при начале движения с режима висения слагаемые потребной мощности изменяются по своим графикам.
При начале поступательного движения НВ начинает работать в режиме косого обтекания, с увеличением Wэф тяга НВ самопроизвольно возрастает. Необходимо с ростом скорости уменьшать индуктивную мощность (Nинд).
С началом движения Nпроф увеличивается незначительно, так как возрастание Wэф несоизмеримо мало с окружной скоростью элементов лопасти. Поэтому профильное сопротивление лопастей при малых скоростях ГП растет незначительно, что ведет к небольшому увеличению Nпроф.
С началом движения появляется сопротивление Хвр и начинает возрастать в зависимости от увеличения скорости. Поэтому увеличение Nдвиж, затраченной на преодоление Хвр, также возрастает с увеличением скорости полета.
В начале поступательного движения до определенной скорости потребная мощность несколько “падает”. Уменьшение Nинд преобладает над увеличением Nпроф и Nдвиж. Затем происходит “застой” мощности, равновесие и далее увеличение Nпроф и Nдвиж преобладает над уменьшением Nинд. “Застой” мощности происходит в пределах скорости, называемой “экономической” (Vэк).
С ростом высоты потребная мощность увеличивается. Это объясняется уменьшением плотности воздуха на высоте, что ведет к уменьшению Rнв. Чтобы ее поддерживать, необходимо увеличивать установочный угол лопасти, что ведет к увеличению Мсопр. Для его преодоления нужно подвести большую Nпроф, а значит увеличить Nп.
С ростом полетного веса происходит та же картина.
С увеличением влажности падает плотность воздуха. Из формулы тяги НВ плотность влияет на Rнв. Чтобы ее поддержать, необходимо также увеличивать установочный угол.
Располагаемая мощность НВ – это часть эффективной мощности двигателей, которая расходуется на вращение НВ при работе двигателей.


Nе – полная мощность создаваемая двигателями;
Nрв – мощность затрачиваемая на привод РВ (~ 9,5 % висение, ~6,5 % на Vмакс);
Nтр – мощность на трение в трансмиссии (~3 %);
Nагр – мощность на привод агрегатов (~0,8 %);
Nохл – мощность на привод вентилятора для охлаждения агрегатов (~1,2 %);
Nвсас – мощность на потери во входном устройстве (при всасывании ~2,5 %).
Располагаемая мощность до Vэк увеличивается, так как необходимо подводить меньшую Nрв на привод РВ, вследствие косого обтекания. С дальнейшим увеличением скорости потери на РВ увеличиваются и Nр уменьшается.
Экономическая скорость – Vгп на которой Nпотр минимальна. На Vэк в горизонтальном полете имеется максимальный избыток мощности и требуется наименьшая мощность для выполнения полета. На Vэк наименьший часовой расход топлива – максимальная продолжительность полета.
Минимальная скорость - Vгп на которой вертолет может удерживаться в воздухе на данной высоте на взлетном (номинальном) режиме работы двигателей. В эксплуатации Vмин ограничивается не только запасом мощности двигателей, но и вибрациями вертолета на малых скоростях, сложностью пилотирования и несовершенством указателя скорости. Теоретически Vмин от земли до Нст остается постоянной = 0 км/ч (статический потолок Нст – высота, на которой Nр равна Nпотр при скорости 0 км/ч в стандартной атмосфере). Выше Нст висение невозможно, поэтому на высоте большей Нст вертолет перемещается только с поступательной скоростью за счет прироста тяги НВ от косой обдувки. Поэтому от Нст до Ндин (динамический потолок Ндин – практическая максимальная высота полета, когда Nр равна Nпотр при экономической скорости ~120 км/ч) Vмин на Ндин равна Vэк. Минимальная скорость ГП ограничивается РЛЭ.
Наивыгоднейшая скорость – Vгп, на которой достигается максимальная дальность полета из-за минимального километрового расхода топлива.
