ОП.03. Техническая механика с основами технических измерений
Урока)
Гр. 92. Техническая механика с основами технических измерений
Преподаватель: Рыжонкова С.А.
Адрес электронной почты: ryzhonkovasvetlana@yandex.ru
Тема: Практическое занятие №1 по теме: Кинематические пары
Цель: ИзучитьКинематические пары
Форма работы: индивидуальная, дистанционное обучение
Тип урока: Практическое занятие (2 урока)
ОК 1 - 9
ПК 1.1 - 1.6, 2.1 - 2.4, 3.1 - 3.4. 4.1 - 4.5
Вырабатываемые умения и навыки
ОК 1. Понимать сущность и социальную значимость своей будущей профессии, проявлять к ней устойчивый интерес.
ОК 2. Организовывать собственную деятельность, выбирать типовые методы и способы выполнения профессиональных задач, оценивать их эффективность и качество.
ОК 3. Принимать решения в стандартных и нестандартных ситуациях и нести за них ответственность.
ОК 4. Осуществлять поиск и использование информации, необходимой для эффективного выполнения профессиональных задач, профессионального и личностного развития.
ОК 5. Использовать информационно-коммуникационные технологии в профессиональной деятельности.
ОК 6. Работать в коллективе и в команде, эффективно общаться с коллегами, руководством, потребителями.
ОК 7. Брать на себя ответственность за работу членов команды (подчиненных), за результат выполнения заданий.
ОК 8. Самостоятельно определять задачи профессионального и личностного развития, заниматься самообразованием, осознанно планировать повышение квалификации.
ОК 9. Ориентироваться в условиях частой смены технологий в профессиональной деятельности.
ПК 1.1. Выполнять регулировку узлов, систем и механизмов двигателя и приборов электрооборудования.
ПК 1.2. Подготавливать почвообрабатывающие машины.
ПК 1.3. Подготавливать посевные, посадочные машины и машины для ухода за посевами.
ПК 1.4. Подготавливать уборочные машины.
ПК 1.5. Подготавливать машины и оборудование для обслуживания животноводческих ферм, комплексов и птицефабрик.
ПК 1.6. Подготавливать рабочее и вспомогательное оборудование тракторов и автомобилей.
ПК 2.1. Определять рациональный состав агрегатов и их эксплуатационные показатели.
ПК 2.2. Комплектовать машинно-тракторный агрегат.
ПК 2.3. Проводить работы на машинно-тракторном агрегате.
ПК 2.4. Выполнять механизированные сельскохозяйственные работы.
3.1. Выполнять техническое обслуживание сельскохозяйственных машин и механизмов.
ПК 3.2. Проводить диагностирование неисправностей сельскохозяйственных машин и механизмов.
ПК 3.3. Осуществлять технологический процесс ремонта отдельных деталей и узлов машин и механизмов.
ПК 3.4. Обеспечивать режимы консервации и хранения сельскохозяйственной техники.
ПК 4.1. Участвовать в планировании основных показателей машинно-тракторного парка сельскохозяйственного предприятия.
ПК 4.2. Планировать выполнение работ исполнителями.
ПК 4.3. Организовывать работу трудового коллектива.
ПК 4.4. Контролировать ход и оценивать результаты выполнения работ исполнителями.
ПК 4.5. Вести утвержденную учетно-отчетную документацию.
Обеспечение занятий: калькулятор, линейки, карандаши, ручки, рабочая тетрадь.
Место проведения: индивидуальное, электронное обучение
Время проведения: 1 час, (1 урок).