Максимальная скорость – это Vгп, которую может развить вертолет при использовании номинального (взлетного) режима двигателей, если вертолет не имеет ограничений по срыву потока с лопастей. Vмакс изменяется в соответствии с изменением мощности двигателей в зависимости от высоты полета (из-за плотности воздуха). Ограничивающим условием Vмакс ГП является срыв потока с концов лопастей. Повышение Vмакс осуществляется увеличением пропульсивной силы, что связано с увеличением угла установки лопасти. Одновременно увеличивается Wэф концевых сечений лопастей в азимуте 90о, и при превышении Vмакс наступает волновой кризис. В азимуте 270о повышается интенсивность маховых движений и лопасти попадают в закритические углы обтекания. Эксплуатационная максимальная скорость устанавливается из условий обеспечения допустимого уровня вибраций вертолета, из условий обеспечения достаточной прочности несущей системы и других частей вертолета и из условия сохранения достаточной управляемости вертолета. Vмакс ГП так же ограничивается РЛЭ.

т.1 – режим висения (частный случай V = 0);
т.2 – экономический режим, на Vэк при Nпотр минимальной и Nр максимальной наибольшая продолжительность полета;
т.3 – наивыгоднейший режим полета, максимальная дальность;
т.4 – максимальная скорость на этом режиме Nр = Nпотр.;
т.5 –минимальная скорость горизонтального полета;
т.6 – максимальная скорость полета.
Режимы полета. Руление
Руление разрешается при прочности грунта не менее 3кг/см2. Если площадка пыльная или заснеженная, то толщина пыли или снега не должна превышать 10 см. Скорость руления при этом не более 10 км/ч.
Чтобы тронуться с места, необходимо ввести правую коррекцию, увеличить на 3-5о общий шаг и отклонить РУ “от себя”.


Отклоняя РУ “от себя”, создается Хан – движущая сила на рулении. Но при этом возрастает сила Уан, которая уменьшает сцепление колес с земной поверхностью – основное условие устойчивости и отсутствия “юза”. При вращении винта создается Мр, необходимо создавать Ррв, которую компенсируют отклонением РУ “вправо”. Силы трения удерживают вертолет от “юза”. При рулении по скользкому грунту или льду резко возрастает возможность появления “юза”. Отклонением РУ “вправо” создается сила Zан для парирования Ррв - основной силы, стремящейся создать “юз”. Для отсутствия крена на рулении моменты от Ррв и Zан должны быть одинаковы.
Ррв hрв = Zан Н
Но Н > hрв, поэтому Ррв должна быть больше Zан, а это стремление вертолета к “юзу”. Основным ограничивающим условием на рулении является скорость. Для создания большей скорости необходимо увеличить Хан, а это ведет к увеличению Уан, что уменьшает сцепление колес с землей. Если Уан ~ Nп(з) то наступает взвешенное состояние. Поэтому скорость на рулении ограничена до 30 км/ч из условий достаточного сцепления колес с землей, отсутствия “юза” и для предотвращения явления “земной резонанс” (подробнее на стр.73). Для улучшения устойчивости на рулении Уан должна быть много меньше Nп(з). Уменьшить Уан можно, уменьшив ОШ до минимального значения. Но при этом, отклоняя РУ “от себя” для создания необходимой силы Хан для руления, конус НВ отклоняется вперед и лопасти в азимуте 180о начинают ударять по ограничительным упорам втулки НВ. Избежать этого удается, уменьшив обороты НВ до 80% по указателю с одновременным увеличением ОШ до 3о. При этом лопасти в азимуте 180о не достают до упоров. НВ при оборотах 80% создает меньший Мр, но при этом достаточную тягу для создания необходимой силы Хан и Zан, и сила Уан при этом много меньше по значению, чем Nп(з). Но РЛЭ вертолета предписывает рулить при полностью введенной правой коррекции и ОШ 3о, для предотвращения явления “земной резонанс” при порывистом ветре и неровном грунте.
Развороты на рулении необходимо выполнять плавным отклонением педали в сторону разворота и дополнительным отклонением РУ (для компенсации возникающей центробежной силы), не допуская при этом полной разгрузки амортстоек колес и “юза”. При выполнении разворотов необходимо помнить, что чем больше скорость, тем больше должен быть радиус разворота.
Для прекращения “юза” необходимо уменьшить мощность двигателей до минимальной, плавно отклонить педаль в сторону “юза” и остановить вертолет. Уменьшение мощности двигателей является основным условием прекращения “юза”, так как с уменьшением Уан увеличивается Nп(з), уменьшается скорость руления и инерционные силы. Боковой ветер ухудшает условия руления. Необходимо дополнительно увеличивать отклонение РУ и педалей в сторону ветра, что влечет увеличение Уан и уменьшает сцепление колес с землей. Поэтому РЛЭ вводит ограничения по силе бокового ветра при рулении.
Для одновинтовых вертолетов с 3-х стоечным шасси есть тенденция опрокидывания вперед – влево при выполнении руления.
Для создания равновесия необходимо чтобы момент от Ррв был компенсирован моментом от Zан. Но из-за разной высоты hрв и Н необходимо тягу РВ делать больше Zан. В сумме они дают силу (Ррв – Zан), приложенную на каком-то расстоянии от втулки. Вместе с силой Хан она дает результирующую силу Fрез, направленную в сторону их сложения.

По высоте Fрез находится достаточно высоко и является причиной опрокидывания вперед-влево. Поэтому любое препятствие на пути руления может вызвать опрокидывание, и РЛЭ определяет условие руления только по ровному и прочному грунту. Основной причиной всех неприятностей при рулении (опрокидывание, “юз”) является подвод мощности к НВ. Поэтому при возникновении “юза” или признаков опрокидывания необходимо немедленно устранить первопричину – убрать мощность.
При появлении крена на рулении вперед-влево необходимо:
- немедленно сбросить шаг НВ и вывести коррекцию влево;
- отклонить РУ “вправо”;
- отклонить левую педаль “вперед”;
- остановить вертолет.
Продолжить руление, избегая наезда на кочки и попадания в ямы.
Режимы полета. Висение
Режим висения – такой режим, когда вертолет сохраняет заданную высоту и не перемещается относительно воздуха (в штиль) и относительно земной поверхности.
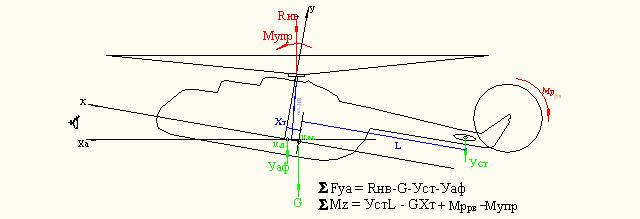
Основным условием висения является постоянство углов, высоты, равенство нулю скоростей по всем осям координат. Это достигается, когда сумма всех сил и моментов относительно любой оси равна нулю.
Для выполнения висения в продольном отношении необходимо взять ручку управления “на себя”, чтобы в начальный момент “выбрать” конструктивную величину “угла заклинения вала НВ”. Увеличить ОШ до выхода амортстоек и отрыва вертолета от земли. Снять триммером усилия на органах управления и сбалансировать вертолет без смещений и разворотов в полувзвешенном состоянии. Затем отделить вертолет от земли. В момент отрыва РУ отклоняется в зависимости от продольной центровки.
Рассмотрим варианты управления с нормальной и предельными передней и задней центровками.
При небольшой передней (нормальной) центровке вертолет после отрыва от земли зависает с углом тангажа +4о +5о, и РУ в продольном отношении балансируется в этом положении. Положение ц.д. от центровки не зависит, и для простоты понимания будем считать, что сила Уаф момент относительно оси Z не дает. Таким образом, завал конуса отсутствует и отсутствует Мупр. 
При предельно-передней центровке в момент отрыва вертолет стремится опустить нос, поэтому РУ необходимо отклонить “на себя” за среднее положение на величину не более ½ полного хода РУ в продольном отношении, и вертолет балансируется с углом тангажа ~0,5о.