Практическая часть:
1. Кинематическая пара
2. Классификация кинематических пар
3. Высшие и низшие кинематические пары
Методические указания к практической работе описание самой работы
1. Записать определение что называется кинематической парой
2. Записать классификацию кинематических пар
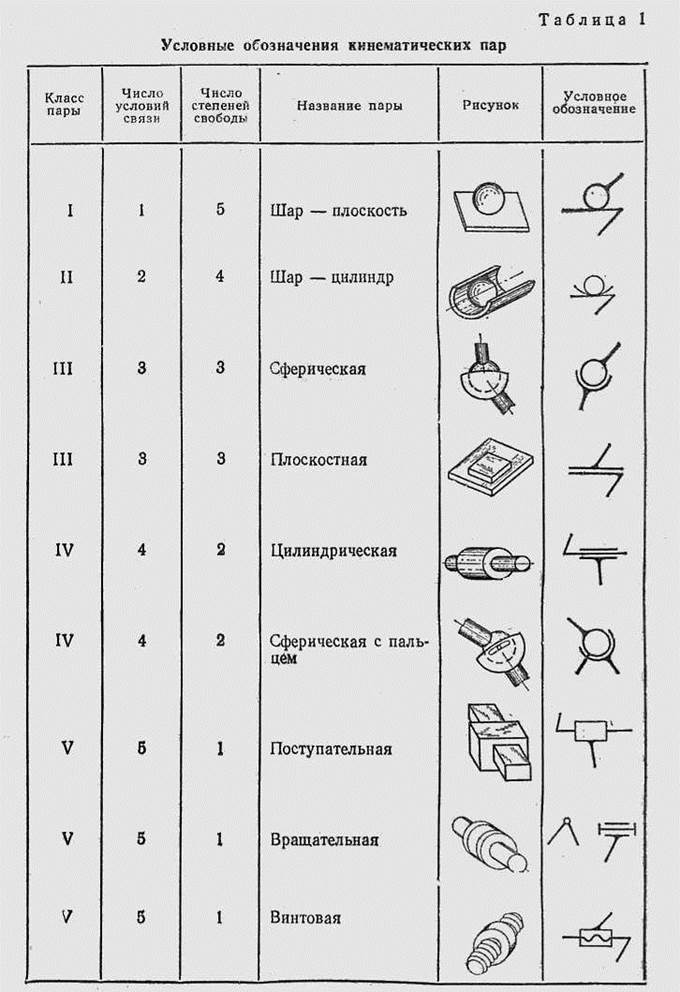
3. Зарисовать Таблицу 1 в тетрадь
3. Ответить на контрольные вопросы
Краткие теоретические сведения
Кинематическая пара — это соединение двух звеньев, обеспечивающее определённое относительное движение. Для всех кинематических пар необходим постоянный контакт между их элементами, это достигается либо с помощью определённых усилий, либо приданием элементам определённой геометрической формы.
Классификация кинематических пар
По числу связей на относительное движение: от одной до пяти связей. Это связано со степенями свободы, которых для материального тела всего шесть; исключая (связывая) по одной, мы получаем пять вариантов связей.
По контакту между звеньями: высшие (контакт по точке или линии); низшие (контакт по поверхности).
На движение любого звена накладываются определенные ограничение, зависящие от способа соединения звеньев пары. Эти ограничения называются условными связями вкинематических парах. В общем случае всякое свободно движущееся в пространстве тело обладает шестью степенями свободы, т.е. может поступательно перемещаться вдоль трех осей в пространстве (x, y, z), а также вращаться относительно этих осей. Относительные перемещения звеньев кинематической пары ограничено условиями связи. Число этих связей может быть различно, но не более пяти. В противном случае звенья теряют относительную подвижность и кинематическая пара переходит в жесткое соединение двух звеньев. С другой стороны, число условий связи не может быть меньше единицы, так как в этом случае число связей равно нулю, звенья не соприкасаются и кинематическая пара перестает существовать. Возможные оставшиеся движения могут быть независимыми друг от друга или связанными, т.е. на них накладываются дополнительные геометрические условия. Для того чтобы элементы кинематических пар находились в постоянном соприкосновении, они должны быть замкнуты. Замыкание осуществляется либо геометрическим, либо силовым способом. Силовое замыкание осуществляется под действием веса, силы упругости пружины.
Классификация кинематических пар
Таблица 1.
Контрольные вопросы
1. Что такое кинематическая пара, дать определение?
2. Что такое степень свободы кинематической пары?
3. Как определяется число степеней свободы, от чего оно зависит?
4. Дать определение замыкания кинематической пары?