При предельно-задней центровке в момент отрыва вертолет стремится “задрать нос” на кабрирование, поэтому РУ необходимо отклонять “от себя” за среднее положение на величину не более ¼ полного хода РУ в продольном отношении, и вертолет балансируется с углом тангажа ~ 7о.
Для выполнения висения в поперечном отношении необходимо РУ отклонить “вправо” для создания боковой силы Zан, которая должна быть равна тяге рулевого винта Ррв, для отсутствия боковых перемещений. 
На висении вертолет балансируется с правым креном ~2,5о под влиянием Мупр от завала конуса вправо (так как на висении Ут и hрв почти равны, то и МхZан примерно равен MxPрв).
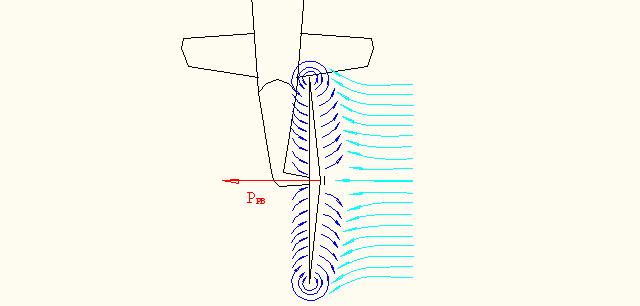
Для балансировки вертолета в путевом отношении при зависании необходимо отклонять правую педаль “вперед”. При увеличении шага НВ увеличивается реактивный момент НВ, вертолет стремится развернуться влево. Для компенсации реактивного момента необходимо увеличить тягу РВ, произведение которой на плечо L создает момент РВ. Чем больше взлетная масса вертолета, тем больше необходимо отклонять правую педаль “вперед”.

Более сложным по технике пилотирования является выполнение висения при боковом ветре. При боковом ветре слева рулевой винт работает в осевом потоке, подобно несущему винту при вертикальном подъеме. При увеличении скорости ветра слева уменьшаются углы атаки элементов лопастей. Чтобы сохранить тягу винта необходимо увеличивать угол установки лопастей правой педалью. Несмотря на это потребная мощность для вращения РВ почти не изменяется, так как в процессе восстановления путевого равновесия уменьшение угла атаки элементов лопастей от бокового ветра компенсируется увеличением углов установки лопастей примерно на такую же величину, и они работают на тех же углах атаки, что и при висении в штиль.
При боковом ветре справа рулевой винт работает в осевом потоке, подобно несущему винту при вертикальном снижении. При увеличении скорости ветра углы атаки элементов лопастей РВ увеличиваются. При малой скорости ветра (2-3 м/с) наблюдается уменьшение потребного балансировочного хода вперед правой педали по сравнению с висением в штиль. Однако при больших скоростях ветра справа угол атаки лопастей РВ увеличивается настолько, что происходит срыв потока и резкое падение тяги РВ. Кроме того отбрасываемый винтом воздушный поток, взаимодействуя с потоком ветра, засасывается обратно в зону над винтом, создавая эффект “вихревого кольца” (подробнее рассмотрим на примере НВ в главе “снижение”). Правая педаль уходит вперед до упора, а вертолет самопроизвольно разворачивается влево. Таким образом, основной причиной возможной потери путевой устойчивости вертолета на висении с правым боковым ветром является падение тяги РВ из-за срыва потока с лопастей и потерь на вихреобразование при попадании РВ в режим “вихревого кольца”.
Чтобы исключить самопроизвольное вращение вертолета влево на висении с правым боковым ветром РЛЭ Ми-8 ограничивает силу ветра до 5м/с. При висении необходимо немедленно упреждать начало вращения вертолета отклонением правой педали, стараться уменьшить угол ветра справа. Если правая педаль становится на упор, необходимо энергично сбросить шаг-газ на 2-3о (при запасе высоты). Этим действием уменьшается угол атаки лопастей РВ, уменьшается срыв потока, увеличивается тяга РВ и уменьшается реактивный момент НВ, разворот влево прекращается.